1.本发明涉及勘测技术领域,特别涉及一种无人机航拍测绘装置。
背景技术:
2.无人机航测是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出其独特的优势,无人机与航空摄影测量相结合使得“无人机数字低空遥感”成为航空遥感领域的一个崭新发展方向,无人机航拍可广泛应用于国家重大工程建设、灾害应急与处理、国土监察、资源开发、新农村和小城镇建设等方面,尤其在基础测绘、土地资源调查监测、土地利用动态监测、数字城市建设和应急救灾测绘数据获取等方面具有广阔前景;现有的无人机航拍测绘装置在进行测绘时使用陀螺仪进行调整测绘拍摄头,由于陀螺仪容易受到风力影响,造成测绘拍摄头不稳定,从而无法对测绘拍摄头进行安全防护,造成财产损失,并且在对无人机进行降落时,没有减震装置,从而造成降落损坏,为此,提出一种无人机航拍测绘装置。
技术实现要素:
3.有鉴于此,本发明实施例希望提供一种无人机航拍测绘装置,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
4.本发明实施例的技术方案是这样实现的:一种无人机航拍测绘装置,包括飞行测绘组件、稳定陀螺仪组件和减震组件,飞行测绘组件将稳定陀螺仪组件与减震组件升至空中,便于稳定陀螺仪组件进行观察测绘,稳定陀螺仪组件用于在稳定测绘拍摄的角度和质量,又能在飞行测绘组件带动稳定陀螺仪组件向下移动时,便于对拍摄测绘的设备进行收纳保护,飞行测绘组件带动减震组件向地面移动时,从而使减震组件进行减震处理,提高对本装置的保护,飞行测绘组件的下方分别安装有稳定陀螺仪组件与减震组件。
5.进一步优选的,所述稳定陀螺仪组件包括u型板体、差速电机、第一电动推杆、第一滑块、方形通孔板体、方形板体、第二电动推杆、摄像测绘头和固定板体;测绘机身的下表面安装于差速电机的上表面,差速电机的输出轴安装于u型板体的上表面,u型板体的内侧壁对称设有两个第一滑块,两个第一滑块相邻的一侧通过轴承转动连接于方形通孔板体的外侧壁,方形通孔板体的内侧壁通过轴承转动连接于方形板体的外侧壁,固定板体共设置两个,两个固定板体的上表面对称安装于方形板体的下表面,固定板体相邻的一侧通过轴承转动连接于摄像测绘头的外侧壁。
6.进一步优选的,u型板体的内侧壁对称开设有两个第一滑槽,第一滑槽的内侧壁滑动连接于第一滑块的外侧壁,第一电动推杆共设置两个,两个第一电动推杆的上表面对称安装于u型板体的内侧底壁,第一电动推杆的活塞杆安装于第一滑块的上表面。
7.进一步优选的,方形板体的下表面通过轴承转动连接于第二电动推杆的上表面,第二电动推杆的活塞杆通过销轴铰接于摄像测绘头的上表面。
8.进一步优选的,方形通孔板体的下表面对称安装有两个第一动平衡校准块,方形板体的下表面对称安装有两个第二动平衡校准块。
9.进一步优选的,飞行测绘组件包括测绘机身、连接板体、飞行扇叶和流线形板体;连接板体共设置四个,四个连接板体相邻的一侧相互对称安装于测绘机身的外侧壁,飞行扇叶共设置四个,四个飞行扇叶的下表面安装于四个连接板体的上表面。
10.进一步优选的,测绘机身的上表面安装于流线形板体的下表面。
11.进一步优选的,减震组件包括圆形筒体、圆形杆体、弹簧和橡胶垫;圆形筒体共设置四个,四个圆形筒体的顶端安装于四个连接板体的下表面,圆形筒体的内侧壁贴合于圆形杆体的外侧壁,圆形杆体的底端安装于橡胶垫的上表面,圆形杆体的顶端安装于弹簧的底端,弹簧的底端安装于连接板体的下表面。
12.进一步优选的,圆形筒体的内侧壁对称开设有四个第二滑槽,第二滑槽的内侧壁滑动连接有第二滑块,四个第二滑块相邻的一侧相互对称安装于圆形杆体的外侧壁。
13.本发明实施例由于采用以上技术方案,其具有以下优点:一、本发明通过u型板体、方形通孔板体、方形板体、固定板体、第一动平衡校准块和第二动平衡校准块的设置,在飞行扇叶带动测绘机身上飞行受到风力影响,使测绘机身的位置发生晃动时,采用陀螺仪的功能,用以保证摄像测绘头使用的平稳性,提高航拍测绘的质量与效率。
14.二、本发明通过差速电机与第二电动推杆的设置,便于改变摄像测绘头拍摄的角度问题,达到无人机航拍测绘区域全覆盖的目的,进一步提高测绘的效率。
