1.本发明涉及水上机器人技术领域,更具体地,涉及一种仿生水黾机器人及其运动控制方法。
背景技术:
2.水黾是一种在湖水、池塘、水田和湿地中常见的小型水生昆虫,水黾科昆虫有3对足,前足较短,中、后足很长,向四周伸开,中间的一对腿是驱动的腿。水黾足的跗节上的毛使得它们可以借助表面张力在水面上非常快地运动,而不会下沉,研究人员发现,水黾的腿能排开300倍于其身体体积的水量,这就是这种昆虫非凡浮力的原因。水黾正是利用其腿部特殊的微纳米结构,将空气有效地吸附在这些同一取向的微米刚毛和螺旋状纳米沟槽的缝隙内,在其表面形成一层稳定的气膜,阻碍了水滴的浸润,宏观上表现出水黾腿的超疏水特性。近几年仿水黾机器人的发展得到很多方面的关注。
3.由于仿水黾机器人依赖其超疏水性浮在水面上,因此其活动范围能扩展到传统水上装置无法到达的超浅水域及水下暗礁较多的水域,具有水质监测,水面搜索,特种侦查等作用。同时由于水黾的浮水原理是表面张力主导的,要使其在水面较高效率地运动,不能使用马达和螺旋桨,否则会破坏其超疏水性,导致其失去平衡甚至沉没。中国专利公开了一种水上漂浮仿生水黾机器人,其采用涂有疏水剂的金属丝作为腿部结构,采用电池作为驱动能源的三级齿轮驱动机构;中国专利还公开了一种仿生水黾机器人,主要包括机架、对称安装在机架上的前后四条支撑腿和中间左右两条划水腿、舵机组件和控制电路,其承载能力有所提高,但在波浪中的稳定性较差。
4.但是,现有的仿水黾机器人公开的结构都只模仿了水黾外形,并没有对其运动状态及水黾的排水原理进行仿生设计,因此运动效率低下且灵敏度低,无法更接近于水黾的真实运动形态。
技术实现要素:
5.本发明的目的在于克服现有的仿水黾机器人无法更接近于水黾的真实运动形态,运动效率低的不足,提供一种仿生水黾机器人及其运动控制方法。本发明在简化机构的基础上能使机器人在运动上更加接近水黾,能减少自重和能量损耗,提高灵敏度和运动效率。
6.为解决上述技术问题,本发明采用的技术方案是:
7.一种仿生水黾机器人,包括主体框架,分别连接于主体框架前后两端的一对前支撑腿和一对后支撑腿,对称设于主体框架两侧且位于前支撑腿和后支撑腿之间的一对驱动腿,以及连接驱动腿且用于驱动驱动腿进行往复摆动的传动装置,前支撑腿和后支撑腿与水面接触的部分为经过超疏水处理的部分,驱动腿的摆动平面与水面的夹角α为14
°
~16
°
。
8.需要说明的是,本发明依靠前支撑腿和后支撑腿上经过超疏水处理的与水面接触的部分,使得前后支撑腿的表面张力来主导飘浮作用,不同于现有通过浮筒等结构来模仿水黾仿生机器人的结构设计,本发明更贴近水黾本身的飘浮原理;同时通过驱动腿的摆动
平面与水面成一定角度,使得驱动腿进行摆动时可以对水黾的运动状态进行划水仿生,采用这种方式对水面进行拨动产生推力,在运动过程中一方面能够起到一定的平衡作用,另一方面能够提供向前的驱动力,结构简单巧妙,且运动过程的灵敏度更高。
9.进一步的,每个前支撑腿包括一端与主体框架铰接的第一连接腿,铰接在第一连接腿另一端的第一疏水板,后支撑腿包括一端与主体框架铰接的第二连接腿,铰接在第二连接腿另一端的第二疏水板,第一连接腿的长度大于第二连接腿的长度,第一疏水板和第二疏水板与水面保持平行。这样,通过第一连接腿和第二连接腿长度的调整,实现驱动腿摆动平面与水面成一定角度差异,同时疏水板模仿水黾腿部特殊的微纳米结构,实现对水面的表面张力;本发明的疏水板可采用较大面积板材,以提供更大的表面张力。
10.进一步的,第一疏水板和第二疏水板均为铝板,铝板表面均匀设有微米级凹槽,铝板表面还涂覆有超疏水涂层。
11.进一步的,微米级凹槽的大小为0.5μm~5μm。
