1.本实用新型涉及波前传感技术领域,特别涉及一种用于白天自然导星自适应光学系统中的棱锥波前传感器。
背景技术:
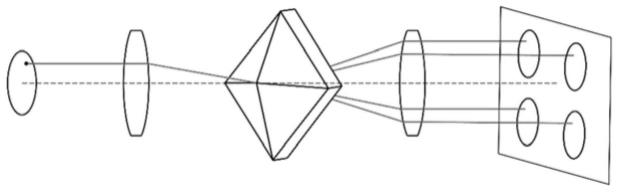
2.自适应光学是一种通过校正波前误差来提升光学成像质量的光学技术。作为自适应光学中的前端重要环节,波前传感技术主要为自适应光学系统实时测量由大气湍流等因素导致的波前像差,并为波前处理器提供波前信号。棱锥波前传感器是一种由天文学家roberto ragazzoni于1996年首次提出的新型波前传感技术,它主要在自适应光学系统中实现波前探测,目前已经应用于多个世界级的地基大口径天文望远镜的自适应光学系统中。棱锥波前传感器的光学结构如图1所示。
3.在天文探测方面,地基大口径望远镜的自适应光学系统中的棱锥波前传感器往往在夜间工作,并使用自然导星作为波前参考光源。在白天工作的情况下,用于白天自然导星自适应光学系统的棱锥波前传感器的光学结构如图2所示,所得到的目标和背景混合信号图像如图3所示,令入射信号只有目标信号,得到的目标信号图像如图4所示。根据图3和图4的对比可以明显看出,光瞳像中相对更弱的目标信号被强天光背景信号覆盖,无法提取出目标的有效信息,从而导致棱锥波前传感器在白天自然导星自适应光学中的应用受到极大限制。
技术实现要素:
4.本实用新型的目的是为了克服已有技术的缺陷,提出一种用于白天自然导星自适应光学系统中的棱锥波前传感器,将角锥棱镜和微透镜阵列相结合,实现天光背景信号与目标信号的有效分离,并利用天光消除算法提取出有效目标信号,实现棱锥波前传感器在白天自然导星自适应光学系统中的的应用。
5.为实现上述目的,本实用新型采用以下具体技术方案:
6.本实用新型提供的棱锥波前传感器,包括沿光束传播方向依次设置的第一会聚透镜、视场光阑、角锥棱镜、第二会聚透镜和探测相机,角锥棱镜的顶点位于第一会聚透镜的焦点处,探测相机的探测平面共轭于角锥棱镜的顶点所在的平面;在第二会聚透镜与探测相机之间设置有微透镜阵列,微透镜阵列用于对探测相机上的目标信号与天光背景信号进行有效分离。
7.优选地,探测相机对应于角锥棱镜各个面形成不同的子光瞳像,各子光瞳像所划分的子孔径数量与子孔径占据的微透镜阵列中微透镜的数量相同。
8.优选地,天光背景信号在各子孔径上呈现为扇形图像,目标信号聚集在扇形图像的顶点位置。
9.与现有技术相比,本实用新型能够取得以下技术效果:
10.1、本实用新型将角锥棱镜和微透镜阵列相结合,实现天光背景信号与目标信号的
有效分离,相比于白天自然导星自适应光学系统中只使用角锥棱镜,本实用新型更加适用于低信噪比情况下的弱目标探测,而且在信噪比相同的情况下能够提供更好的探测效果,从而有效实现棱锥波前传感器在白天自然导星自适应光学系统中的应用。
11.2、相对于白天自然导星自适应光学系统中使用的哈特曼波前传感器,本实用新型能够提供更高的灵敏度。
附图说明
12.图1为传统棱锥波前传感器的光路结构示意图;
13.图2为传统棱锥波前传感器在白天自然导星自适应光学系统中的光路结构示意图;
14.图3为传统棱锥波前传感器在白天条件下得到的目标和背景混合信号图像;
15.图4为传统棱锥波前传感器在白天条件下得到的目标信号图像;
16.图5为根据本实用新型实施例提供的棱锥波前传感器的光路结构示意图;
17.图6为根据本实用新型实施例提供的棱锥波前传感器在白天条件下得到的目标和背景混合信号图像;
18.图7为根据本实用新型实施例提供的棱锥波前传感器在白天条件下得到的目标信号图像。
19.其中的附图标记包括:1~第一会聚透镜、2~视场光阑、3~角锥棱镜、4~第二会聚透镜、5~微透镜阵列、6~探测相机、7~子光瞳像、8~子孔径。
