技术特征:
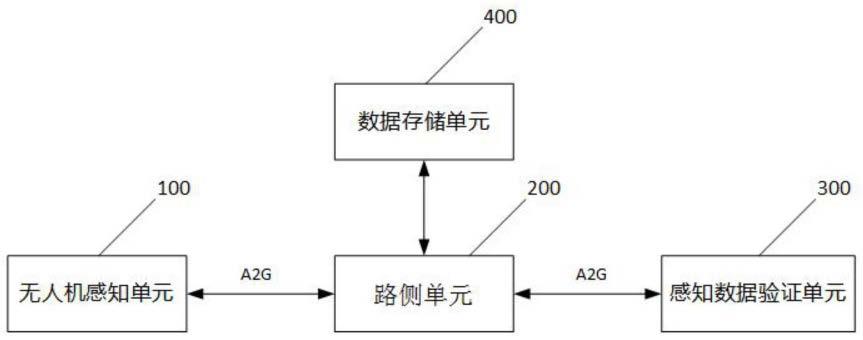
1.一种自动驾驶车联网络中无人机辅助的数据验证系统,其特征在于,包括无人机感知单元(100),路侧单元(200),感知数据验证单元(300),数据存储单元(400);所述无人机感知单元(100)通过空对地通信方式与路侧单元(200)连接;所述感知数据验证单元(300)通过空对地通信方式与路侧单元(200)连接;所述数据存储单元(400)与路侧单元(200)相连;所述无人机感知单元(100)用于感知路况信息、异常车辆信息;所述路侧单元(200)用于收集和管理验证任务,以及承担数据存储任务;所述感知数据验证单元(300)用于验证感知信息;所述数据存储单元(400)用于存储感知数据对应的验证信息,以及评判验证无人机感知单元(100)和路侧单元(200)行为的信誉和信用值。2.根据权利要求1所述自动驾驶车联网络中无人机辅助的数据验证系统,其特征在于,所述路侧单元(200)不仅要负责验证任务的管理,还充当区块链中的矿工,维护区块链。3.根据权利要求1所述自动驾驶车联网络中无人机辅助的数据验证系统,其特征在于,所述感知数据验证单元(300)的主体是验证无人机;验证无人机协作完成验证任务,诚实的验证行为将提高信誉并增加验证报酬。4.一种自动驾驶车联网络中无人机辅助的数据验证方法,其特征在于,包括以下步骤:s100.在无人机感知单元(100)中,感知无人机感知自动驾驶车联网络中的路况信息、异常车辆信息,并根据感知信息的复杂度、重要性在路侧单元(200)上发布相应的验证任务;s200.路侧单元(200)接收验证任务,招募验证无人机协作完成验证任务,以判断无人机感知数据是否正确;s300.在感知数据验证单元(300)中,验证无人机在收到验证任务之后,首先验证其格式,然后根据验证算法对感知数据进行验证;s400.路侧单元(200)接收和汇总验证无人机反馈的验证结果,分析以得到无人机感知数据的最终验证结果,并将最终验证结果通过空对地通信信道反馈给感知无人机;s500.在数据存储单元(400)中,路侧单元(200)负责将感知数据、验证结果信息上传至数据存储单元(400)。5.根据权利要求4所述自动驾驶车联网络中无人机辅助的数据验证方法,其特征在于,所述步骤s200的具体步骤为:s210.路侧单元(200)接收验证任务,并将验证任务添加到任务面板中;s220.路侧单元(200)之间实时通信以同步更新任务面板,供各处的验证无人机查阅;s230.验证无人机查阅任务面板,向路侧单元(200)请求验证任务;s240.路侧单元(200)在确认验证无人机的身份和验证任务的状态之后,向请求任务的无人机发放验证任务。6.根据权利要求4所述自动驾驶车联网络中无人机辅助的数据验证方法,其特征在于,所述步骤s500的具体步骤为:s510.路侧单元(200)将感知数据和验证结果信息打包为一个验证任务包,广播给其他的路侧单元(200);s520.所有合法注册过的路侧单元(200)和无人机投票选出的一个路侧单元(200)作为超级节点,来负责一段时间内的数据整合存储工作;s530.超级节点收集和整理各地路侧单元(200)广播的验证任务包,计算并更新无人机
的信誉和路侧单元(200)的信用,并将验证任务包,信誉和信用整合打包为一个待验证区块,并广播给所有的路侧单元(200)验证;s540.超级节点在收到超过2/3的路侧单元(200)认可后,将这一区块加入到区块链末尾,并链上前一个区块,以完成数据存储。
技术总结
本发明公开了一种自动驾驶车联网络中无人机辅助的数据验证系统及方法,系统包括无人机感知单元、路侧单元、感知数据验证单元,数据存储单元;所述无人机感知单元通过空对地通信(Air to ground,A2G)方式与路侧单元连接;所述感知数据验证单元通过A2G方式与路侧单元相连;所述数据存储单元与路侧单元相连。方法包括根据感知无人机的信誉,招募相应数量的验证无人机对感知数据验证;根据验证时间、协作评价、和验证结果建立验证无人机的信誉度;在联盟区块链根据提出的信用增强的委托权益证明进行共识,完成感知数据、信誉度和验证信息的存储,实现数据可追溯。实现数据可追溯。实现数据可追溯。
技术研发人员:许其超 赵立峰 苏洲
受保护的技术使用者:上海大学
技术研发日:2021.12.09
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。