12.需要说明的是,可通过皮秒激光对铝板的表面进行减材处理,使铝片表面出现微米级凹槽,增强其表面粗糙度,激光烧蚀的工序更少,效率更高。
13.进一步的,超疏水涂层为十三氟辛基三甲氧基硅烷和乙醇的混合涂层。需要说明的是,使用十三氟辛基三甲氧基硅烷和乙醇混合均匀后涂抹在进行过表面减材处理的铝板表面,之后将铝板置于烘箱内,通过烘干使其化学改性,实现铝材表面超亲水向超疏水的性能转变。
14.进一步的,第一疏水板和第二疏水板表面的接触角为149
°
~151
°
。这样,通过将疏水板的表面经粗糙度处理和涂层化学改性,可将疏水板的表面接触角控制为149
°
~151
°
左右,经接触角测试,具有很好的超疏水性能。
15.进一步的,传动装置包括驱动电机,连接驱动电机的主动齿轮,与主动齿轮啮合的第一从动齿轮,与第一从动齿轮啮合的第二从动齿轮,以及与第二从动齿轮啮合的第三从动齿轮,以及两端分别转动连接每个驱动腿和主体框架的辅助连杆,一对驱动腿分别与第二从动齿轮和第三从动齿轮的齿轮盘面活动铰接,第二从动齿轮和第三从动齿轮的直径相同。
16.需要说明的是,本发明通过两级齿轮传动,只需一个电机即可同时控制一对驱动腿做往复摆动运动,实现在水面上的动力驱动,通过控制系统来对电机进行控制,调整电机频率,就能改变驱动腿的运动频率,结构设计简单巧妙。
17.进一步的,驱动腿远离齿轮盘面的一端设有划水板,划水板朝向水面延伸出一段距离。这样,划水板可提供更大的接触面积,使划水板与水面接触过程中能够产生更大的推动力。
18.进一步的,主体框架的顶部还设有搭载平台。需要说明的是,主体框架的整体尺寸及预留安装空间可以根据实际需求变化,设有搭载平台可以根据需求搭载检测设备或铺设太阳能板,增加本发明的实用功能。
19.本发明还提供了一种仿生水黾机器人的运动控制方法,具体如下:
20.驱动腿的初始位置为:驱动腿的轴线与水面的夹角θ为14
°
~16
°
,驱动腿的轴线与前支撑腿和后支撑腿的对称线的夹角β为29
°
~31
°
,且驱动腿的初始位置朝向前支撑腿方向;
21.驱动腿从初始位置开始摆动,在竖直方向驱动腿做朝向水面的上下运动,在水平方向驱动腿做由前支撑腿朝向后支撑腿的前后摆动运动,当驱动腿前后摆动达到0
°
且竖直方向运动至0
°
时,划水板接触水面,驱动腿进入划水阶段,产生推力推动仿生水黾机器人前进;当驱动腿前后摆动达到-29
°
~-31
°
且竖直方向运动至-14
°
~-16
°
时,驱动腿结束划水阶段并开始往回摆动,直至驱动腿恢复到初始位置,完成一个运动过程。
22.驱动腿在竖直方向上的摆动角度可满足以下关系式:
[0023][0024]
h—驱动腿末端高度的中点
[0025]
a—驱动腿末端的最低点
[0026]
l—驱动腿长度
[0027]
r3—第二从动齿轮和第三从动齿轮的半径。
[0028]
与现有技术相比,本发明的有益效果是:
[0029]
本发明依靠前支撑腿和后支撑腿与水面接触的部分经过超疏水处理,使得前后支撑腿的表面张力主导飘浮作用,不同于现有通过浮筒等结构来模仿水黾仿生机器人的结构设计,本发明更贴近水黾本身的飘浮原理;同时通过驱动腿的摆动平面与水面成一定角度,使得驱动腿进行摆动时可以对水黾的运动状态进行划水仿生,采用这种方式对水面进行拨动产生推力,在运动过程中一方面能够起到一定的平衡作用,另一方面能够提供向前的驱动力,结构简单巧妙,且运动过程的灵敏度更高。
附图说明
[0030]
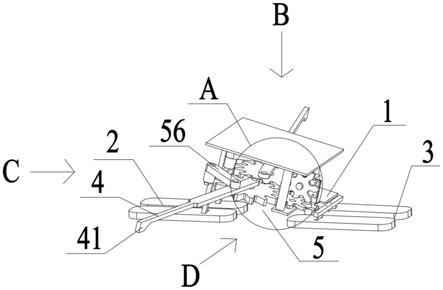
图1为本发明的整体结构示意图;
[0031]
图2为图1从d向看的结构示意图;
[0032]
