1.本发明涉及数控系统中运动控制技术领域,更具体地说,涉及一种正矢平方型加减速控制算法。
背景技术:
2.堆垛机是智能化立体仓库的核心搬运设备,其自身的性能指标影响着整个物流系统,并直接决定了存取效率及成本。当前社会中堆垛机持续发展,高度越来越高,速度越来越快,带来的问题是立柱振动越来越大,极大的影响了堆垛机运动稳定性和效率。
3.堆垛机使用梯形加减速算法加速度不连续,容易造成立柱振动;传统s型加减速算法虽然加速度连续但是加加速度不连续,有柔性冲击存在;正弦型加减速算法中加加速度在各个端点处出现阶跃变化,同样有振动冲击。因此需要发明一种加加速度连续的加减速控制算法。
技术实现要素:
4.1.要解决的技术问题
5.针对现有技术中存在的问题,本发明的目的在于提供一种正矢平方型加减速控制算法,它可以实现,加速度连续,降低了系统激励,保证加加速度连续平滑,满足速度曲线的连续与平滑性,并且抑制堆垛机立柱振动。
6.2.技术方案
7.为解决上述问题,本发明采用如下的技术方案。
8.一种正矢平方型加减速控制算法,包括以下步骤:
9.s1:算法输入参数有系统机械性能约束条件,轨迹约束条件;
10.s2:输出时间参数,定义时间参数;
11.s3:定义所研究正,平方型加减速算法的各参数曲线与时间参数的关系表达式;
12.s4:实施正矢平方型加减速控制算法。
13.进一步的,所述s1中机械性能约束条件包含加速运动阶段最大加速度a
amax
、加速运动阶段最大加加速度j
amax
、减速运动阶段最大加速度a
dmax
、减速运动阶段最大加加速度j
dmax
,轨迹约束条件包含最大速度v
max
、起点速度vs、终点速度ve、轨迹总长度s
seg
。
14.进一步的,所述s2中输出时间参数有t1,t2,t3,t4,t5,t6,t7,所述定义时间参数有加加速段时间长度t1=t1、匀加速段时间长度t2=t
2-t1、减加速段时间长度t3=t
3-t2、匀速段时间长度t4=t
4-t3、加减速段时间长度t5=t
5-t4、匀减速段时间长度t6=t
6-t5、减减速段时间长度t7=t
7-t6,且t1=t3、t5=t7。
15.进一步的,所述s3参数曲线包含加加速度参数、加速度参数、速度参数、位移参数,且与时间参数的关系表达式分别为:j(t)、a(t)、v(t)、s(t),再构造以正矢平方函数(1-cosx)2=1-2cosx (cosx)2为核心的速度公式,则获得正矢平方型加减速算法各阶段表达式。
16.进一步的,所述正矢平方型加减速算法各阶段表达式为:
17.(1)加加速运动段t∈[0,t1),各参数曲线表达式:
[0018][0019]
(2)匀加速运动段t∈[t1,t2),各参数曲线表达式:
[0020][0021]
式中:
[0022]
(3)减加速运动段t∈[t2,t3),各参数曲线表达式:
[0023][0024]
式中:v2=v1 a
amax
t2;
[0025]
(4)匀速运动段t∈[t3,t4),各参数曲线表达式:
[0026][0027]
式中:
[0028]
(5)加减速运动段t∈[t4,t5),各参数曲线表达式:
[0029][0030]
式中:v4=v
ma
x=v3;s4=s3 v3t4[0031]
(6)匀减速运动段t∈[t5,t6),各参数曲线表达式:
[0032][0033]
式中:
[0034]
(7)减减速运动段t∈[t6,
t
7),各参数曲线表达式:
[0035][0036]
式中:v6=v
5-a
dmax
t6;
[0037]
五段运动曲线时,式中:
[0038]
根据以上公式可确定各运动段参数,确定正矢平方型速度加减速算法曲线模型。
[0039]
进一步的,所述s4中正矢平方型加减速控制算法具体实施步骤为:
[0040]
步骤1:校验起点速度终点速度可达性;
[0041]
步骤2:匀加速运动段存在性校验;
[0042]
步骤3:匀减速运动段存在性校验;
[0043]
步骤4:匀速运动段存在性校验。
[0044]
进一步的,所述步骤1中校验起点速度终点速度可达性的方法为:
[0045]
综合轨迹段长度s
seg
、加速度(a
amax
和a
dmax
)和加加速度(j
amax
和j
dmax
)的约束条件,计算实际能够达到的起点速度和终点速度,并以此修正加减速输入的起点速度vs和终点速度ve,
[0046]
1)当vs=ve时,跳转步骤2;
[0047]