具体实施方式
20.在下文中,将参考附图描述本实用新型的实施例。在下面的描述中,相同的模块使用相同的附图标记表示。在相同的附图标记的情况下,它们的名称和功能也相同。因此,将不重复其详细描述。
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,而不构成对本实用新型的限制。
22.图5示出了根据本实用新型实施例提供的棱锥波前传感器的光路结构。
23.如图5所示,本实用新型实施例提供的棱锥波前传感器,包括沿光束传播方向依次设置的第一会聚透镜1、视场光阑2、角锥棱镜3、第二会聚透镜4、微透镜阵列5和探测相机6,角锥棱镜3的顶点位于第一会聚透镜1的焦点处,探测相机6的探测平面共轭于角锥棱镜3的顶点所在的平面,使得探测相机6的探测平面与角锥棱镜3的顶点所在的平面形成4f光学系统,视场光阑2设置在角锥棱镜3顶点的前方位置。
24.第一会聚透镜1接收到包含目标信号与天光背景信号的入射总信号,经过视场光阑2减小天光背景的影响后,经过角锥棱镜3的四个面、第二会聚透镜4的折射后,再经过微透镜阵列5,最终成像在探测相机6上,呈现为四个子光瞳像7,每个子光瞳像7划分为多个子孔径8,各子光瞳像7所划分的子孔径8的数量与角锥棱镜3折射出的每个子光束占据的微透镜阵列5中的微透镜数量相同。
25.视场光阑2能够限制天光背景的视场,阻碍多余的天光背景进入棱锥波前传感器,
可以通过调整视场光阑2的尺寸保证每个子孔径8中的天光背景信号不发生重叠。
26.微透镜阵列5用于对探测相机6上的目标信号与天光背景信号进行有效分离。在每个子孔径8中,天光背景信号呈现为扇形图像,目标信号聚集在扇形图像的顶点位置,从而通过微透镜阵列5将目标光与天光背景信号在探测相机6上实现分离,从子光瞳像7上看,目标信号被聚集为点阵列图像,而天光背景信号呈现为四分之一扇形阵列图像。
27.经过角锥棱镜3后,入射混合光(即目标光与背景光)被分成四个子光束,并形成四个子光瞳像(圆形),天光背景信号与目标信号是重叠的,再经过微透镜阵列5后,目标信号变成点阵列图案,天光背景信号变成扇形阵列图案,实现目标信号与天光背景信号的有效分离。
28.由于目标光是点光源,天光背景是面光源,所以目标信号聚集为点阵列图像,天光背景信号为扇形阵列图像。
29.利用本实用新型实施例提供的棱锥波前传感器得到的目标和背景混合信号图像如图6所示,再令入射信号只有目标信号,得到的目标信号图像如图7所示。根据图6与图7的对比可以看出,经过本实用新型实施例的棱锥波前传感器,目标信号被聚集为点阵列图像,而天光背景信号呈现为四分之一扇形阵列图像,目标信号可以明显与天光背景信号区别开来。
30.本实用新型将角锥棱镜和微透镜阵列相结合,实现天光背景信号与目标信号的有效分离,相比于白天自然导星自适应光学系统中只使用角锥棱镜,本实用新型更加适用于低信噪比情况下的弱目标探测,而且在信噪比相同的情况下能够提供更好的探测效果,从而有效实现棱锥波前传感器在白天自然导星自适应光学系统中的应用。
31.相对于白天自然导星自适应光学系统中使用的哈特曼波前传感器,本实用新型能够提供更高的灵敏度。
32.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
33.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
34.以上本实用新型的具体实施方式,并不构成对本实用新型保护范围的限定。任何根据本实用新型的技术构思所作出的各种其他相应的改变与变形,均应包含在本实用新型权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。