1.本实用新型涉及救援设备技术领域,尤其是涉及一种行走机构及仿生搜救机器人。
背景技术:
2.地震、海啸等自然灾害严重威胁着人类的生命与财产安全。灾难发生后的72h为黄金救援时间,但受到灾害现场的非结构化环境的影响,救援复杂程度也会增加。救援人员难以快速、高效、安全地进行工作,使救援任务往往超出了救援人员的能力范围,因此,救援机器人已经成为一个重要的发展方向。用机器人辅助或代替人,执行救援任务,在维护公共安全和抢险救灾中能发挥重要作用。
3.在国内,救灾机器人的研究起步较晚,但受到的重视程度很高。近年来也取得了很大进展。其中,履带式搜救机器人通过履带行走,能适应雪地、泥泞、沼泽等特殊路面,受到了广泛关注和应用。但本技术人发现现有技术至少存在以下技术问题:
4.现有履带式搜救机器人在障碍物体积较大或地形复杂环境下无法高效工作,甚至无法到达指定区域,进而无法完成搜救任务。
技术实现要素:
5.本实用新型的目的在于提供一种行走机构及具有其的仿生搜救机器人,至少解决现有技术中存在的履带式搜救机器人在障碍物体积较大或地形复杂环境下无法高效可靠工作的技术问题。本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
6.为实现上述目的,本实用新型提供了以下技术方案:
7.本实用新型提供的一种行走机构,包括驱动装置、传动结构和行走腿,所述行走腿通过所述传动结构与所述驱动装置传动连接;且所述行走腿包括履带轮机构,在所述驱动装置的带动下所述行走机构能够采用足式行进和/或履带式行进。
8.可选地,所述行走腿包括大腿部和小腿部,所述履带轮机构形成了所述小腿部;所述驱动装置包括第一驱动组件和第二驱动组件,所述大腿部与所述第一驱动组件传动连接;所述小腿部可转动设置于所述大腿部的底侧,并与所述第二驱动组件传动连接。
9.可选地,所述履带轮机构包括支架、履带和两个履带轮,两个所述履带轮以及所述第二驱动组件均设置于所述支架;所述履带套设于两个所述履带轮并与其相啮合传动,所述第二驱动组件与所述履带轮传动连接。
10.可选地,所述第二驱动组件包括电机。
11.可选地,所述第一驱动组件包括小腿升降电机、行走腿前后摆动电机和行走腿内收外展电机,所述小腿升降电机与所述履带轮机构传动连接,所述行走腿前后摆动电机和所述行走腿内收外展电机分别与所述行走腿传动连接。
12.可选地,所述传动结构包括升降传动组件,所述升降传动组件包括相铰接的摆臂
和连杆,所述摆臂远离所述连杆的上端与所述小腿升降电机传动连接;所述连杆的底端可转动连接于所述支架。
13.本实用新型提供的一种仿生搜救机器人,包括控制模块、传感器模块和以上任一所述的行走机构。
14.可选地,所述仿生搜救机器人包括四个所述行走机构。
15.可选地,所述传感器模块包括二氧化碳检测模块、红外测距模块和气体检测模块。
16.可选地,所述仿生搜救机器人还包括gps北斗模块和人机交互模块。
17.本实用新型提供的行走机构及具有其的仿生搜救机器人,该行走机构包括驱动装置、传动结构和行走腿,行走腿包括履带轮机构,在驱动装置的带动下行走机构能够可选地采用足式行进和/或履带式行进方式,仿生搜救机器人采用该行走机构后,在障碍物较少路段采用履带式行进方式,当遇到台阶、体积较大障碍物时可切换至足式配合履带式的行进方式以跨越障碍物,从而适用于各种复杂救援环境,能够穿过复杂地形,快速顺利完成搜救任务,提高了搜救效率,为救援争取到宝贵的时间。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
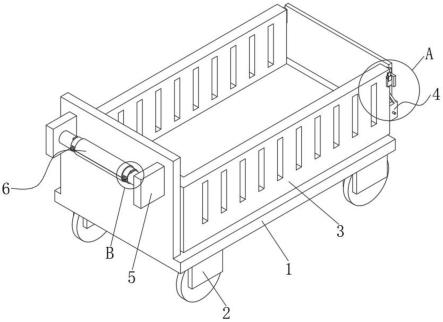
19.图1是本实用新型具体实施方式提供的一种行走机构的立体结构示意图;
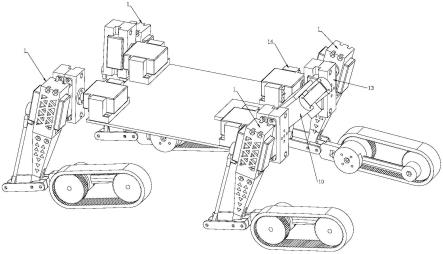
20.图2是本实用新型具体实施方式提供的一种仿生搜救机器人的立体结构示意图。
21.图中1、行走腿;11、大腿部;12、小腿部;2、履带;3、履带轮;4、第二驱动组件;5、支架;6、连杆;7、摆臂;8、小腿升降电机;9、舵盘;10、摄像头模块;13、行走腿前后摆动电机;14、行走腿内收外展电机。
具体实施方式
22.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