15.三、本发明通过圆形筒体、圆形杆体、弹簧的设置,便于测绘机身降落时,通过弹簧的弹性势能对圆形杆体的冲击力进行缓冲,从而提高对本装置降落保护的能力,提高本装置使用的寿命。
16.四、本发明通过启动第一电动推杆,使第一电动推杆的活塞杆带动第一滑块在第一滑槽内移动时,第一滑块带动方形通孔板体、方形板体与摄像测绘头移动至u型板体内,在测绘机身降落时,可以有效对摄像测绘头进行安全防护,避免地面的石块对摄像测绘头撞击而损坏,从而规避财产的损失。
17.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
附图说明
18.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
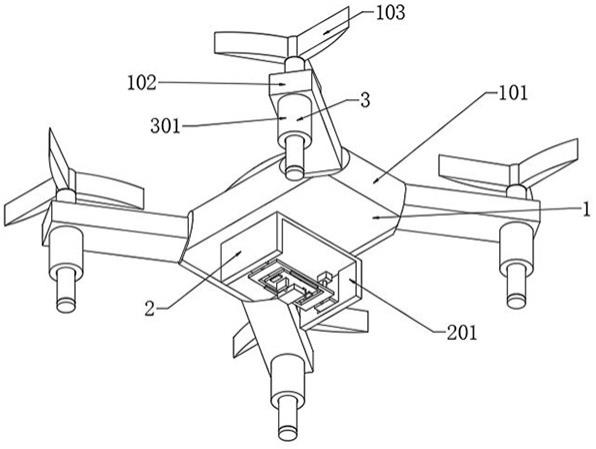
19.图1为本发明的结构图;图2为本发明的俯视结构图;
图3为本发明的侧视结构图;图4为本发明的稳定陀螺仪组件内部结构图;图5为本发明的稳定陀螺仪组件内部仰视结构图;图6为本发明图5的a区放大结构图;图7为本发明的减震组件内部结构图。
20.附图标记:1、飞行测绘组件;101、测绘机身;102、连接板体;103、飞行扇叶;104、流线形板体;2、稳定陀螺仪组件;201、u型板体;202、差速电机;203、第一电动推杆;204、第一滑块;205、方形通孔板体;206、方形板体;207、第二电动推杆;208、摄像测绘头;209、固定板体;3、减震组件;301、圆形筒体;302、圆形杆体;303、弹簧;304、橡胶垫;4、第一滑槽;5、第一动平衡校准块;6、第二动平衡校准块;7、第二滑槽;8、第二滑块。
具体实施方式
21.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
22.下面结合附图对本发明的实施例进行详细说明。
23.实施例一如图1-7所示,本发明实施例提供了一种无人机航拍测绘装置,包括飞行测绘组件1、稳定陀螺仪组件2和减震组件3,飞行测绘组件1将稳定陀螺仪组件2与减震组件3升至空中,便于稳定陀螺仪组件2进行观察测绘,稳定陀螺仪组件2用于在稳定测绘拍摄的角度和质量,又能在飞行测绘组件1带动稳定陀螺仪组件2向下移动时,便于对拍摄测绘的设备进行收纳保护,飞行测绘组件1带动减震组件3向地面移动时,从而使减震组件3进行减震处理,提高对本装置的保护,飞行测绘组件1的下方分别安装有稳定陀螺仪组件2与减震组件3。
24.实施例二如图1-7所示,本发明实施例提供了稳定陀螺仪组件2包括u型板体201、差速电机202、第一电动推杆203、第一滑块204、方形通孔板体205、方形板体206、第二电动推杆207、摄像测绘头208和固定板体209;测绘机身101的下表面安装于差速电机202的上表面,差速电机202的输出轴安装于u型板体201的上表面,u型板体201的内侧壁对称设有两个第一滑块204,两个第一滑块204相邻的一侧通过轴承转动连接于方形通孔板体205的外侧壁,方形通孔板体205的内侧壁通过轴承转动连接于方形板体206的外侧壁,固定板体209共设置两个,两个固定板体209的上表面对称安装于方形板体206的下表面,固定板体209相邻的一侧通过轴承转动连接于摄像测绘头208的外侧壁,通过u型板体201、方形通孔板体205、方形板体206、第二电动推杆207、摄像测绘头208相互通过轴承转动连接,用于对摄像测绘头208的位置进行调整位置,其中固定板体209的设置,既能对摄像测绘头208的位置进行固定,又能对摄像测绘头208的位置进行调节。
25.在一个实施例中,u型板体201的内侧壁对称开设有两个第一滑槽4,第一滑槽4的内侧壁滑动连接于第一滑块204的外侧壁,第一电动推杆203共设置两个,两个第一电动推
杆203的上表面对称安装于u型板体201的内侧底壁,第一电动推杆203的活塞杆安装于第一滑块204的上表面,通过将第一滑块204在第一滑槽4内滑动,既能辅助方形通孔板体205的位置进行移动,从而方便方形通孔板体205带动摄像测绘头208的位置进行调整,其中第一电动推杆203的设置,第一电动推杆203的活塞杆带动第一滑块204在第一滑槽4内上下滑动,进一步辅助第一滑块204的位置进行移动,从而辅助方形通孔板体205的位置进行移动。