图3为图1中a处的局部放大图;
[0033]
图4为图1从b向看的结构示意图;
[0034]
图5为图1从c向看的结构示意图;
[0035]
图6为本发明中驱动腿在竖直方向上的运动轨迹示意图;
[0036]
图7为本发明中驱动腿在水平方向上的运动轨迹示意图。
[0037]
图示标记说明如下:
[0038]
1-主体框架,11-搭载平台,2-前支撑腿,21-第一连接腿,22-第一疏水板,3-后支撑腿,31-第二连接腿,32-第二疏水板,4-驱动腿,41-划水板,5-传动装置,51-驱动电机,52-主动齿轮,53-第一从动齿轮,54-第二从动齿轮,55-第三从动齿轮,56-辅助连杆。
具体实施方式
[0039]
下面结合具体实施方式对本发明作进一步的说明。其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0040]
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描
述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0041]
实施例1
[0042]
如图1至图4所示,一种仿生水黾机器人,包括主体框架1,分别活动连接于主体框架1前后两端的一对前支撑腿2和一对后支撑腿3,对称设于主体框架1两侧且位于前支撑腿2和后支撑腿3之间的一对驱动腿4,以及连接驱动腿4且用于驱动驱动腿4进行往复摆动的传动装置5,前支撑腿2和后支撑腿3与水面接触的部分为经过超疏水处理的部分,驱动腿4的摆动平面与水面的夹角α为15
°
。
[0043]
本实施例依靠前支撑腿2和后支撑腿3与水面接触的部分经过超疏水处理,使得前后支撑腿的表面张力来主导飘浮作用,不同于现有通过浮筒等结构来模仿水黾仿生机器人的结构设计,本实施例结构更贴近水黾本身的飘浮原理;同时通过驱动腿4的摆动平面与水面成一定角度,使得驱动腿4进行摆动时可以对水黾的运动状态进行划水仿生,采用这种方式对水面进行拨动产生推力,在运动过程中一方面能够起到一定的平衡作用,另一方面能够提供向前的驱动力,结构简单巧妙,且运动过程的灵敏度更高。
[0044]
如图2所示,每个前支撑腿2包括一端与主体框架1铰接的第一连接腿21,铰接在第一连接腿21另一端的第一疏水板22,后支撑腿3包括一端与主体框架1铰接的第二连接腿31,铰接在第二连接腿31另一端的第二疏水板32,第一连接腿21的长度大于第二连接腿31的长度,第一疏水板22和第二疏水板32与水面保持平行。这样,通过第一连接腿21和第二连接腿31长度的调整,实现驱动腿4摆动平面与水面成一定角度差异,同时第一疏水板22和第二疏水板32模仿水黾腿部特殊的微纳米结构,实现对水面的表面张力;其中,本实施例的疏水板均采用大面积板材,可以提供更大的表面张力。
[0045]
本实施例中,第一疏水板22和第二疏水板32均为铝板,铝板表面均匀设有微米级凹槽,铝板表面还涂覆有超疏水涂层。
[0046]
本实施例中,微米级凹槽的大小为0.5μm。
[0047]
本实施例通过皮秒激光对铝板的表面进行减材处理,本实施例采用的激光脉冲宽度为0.8皮秒~10皮秒,频率为10khz~2mhz,单脉冲能量50μj~100μj,使铝片表面出现微米级凹槽,增强其表面粗糙度,激光烧蚀的工序更少,效率更高。
[0048]
本实施例中,超疏水涂层为十三氟辛基三甲氧基硅烷和乙醇的混合涂层。本实施例将质量比为1:10~20的十三氟辛基三甲氧基硅烷和乙醇混合均匀,混合均匀后涂抹在材料表面,之后将铝板置于烘箱内,保持温度为90~110℃,固化100~120分钟,通过烘干使其化学改性,实现铝材表面超亲水向超疏水的性能转变。