23.如图1所示,本实用新型提供了一种行走机构,包括驱动装置、传动结构和行走腿1,行走腿1通过传动结构与驱动装置传动连接;且行走腿1包括履带轮机构,在驱动装置的带动下行走机构能够采用足式行进和/或履带式行进。
24.在驱动装置的带动下行走机构能够可选地采用足式行进或履带式行进方式,仿生搜救机器人采用该行走机构后,在障碍物较少路段采用履带式行进方式,当遇到台阶、体积较大障碍物时可切换至足式结合履带式的行进方式以跨越障碍物,从而适用于各种复杂救援环境,能够穿过复杂地形,快速顺利完成搜救任务,提高了搜救效率,为救援争取到宝贵的时间。
25.作为可选地实施方式,行走腿1包括大腿部11和小腿部12,履带轮机构形成了小腿
部12;驱动装置包括第一驱动组件和第二驱动组件4,大腿部11与第一驱动组件传动连接;小腿部12可转动设置于大腿部11的底侧,并与第二驱动组件4传动连接。
26.履带轮机构形成了行走腿1的小腿部12,通过驱动装置控制小腿部12的升降并配合行走腿1的前后摆动,实现足式行进;通过驱动装置控制履带轮机构的履带轮3转动,实现履带式行进。
27.作为可选地实施方式,履带轮机构包括支架5、履带2和两个履带轮3,两个履带轮3以及第二驱动组件4均设置于支架5;履带2套设于两个履带轮3并与其相啮合传动,第二驱动组件4与履带轮3传动连接。
28.作为可选地实施方式,第二驱动组件4包括电机。电机安装在支架5上,电机的输出轴与两个履带轮3的同步转轴传动连接,以驱动机器人实现履带式行进。
29.作为可选地实施方式,第一驱动组件包括小腿升降电机8、行走腿前后摆动电机13和行走腿内收外展电机14,小腿升降电机8与履带轮机构传动连接,行走腿前后摆动电机13和行走腿内收外展电机14分别与行走腿1传动连接。
30.具体地,小腿升降电机8、行走腿1前后摆动电机和行走腿1内收外展电机均为伺服电机(舵机)。
31.小腿升降电机8控制履带轮机构(小腿部12)实现升降动作;行走腿前后摆动电机13实现行走腿1沿其大腿部11髋关节的转动,实现迈步动作;行走腿内收外展电机14驱动行走腿1在垂直于行进方向的水平方向(左右方向)上平移动作,实现一排两个行走腿1之间间距的调整,便于避开障碍物。
32.作为可选地实施方式,传动结构包括升降传动组件,升降传动组件包括相铰接的摆臂7和连杆6,摆臂7远离连杆6的上端与小腿升降电机8传动连接;连杆6的底端可转动连接于支架5。
33.如图2所示,本实用新型还提供了一种履带式四足仿生搜救机器人,包括控制模块、传感器模块和以上任一的行走机构。仿生搜救机器人包括四个行走机构。
34.履带式四足仿生搜救机器人使用stm32系列芯片作为主控,其程序由三大部分组成,即运动部分、传感器模块、人机交互。使机器人摆脱传统束缚,脱离步伐不稳的缺点,无论走在平路、坎坷不平的道路亦或是陡坡上,只要根据运动部分进行判别,能最大化消除道路方面对机器人的影响,并且操纵的人可以随时随地根据机器人实时返回的画面进行调整并有效防止由于机器人或者余震对被困者带来的危险。
35.运动部分,主控芯片输出pwm波来驱动舵机、电机转动,主控会根据收到的指令来确定是以足式前进还是以轮式前进。当其以轮式前进时,四条小腿会弯曲与地面平行,这时电机转动。以足式前进时,舵机转动,按照预设的步态行进。同时此款机器人配备有陀螺仪,可根据陀螺仪反馈的数据,用pid自控算法,实现机器人的自稳功能。
36.传感器模块,传感器主要使用的是二氧化碳检测模块,当二氧化碳浓度高于预设阀值时,向主控反馈信号,主控再向救援人员反馈,即此处有疑似生命体。同时搭配了气体检测模块,对周围环境进行初步的检测和判断,让救援人员能更好判断受害者周身的情况。红外测距模块,利用超声波,测得障碍物的位置。测得前方有障碍时可以自动避障或向救援人员反馈有障碍,可以更好的保护机器人免受障碍损伤。
37.gps北斗模块(atk1218-bd),该模块通过stm32主板驱动,具有实时监测搜救机器
人位置,并在需要时实时传输数据至软件平台的功能。用于应对在复杂且无蓝牙或移动网络信号的极端环境中,仍能准确定位机器人及探寻目标的情况,同时能够标记机器人移动轨迹,方便于后期的人工数据分析环节。