2)当vs<ve,综合多约束计算实际能够达到的终点速度ve;
[0048]
当仅存在加加速段和减加速段时,加速段最大位移为:
[0049][0050]
当同时存在加加速段、匀加速段和减加速段时,加速段最大位移为:
[0051][0052]
若s
seg
≥s
a3_max
,表明此时给定轨迹段长满足加减速控制要求,直接跳转到步骤2;
[0053]
若s
a2_max
≤s
seg
<s
a3_max
,表明此时轨迹段长度能够满足加减速达到用户设定最大加速度,但无法满足加减速达到用户设定终点速度,修正终点速度和实际最大速度,并跳转到步骤2;
[0054]
修正终点速度和实际最大速度表达式为:
[0055][0056]
若s
seg
<s
a2_max
,表明此时轨迹段长较短,实际最大加速度小于用户设定最大加速度a
amax
,采用盛金公式法计算最大加速度,以及修正终点速度和实际最大速度的表达式为:
[0057][0058][0059]
3)当vs>ve,综合多约束计算实际能够达到的起点速度vs;
[0060]
当仅存在加减速段和减减速段时,减速段最大位移为:
[0061][0062]
当同时存在加减速段、匀减速段和减减速段时,减速段最大位移为:
[0063][0064]
若s
seg
≥s
d3_max
,表明此时给定轨迹段长满足加减速控制要求,直接跳转到步骤2;
[0065]
若s
d2_max
≤s
seg
<s
d3_max
,表明此时轨迹段长度能够满足加减速达到用户设定最大加速度,但无法满足加减速达到用户设定终点速度,修正终点速度和实际最大速度,并跳转到步骤2;
[0066]
修正终点速度和实际最大速度表达式为:
[0067][0068]
若s
seg
<s
d2_max
,表明此时轨迹段长较短,实际最大加速度小于用户设定最大加速度a
dmax
,采用盛金公式法计算最大加速度,以及修正终点速度和实际最大速度的表达式为:
[0069][0070][0071]
进一步的,所述步骤2中匀加速运动段存在性校验的方法为:
[0072]
《1》当则存在匀加速运动段,加速运动段实际可以达到的加速度即为系统输入加速运动段最大加速度,计算加加速、匀加速和减加速运动段时间长度的表达式为:
[0073][0074]
《2》当则不存在匀加速运动段,加速运动段实际可以达到的最大加速度小于系统输入加速运动阶段最大加速度,计算加加速、匀加速和减加速运动段时间长度的表达式为:
[0075][0076]
《3》根据式
③
,并结合式或式
[0077][0078]
按式计算包含加加速运动段、匀加速运动段和减加速运动段在内的加速运动段所需总位移长度sa,并跳转到步骤3。
[0079]
进一步的,所述步骤3中匀减速运动段存在性校验的方法为:
[0080]
1》些则存在匀减速运动段,减速运动段实际可以达到的加速度即为系统输入减速运动段最大加速度,计算加减速、匀减速和减减速运动段时间长度的表达式为:
[0081][0082]
2》当则不存在匀加速运动段,加速运动段实际可以达到的最大加速度小于系统输入加速运动阶段最大加速度,计算加减速、匀减速和减减速运动段时间长度的表达式为:
[0083][0084]
3》根据式
⑦
,并结合式或式
[0085][0086]
按式计算包含加减速、匀减速和减减速运动段在内的减速运动段所需总位移长度sd,并跳转到步骤4。
[0087]
进一步的,所述步骤4中匀速运动段存在性校验的方法为:
[0088]
当s
seg
≥sa sd,则存在匀速运动段,运行过程中实际能够达到的最大速度v
max_act
等于系统输入最大速度v
max
,计算匀速运动段运动时间长度,计算完成后结束加减速控制算法流程,
[0089]
计算匀速运动段运动时间长度表达式为:
[0090][0091]
当s
seg
<sa sd,则不存在匀速运动段,即t4=0。
[0092]
通过上述4个校验步骤,可确定正矢平方型曲线加减速控制输出的七个运动段运动时间,并且加加速度、加速度和速度均不超过系统机械性能约束,即可实施正矢曲线加减速控制算法。
[0093]
3.有益效果
[0094]
相比于现有技术,本发明的优点在于:
[0095]
(1)本方案采用传统s型加减速控制算法的堆垛机加加速度呈阶跃变化,而采用正矢平方型加减速控制算法后,加加速度平滑且连续。
[0096]
(2)本方案采用正矢平方型加减速控制算法的堆垛机比采用传统s型加减速控制算法对立柱的冲击和振动更小,抑制立柱振动幅度的效果更好,提高了系统加减速的平滑性。