[0049]
本实施例中,第一疏水板22和第二疏水板32表面的接触角为150
°
。这样,通过将第一疏水板22和第二疏水板32的表面经粗糙度处理和涂层化学改性,可将第一疏水板22和第二疏水板32的表面接触角控制为150
°
,经接触角测试,具有很好的超疏水性能。
[0050]
如图3所示,传动装置5包括驱动电机51,连接驱动电机51的主动齿轮52,与主动齿轮52啮合的第一从动齿轮53,与第一从动齿轮53啮合的第二从动齿轮54,以及与第二从动
齿轮54啮合的第三从动齿轮55,以及两端分别转动连接每个驱动腿4和主体框架1的辅助连杆56,一对驱动腿4分别与第二从动齿轮54和第三从动齿轮55的齿轮盘面活动铰接,第二从动齿轮54和第三从动齿轮55的直径相同。
[0051]
本实施例通过两级齿轮传动,只需一个驱动电机51即可同时控制一对驱动腿4做往复摆动运动,实现在水面上的动力驱动,通过另设控制系统来对驱动电机51进行控制,调整驱动电机51的频率,就能改变驱动腿4的运动频率,结构设计简单巧妙。
[0052]
如图1所示,驱动腿4远离齿轮盘面的一端设有划水板41,划水板41朝向水面延伸出一段距离。这样,划水板41可提供更大的接触面积,使划水板41与水面接触过程中能够产生更大的推动力。
[0053]
如图1和图4所示,主体框架1的顶部还设有搭载平台11。需要说明的是,主体框架1的整体尺寸及预留安装空间可以根据实际需求变化,设有搭载平台11可以根据需求搭载检测设备或铺设太阳能板,增加本实施例的实用功能。
[0054]
实施例2
[0055]
本实施例与实施例1类似,所不同之处在于,本实施例中:
[0056]
驱动腿4的摆动平面与水面的夹角α为14
°
;第一疏水板22和第二疏水板32表面的接触角为149
°
;微米级凹槽的大小为3μm。
[0057]
本实施例的其他结构与原理均与实施例1相同。
[0058]
实施例3
[0059]
本实施例与实施例1类似,所不同之处在于,本实施例中:
[0060]
驱动腿4的摆动平面与水面的夹角α为16
°
;第一疏水板22和第二疏水板32表面的接触角为151
°
;微米级凹槽的大小为5μm。
[0061]
本实施例的其他结构与原理均与实施例1相同。
[0062]
实施例4
[0063]
如图1至图7所示,一种仿生水黾机器人的运动控制方法,具体如下:
[0064]
如图6和图7所示,驱动腿4的初始位置为:驱动腿4的轴线与水面的夹角θ为15
°
,驱动腿4的轴线与前支撑腿2和后支撑腿3的对称线的夹角β为30
°
,且驱动腿4的初始位置朝向前支撑腿2方向;
[0065]
如图4至图7所示,驱动腿4从初始位置开始摆动,在竖直方向驱动腿4做朝向水面的上下运动,在水平方向驱动腿4做由前支撑腿2朝向后支撑腿3的前后摆动运动,当驱动腿4前后摆动达到0
°
且竖直方向运动至0
°
时,划水板41接触水面,驱动腿4进入划水阶段,产生推力推动仿生水黾机器人前进;当驱动腿4前后摆动达到-30
°
且竖直方向运动至-15
°
时,驱动腿4结束划水阶段并开始往回摆动,直至驱动腿4恢复到初始位置,完成一个运动过程;
[0066]
驱动腿4在竖直方向上的摆动角度可满足以下关系式:
[0067][0068]
h—驱动腿末端高度的中点
[0069]
a—驱动腿末端的最低点
[0070]
l—驱动腿长度
[0071]
r3—第二从动齿轮和第三从动齿轮的半径。
[0072]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