38.人机交互,采用zigbee协议的相关测试系统组成。zigbee无线通信技术应用于小范围的基于无线通信的控制及自动化等领域,能够实现多种不同数字设备相互间的无线组网,使它们实现相互通信,或者接入因特网,由zigbee无线通信技术保持高效率传输信号,由终端反馈实时高清图像,由图传系统反馈的信息是救援人员操纵机器人和判断受灾人员安全的重要依据。并且完善网络模块nb-iot通过ld3320语音模块实现实时语音通讯,实现操控者与被困人员的实时交流
39.对于被困人员的搜索主要是通过二氧化碳传感器及图传系统。由救援人员直接操纵机器人,根据机器人身上的摄像头所反馈回来的信息,观察建筑的内部受损情况,同时进行被困人员的搜索工作,当局部二氧化碳浓度高于预设阀值,机器人停下反馈信号,搜救人员可利用图传系统对被困人员所处环境进行判断、观测被困人员健康状况以做出相应的救援计划。
40.机械部分,本款四足机器人每条腿均能实现三个自由度的运动,小腿装备为履带轮结构,能够以轮式行进。足式行进具有一定的越障能力,这也是优于现有的履带式机器人的地方,可以到达传统式履带式机器人所不能到达的地方,提高对受损建筑的搜索程度。
41.本产品具有的传感器模块功能,用户可以通过设置阈值来判别主控返回的信号状态确定机器人所在位置是否有生命体存在,也可以用红外测距模块或者利用超声波模块,测得障碍物的位置。测得前方有障碍时可以自动避障或向救援人员反馈有障碍,可以更好的保护机器人免受障碍损伤。
42.四足搜救机器人还包括一个摄像头模块10和运动模块。动作关系说明:由于四只腿的结构相似,以一个行走机构为例,足式运动时:当小腿升降舵机开始运转的时候,通过舵盘9带动着连杆6,使得小腿部12抬起;当行走腿前后摆动舵机运转的时候,整个大腿部11分开始运动。当行走腿内收外展舵机运转时,控制腿部向内收或者是向外放。履带式行进:当作为第二驱动组件4的电机转动时,带动着履带轮机构开始运动,配合足式运动完成跨越障碍的任务。(主控模块和其他传感器模块由于是成模块化的套件,故未在图中示出。)
43.履带式四足仿生搜救机器人的优势体现在:(1)快速搜索幸存者,并提供信息给救援人员,方便施救;(2)随时监视废墟的变化,防止发生倒塌危及救援人员。集采集数据,环境建模,搜索,实时通讯,为一体的多功能产品。同时也为救援人员进入震后危房提供了一定的安全保障。为了解决四足机器人无法适应复杂地形的问题,我们在运动模块中采用四足机械结构结合履带式行走的方式;传感器模块采用了二氧化碳传感器,当二氧化碳浓度高于预设阀值时,向主控反馈信号,主控再向救援人员反馈,即此处有疑似生命体。同时能够标记机器人移动轨迹,方便于后期的人工数据分析,使用了gps北斗模块(atk1218-bd),该模块通过stm32主板驱动,具有实时监测搜救机器人位置,并在需要时实时传输数据至软件平台的功能。该模块用于应对在复杂且无蓝牙或移动网络信号的极端环境中,仍能准确定位机器人及探寻目标的情况。人机交互模块由采用了zigbee协议的相关测试系统组成。zigbee无线通信技术应用于小范围的基于无线通信的控制及自动化等领域,能够实现多种不同数字设备相互间的无线组网,使它们实现相互通信,或者接入因特网。
44.本实用新型采用四足 履带的运动结构,可适应复杂的搜救环境,提高搜救效率;通过携带多种传感器,实现废墟内的图、声、气、温等检测,有效锁定受害者的位置;机器人救援可以辅助或替代救援人员,避免二次倒塌所带来的伤害,降低救援人员的风险。
45.在本实用新型的描述中,需要说明的是,除非另有说明,
″
多个
″
的含义是两个或两个以上;术语
″
上
″
、
″
下
″
、
″
左
″
、
″
右
″
、
″
内
″
、
″
外
″
、
″
前端
″
、
″
后端
″
、
″
头部
″
、
″
尾部
″
等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语
″
第一
″
、
″
第二
″
、
″
第三
″
等仅用于描述目的,而不能理解为指示或暗示相对重要性。
46.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语
″
安装
″
、
″
相连
″
、
″
连接
″
应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可视具体情况理解上述术语在本实用新型中的具体含义。
47.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。