[0097]
(3)本方案所提出的正矢平方型加减速控制算法可满足高速高精加工对运行时间短、运动平稳、速度光滑、无冲击和精度高等加减速特性的要求,并提高其灵活性,可满足更多用户群的应用需求。
附图说明
[0098]
图1为是正矢平方型加减速控制曲线;
[0099]
其中,包括位移、速度、加速度、加加速度曲线;
[0100]
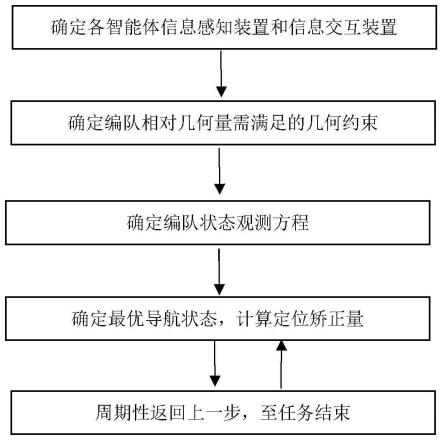
图2为正矢平方型曲线加减速控制算法流程图。
具体实施方式
[0101]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0102]
实施例1:
[0103]
请参阅图1-2,一种正矢平方型加减速控制算法,包括以下步骤:
[0104]
s1:算法输入参数有系统机械性能约束条件,轨迹约束条件;
[0105]
s2:输出时间参数,定义,间参数;
[0106]
s3:定义所研究正矢平方型加减速算法的各参数曲线与时间参数的关系表达式;
[0107]
s4:实施正矢平方型加减速控制算法。
[0108]
优选的,s1中机械性能约束条件包含加速运动阶段最大加速度a
amax
、加速运动阶段最大加加速度j
amax
、减速运动阶段最大加速度a
dmax
、减速运动阶段最大加加速度j
dmax
,轨迹约束条件包含最大速度v
max
、起点速度vs、终点速度ve、轨迹总长度s
seg
。
[0109]
优选的,s2中输出时间参数有t1,t2,t3,t4,t5,t6t7,所述,义时间参数有加加速段时间长度t1=t1、匀加速段时间长度t2=t
2-t1、减加速段时间长度t3=t
3-t2、匀速段时间长度t4=t
4-t3、加减速段时间长度t5=t
5-t4、匀减速段时间长度t6=t
6-t5、减减速段时间长度t7=t
7-t6,且t1=t3、t5=t7。
[0110]
优选的,s3参数曲线包含加加速度参数、加速度参数、速度参数、位移参数,且与时间参数的关系表达式分别为:j(t)、v(t)、s(t),再构造以正矢平方函数(1-cosx)2=1-2cosx (cosx)2为核心的速度公式,则获得正矢平方型加减速算法各阶段表达式。
[0111]
优选的,正矢平方型加减速算法各阶段表达式为:
[0112]
(1)加加速运动段t∈[0,t1),各参数曲线表达式:
[0113][0114]
(2)匀加速运动段t∈[t1,t2),各参数曲线表达式:
[0115][0116]
式中:
[0117]
(3)减加速运动段t∈[t2,t3),各参数曲线表达式:
[0118][0119]
式中:v2=v1 a
amax
t2;
[0120]
(4)匀速运动段t∈[t3,t4),各参数曲线表达式:
[0121][0122]
式中:
[0123]
(5)加减速运动段t∈[t4,t5),各参数曲线表达式:
[0124][0125]
式中:v4=v
max
=v3;s4=s3 v3t4[0126]
(6)匀减速运动段t∈[t5,t6),各参数曲线表达式:
[0127][0128]
式中:
[0129]
(7)减减速运动段t∈[t6,t7),各参数曲线表达式:
[0130][0131]
式中:v6=v
5-a
dmax
t6;
[0132]
五段运动曲线时,式中:
[0133]
根据以上公式可确定各运动段参数,确定正矢平方型速度加减速算法曲线模型如图1所示。
[0134]
优选的,s4中正矢平方型加减速控制算法具体实施步骤为:
[0135]
步骤1:校验起点速度终点速度可达性;
[0136]
步骤2:匀加速运动段存在性校验;
[0137]
步骤3:匀减速运动段存在性校验;
[0138]
步骤4:匀速运动段存在性校验。
[0139]
优选的,步骤1中校验起点速度终点速度可达性的方法为:
[0140]
为避免轨迹段较短导致无法从起点速度运动到终点速度而出现速度突变的现象,综合轨迹段长度s
seg
、加速度(a
amax
和a
dmax
)和加加速度(j
amax
和j
dmax
)的约束条件,计算实际能够达到的起点速度和终点速度,并以此修正加减速输入的起点速度vs和终点速度ve,
[0141]
1)当vs=ve时,跳转步骤2;
[0142]
2)当vs<ve,综合多约束计算实际能够达到的终点速度ve;
[0143]
当仅存在加加速段和减加速段时,加速段最大位移为:
[0144][0145]
当同时存在加加速段、匀加速段和减加速段时,加速段最大位移为:
[0146][0147]
若s
seg
≥s
a3_max
,表明此时给定轨迹段长满足加减速控制要求,直接跳转到步骤2;
[0148]
若s
a2_max
≤s
seg
<s
a3_max
,表明此时轨迹段长度能够满足加减速达到用户设定最大加速度,但无法满足加减速达到用户设定终点速度,修正终点速度和实际最大速度,并跳转到步骤2;
[0149]
修正终点速度和实际最大速度表达式为:
[0150][0151]
若s
seg
<s
a2_max
,表明此时轨迹段长较短,实际最大加速度小于用户设定最大加速度a
amax
,采用盛金公式法计算最大加速度,以及修正终点速度和实际最大速度的表达式为:
[0152][0153][0154]
3)当vs>ve,综合多约束计算实际能够达到的起点速度vs;
[0155]
当仅存在加减速段和减减速段时,减速段最大位移为:
[0156][0157]
当同时存在加减速段、匀减速段和减减速段时,减速段最大位移为:
[0158][0159]
若s
seg
≥s
d3_max
,表明此时给定轨迹段长满足加减速控制要求,直接跳转到步骤2;
[0160]
若s
d2_max
≤s
seg
<s
d3_max
,表明此时轨迹段长度能够满足加减速达到用户设定最大加速度,但无法满足加减速达到用户设定终点速度,修正终点速度和实际最大速度,并跳转到步骤2;
[0161]
修正终点速度和实际最大速度表达式为:
[0162][0163]
若s
seg
<s
d2_max
,表明此时轨迹段长较短,实际最大加速度小于用户设定最大加速度a
dmax
,采用盛金公式法计算最大加速度,以及修正终点速度和实际最大速度的表达式为:
[0164]
[0165][0166]
优选的,步骤2中匀加速运动段存在性校验的方法为:
[0167]
《1》当则存在匀加速运动段,加速运动段实际可以达到的加速度即为系统输入加速运动段最大加速度,计算加加速、匀加速和减加速运动段时间长度的表达式为:
[0168][0169]
《2》当则不存在匀加速运动段,加速运动段实际可以达到的最大加速度小于系统输入加速运动阶段最大加速度,计算加加速、匀加速和减加速运动段时间长度的表达式为:
[0170][0171]
《3》根据式
③
,并结合式或式
[0172][0173]
按式计算包含加加速运动段、匀加速运动段和减加速运动段在内的加速运动段所需总位移长度sa,并跳转到步骤3。
[0174]
优选的,步骤3中匀减速运动段存在性校验的方法为:
[0175]
1》些则存在匀减速运动段,减速运动段实际可以达到的加速度即为系统输入减速运动段最大加速度,计算加减速、匀减速和减减速运动段时间长度的表达式为:
[0176][0177]
2》当则不存在匀加速运动段,加速运动段实际可以达到的最大加速度小于系统输入加速运动阶段最大加速度,计算加减速、匀减速和减减速运动段时间长度的表达式为:
[0178][0179]
3》根据式
⑦
,并结合式或式
[0180][0181]
按式计算包含加减速、匀减速和减减速运动段在内的减速运动段所需总位移长度sd,并跳转到步骤4。
[0182]
优选的,步骤4中匀速运动段存在性校验的方法为:
[0183]
当s
seg
≥sa sd,则存在匀速运动段,运行过程中实际能够达到的最大速度v
max_act
等于系统输入最大速度v
max
,计算匀速运动段运动时间长度,计算完成后结束加减速控制算法流程,
[0184]
计算匀速运动段运动时间长度表达式为:
[0185][0186]
当s
seg
<sa sd,则不存在匀速运动段,即t4=0。
[0187]
通过上述4个校验步骤,可确定正矢平方型曲线加减速控制输出的七个运动段运动时间,并且加加速度、加速度和速度均不超过系统机械性能约束,正矢曲线加减速控制算法实施步骤如图2所示。
[0188]
工作原理:是以正矢平方函数(1-cosx)2=1-2cosx cosx)2为加加速度核心推导出其他的速度公式,如结合正矢平方型加减速控制算法的具体实施的四个步骤,可确定正矢平方型曲线加减速控制输出的七个运动段运动时间,并且加加速度、加速度和速度均不超过系统机械性能约束,最终实施正矢曲线加减速控制算法。
[0189]
以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。