1.本实用新型涉及一种精加工工作站,具体涉及带有视觉检测功能的隧道炉加工件精加工工作站。
背景技术:
2.隧道窑是由耐火材料、保温材料和建筑材料砌筑而成的在内装有窑车等运载工具的与隧道相似的窑炉,是现代化的连续式烧成的热工设备。碳化硅陶瓷防弹材料在经过隧道炉烧结后,还需要进行打磨以及视觉检测,以能够实现后续的匹配安装,现有机构在夹持碳化硅材料的时候,需要特定的模具进行夹持,导致难以使用。
技术实现要素:
3.为解决上述技术问题,本实用新型的目的是提供一种带有视觉检测功能的隧道炉加工件精加工工作站。
4.本实用新型的技术方案如下:
5.带有视觉检测功能的隧道炉加工件精加工工作站,其特征在于:
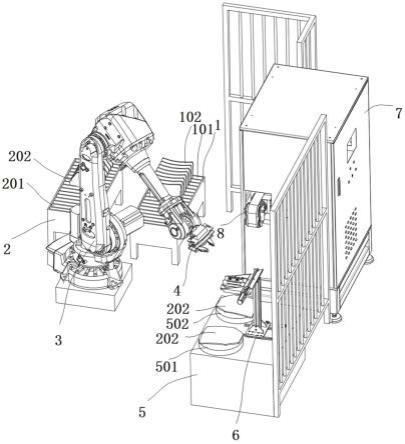
6.包括机器人(3),所述机器人(3)的驱动端连接有夹取机构(4),所述夹取机构(4)用于夹取待加工件(102);所述机器人(3)一侧设置有打磨工作站(7),所述打磨工作站(7)内设置有通过机械结构驱动的皮带式打磨机(8);所述打磨工作站(7)一侧还设置有检测出台(5),所述检测台(5)上设置有用于放置成品件(202)的第一旋转台(501)和第二旋转台(502),所述检测台(5)上还设置有视觉检测机构(6);
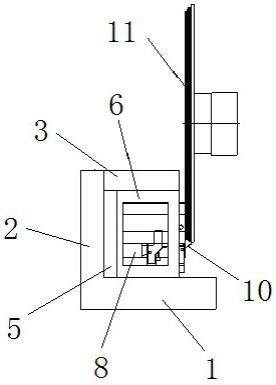
7.所述视觉检测机构(6)包括固定设置到所述检测台(5)上的一组滑轨(601),所述滑轨(601)上滑动设置有滑块(602),所述滑块(602)上滑动设置有安装座(603),所述检测台(5)上还设置有固定件(604),所述固定件(604)内设置有气缸(605),所述气缸(605)的驱动端连接所述安装座(603),所述安装座(603)上设置有竖板(606),所述竖板(606)上设置有横板(607),所述横板(607)上设置有丝杆机构(608),所述丝杆机构(608)的驱动端连接有检测安装板(6010),所述检测安装板(6010)上设置有多个摄像头。
8.进一步的,所述丝杆机构(608)和所述滑轨(601)垂直。
9.进一步的,所述检测安装板(6010)下部还设置有光源(6012)。
10.进一步的,所述摄像头(6011)的数量为四个。
11.进一步的,所述夹取机构(4)包括平行设置的一组安装板(401),所述安装板(401)的侧面连接到所述机器人(3)的驱动端,所述安装板(401)内安装有旋转电机(402),所述旋转电机(402)的驱动端端面上还设置有滑轨板(403),所述滑轨板(403)上设置有滑槽(4031),所述滑轨板(403)上套设滑动连接有两个夹爪(404),所述旋转电机(402)的驱动端连接有转盘(405),所述转盘(405)上转动连接有两个驱动臂(406)的一端,两个驱动臂(406)的另一端分别转动连接到一个夹爪(404)上。
12.进一步的,所述夹爪(404)的内侧设置有橡胶凹槽(4041)。
13.进一步的,还包括第一放置箱(1),所述第一放置箱(1)内设置有多个平行设置的第一凹槽(101),所述第一凹槽(101)用于待加工件(102)。
14.进一步的,还包括第二放置箱(2),所述第二放置箱(2)内设置有多个平行设置的第二凹槽(201),所述第二凹槽(201)用于成品件(202)。
15.借由上述方案,本实用新型至少具有以下优点:
16.本装置能够通过夹取机构方便对待加工件进行夹取,只需通过一个电机驱动即可实现。
17.本装置能够通过视觉检测机构对成品件进行视觉检测,能够将打磨不合格的产品挑出。
18.本装置视觉检测机构能够实现两个方向的移动,以实现对两个工位上的成品件的检测。
19.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
20.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某个实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
21.图1是本实用新型的结构示意图;
22.图2是本实用新型夹取机构的结构示意图;
23.图3是本实用新型视觉检测机构的结构示意图;
24.图中:
25.1-第一放置箱;101-第一凹槽;102-待加工件;
26.2-第二放置箱;201-第二凹槽;202-成品件;
27.3-机器人;
28.4-夹取机构;401-安装板;402-旋转电机;403-滑轨板;4031-滑槽;404-夹爪;4041-橡胶凹槽;405-转盘;406-驱动臂;