26.在一个实施例中,方形板体206的下表面通过轴承转动连接于第二电动推杆207的上表面,第二电动推杆207的活塞杆通过销轴铰接于摄像测绘头208的上表面,通过启动第二电动推杆207带动摄像测绘头208的上下角度进行调节,提高勘测的范围。
27.在一个实施例中,方形通孔板体205的下表面对称安装有两个第一动平衡校准块5,方形板体206的下表面对称安装有两个第二动平衡校准块6,通过第一动平衡校准块5的设置,用于对方形通孔板体205的位置进行调整平衡,其中第二动平衡校准块6的设置,用于对方形板体206的位置进行调整平衡,从而对摄像测绘头208的位置进行平衡调节。
28.实施例三如图1-7所示,本发明实施例提供了飞行测绘组件1包括测绘机身101、连接板体102、飞行扇叶103和流线形板体104;连接板体102共设置四个,四个连接板体102相邻的一侧相互对称安装于测绘机身101的外侧壁,飞行扇叶103共设置四个,四个飞行扇叶103的下表面安装于四个连接板体102的上表面,通过飞行扇叶103的设置,便于带动测绘机身101进行升空。
29.在一个实施例中,测绘机身101的上表面安装于流线形板体104的下表面,通过流线形板体104的设置,用于方便对空气进行导流,从而稳定测绘机身101的位置。
30.实施例四如图1-7所示,本发明实施例提供了减震组件3包括圆形筒体301、圆形杆体302、弹簧303和橡胶垫304;圆形筒体301共设置四个,四个圆形筒体301的顶端安装于四个连接板体102的下表面,圆形筒体301的内侧壁贴合于圆形杆体302的外侧壁,圆形杆体302的底端安装于橡胶垫304的上表面,圆形杆体302的顶端安装于弹簧303的底端,弹簧303的底端安装于连接板体102的下表面,通过弹簧303的设置,便于将圆形杆体302与地面的反冲力进行抵消,从而进行对测绘机身101减震保护,其中橡胶垫304的设置,用于增强圆形杆体302与地面的摩擦力,提高对测绘机身101的稳定性。
31.在一个实施例中,圆形筒体301的内侧壁对称开设有四个第二滑槽7,第二滑槽7的内侧壁滑动连接有第二滑块8,四个第二滑块8相邻的一侧相互对称安装于圆形杆体302的外侧壁,通过将第二滑块8在第二滑槽7内滑动,既能辅助圆形杆体302进行移动,又能对圆形杆体302的位置进行限位。
32.本发明在工作时:通过遥控器控制测绘机身101内的控制模块,从而使测绘机身101的控制模块启动飞行扇叶103,飞行扇叶103的转动带动飞行测绘组件1、稳定陀螺仪组件2和减震组件3进行升空,此时控制模块启动第一电动推杆203,第一电动推杆203的活塞杆带动第一滑块204在第一滑槽4向下移动,第一滑槽4带动方形通孔板体205、方形板体206、摄像测绘头208和固定板体209从u型板体201内移出,当高空的气流紊乱时,会导致测绘机身101的位置不稳定,测绘机身101带动u型板体201进行位置倾斜,此时u型板体201上
的方形通孔板体205通过轴承与第一动平衡校准块5进行位置调节,使方形通孔板体205的位置进行平衡,此时方形通孔板体205上的方形板体206通过轴承与第二动平衡校准块6的设置,便于对方形板体206的位置进行稳定调节,当需要对摄像测绘头208的圆周角度进行调节时,其中差速电机202,差速电机202带动u型板体201的位置进行转动,u型板体201依次通过方形通孔板体205、方形板体206和固定板体209带动摄像测绘头208进行圆周转动,当需要对摄像测绘头208进行上下角度调节时,启动第二电动推杆207,第二电动推杆207的输出轴带动摄像测绘头208进行角度调节,当需要对本装置进行降落时,启动第一电动推杆203,第一电动推杆203的活塞杆带动第一滑块204向上移动,第一滑块204依次带动方形通孔板体205、方形板体206、第二电动推杆207、摄像测绘头208和固定板体209移动至u型板体201内,当测绘机身101带动圆形筒体301与圆形杆体302进行降落,从而使橡胶垫304贴合地面,从而使橡胶垫304与地面的反冲力通过圆形杆体302引导至弹簧303上产生形变,从而对圆形杆体302上的反冲力进行释放,提高对本装置减震的效果。
33.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