29.5-检测台;501-第一旋转台;502-第二旋转台;
30.6-视觉检测机构;601-滑轨;602-滑块;603-安装座;604-固定件;605-气缸;606-竖板;607-横板;608-丝杆机构;609-上安装板;6010-检测安装板;6011-摄像头;6012-光源;
31.7-打磨工作站;8-打磨机。
具体实施方式
32.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
33.参见图1-图3,本实用新型一较佳实施例所述的带有视觉检测功能的隧道炉加工
件精加工工作站,包括机器人3,所述机器人3的驱动端连接有夹取机构4,所述夹取机构4用于夹取待加工件102,碳化硅陶瓷防弹材料为隧道炉烧结加工后的材料。
34.所述机器人3一侧设置有打磨工作站7,所述打磨工作站7内设置有通过机械结构驱动的皮带式打磨机8,该机构为现有技术中常见的打磨装置。
35.所述打磨工作站7一侧还设置有检测出台5,所述检测台5上设置有用于放置成品件202的第一旋转台501和第二旋转台502,具体通过设置在检测台5底部的两个电机,驱动两个旋转台的转动,旋转台的上部一般设置有橡胶垫,增加摩擦力。
36.所述检测台5上还设置有视觉检测机构6,所述视觉检测机构6包括固定设置到所述检测台5上的一组滑轨601,所述滑轨601上滑动设置有滑块602,所述滑块602上滑动设置有安装座603,所述检测台5上还设置有固定件604,所述固定件604内设置有气缸605,所述气缸605的驱动端连接所述安装座603,所述安装座603上设置有竖板606,所述竖板606上设置有横板607,所述横板607上设置有丝杆机构608,所述丝杆机构608的驱动端连接有检测安装板6010,所述检测安装板6010上设置有多个摄像头。所述丝杆机构608和所述滑轨601垂直。所述检测安装板6010下部还设置有光源6012。所述摄像头6011的数量为四个。
37.视觉检测机构中通过多个摄像头能够实现对旋转台上成品件202进行检测,由于旋转台有两个,视觉检测机构设置了底部的一组滑轨,通过底部的滑轨用于调整摄像头的前后位置,以适应每一个旋转台上成品件202的位置,设置的丝杆机构608能够驱动摄像头在两个旋转台之间来回移动,以实现对两个旋转台上的成品件202的检测。摄像头本身连接外部的检测设备,通过摄像头采集的图像和检测设备中预设的图像进行对比,以实现对成品件202的表面光学检测。
[0038]-所述夹取机构4包括平行设置的一组安装板401,所述安装板401的侧面连接到所述机器人3的驱动端,所述安装板401内安装有旋转电机402,所述旋转电机402的驱动端端面上还设置有滑轨板403,所述滑轨板403上设置有滑槽4031,所述滑轨板403上套设滑动连接有两个夹爪404,所述旋转电机402的驱动端连接有转盘405,所述转盘405上转动连接有两个驱动臂406的一端,两个驱动臂406的另一端分别转动连接到一个夹爪404上。所述夹爪404的内侧设置有橡胶凹槽4041。
[0039]
通过旋转电机402的驱动,能够实现通过连个驱动臂带动两个夹爪的相互靠近或者远离,能够实现对待加工件102的夹紧或者放松。
[0040]-还包括第一放置箱1,所述第一放置箱1内设置有多个平行设置的第一凹槽101,所述第一凹槽101用于待加工件102。
[0041]-还包括第二放置箱2,所述第二放置箱2内设置有多个平行设置的第二凹槽201,所述第二凹槽201用于成品件202。
[0042]
本实用新型的工作原理如下:
[0043]
将待加工件102放入到第一凹槽101中,机器人3驱动夹取机构4到待加工件102的上方,然后通过夹取机构4夹取一个待加工件102,通过机器人3移动到打磨机8上进行打磨,然后在通过机器人3将打磨后的成品件202放入到旋转台上,驱动视觉检测机构的摄像头移动到成品件202的上方进行视觉检测,检测合格后的成品件202放入到第二放置箱中。
[0044]
本装置具有如下优点:
[0045]
本装置能够通过夹取机构方便对待加工件进行夹取,只需通过一个电机驱动即可
实现。
[0046]
本装置能够通过视觉检测机构对成品件进行视觉检测,能够将打磨不合格的产品挑出。
[0047]
本装置视觉检测机构能够实现两个方向的移动,以实现对两个工位上的成品件的检测。
[0048]
以上所述仅是本实用新型的优选实施方式,并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。