技术特征:
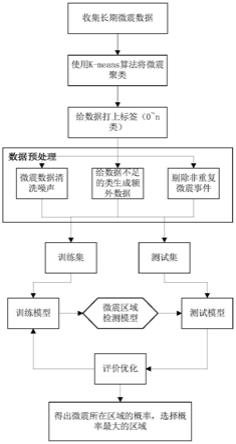
1.一种基于深度学习融合驱动的微震稀疏台网定位方法,其特征在于,包括以下步骤:步骤1:将台站安装在井下开采巷道中,并收集长期微震的波形数据,将目标检测区域发生过的微震的波形数据进行记录;步骤2:使用k-means算法将微震聚类,获得u个聚类中心,根据u个聚类中心定义聚类区域,聚类中心则为聚类区域的质心,划分u个多边形,划分多边形区域的方法学名叫voronoi多边形,即划分的多边形内的每个点到该多边形质心的距离都小于到其他多边形质心的距离,地图上的所有微震发生位置都以点表示,分配给最接近的聚类区域,由此将微震的波形数据分类为包含n个类:0类对应于没有任何微震的井下噪声,1类到n类对应于来自相应地理区域的微震簇;步骤3:利用生成对抗网络的方法生成额外新波形窗口的方法,将步骤2中在1类到n类中的数据明显少于其他类数据的微小数据集生成额外数据窗口以扩大数据集;步骤4:将步骤2的数据和步骤3生成的数据分为两个独立测试集和训练集,其中测试集和训练集的比例为2:8;步骤5:采用微震波形数据作为输入,将频率为100hz的微震波形数据切割成10s一个的窗口,则10s的数据窗口可生成1000个波形采样样本,将每1hz波形数据窗口的波形图进行输入,设计微震区域检测模型,所述微震区域检测模型包括:波形数据输入、数据规则化、卷积运算、激活、池化、全连接与softmax分类操作,微震区域检测模型在训练后还进行初始化权重以及偏置,通过反向传播算法得到优化模型,运行后微震区域检测模型输出一个n维向量,该n维向量的第n位为对应该微震属于位置u的概率,微震区域检测模型计算概率分布数据的方法为:式中:w是所有权重的集合;b是所有偏差的集合;z
c
为每一类的计算分数;p
c
为每类最后的计算概率;c为类的标签;z0为波形数据;z
k
为求和函数中每一类的计算分数;n为类;k为求和函数的内部参数;步骤6:在单台站情况下,能够对同一水平面微震事件进行区域定位,双台站和三台站情况下能够进行精准空间定位,首先由台站d来计算微震a和微震b之间的间隔距离|r
ab
|,利用台站d采集井下开采巷道附近产生的微震信号,获取p波和s波到达台站d的微震速度v
p
和v
s
,将v
p
和v
s
进行计算得到速度系数k
v
;k
v
=v
pvs
/(v
p-v
s
)
ꢀꢀꢀꢀꢀ
(1)步骤7:获取p波和s波到达台站d的时间,根据p波和s波传播到台站d的时间不同来确定微震位置的方法,当p波和s波传播到台站d时,就会触发台站d内的检波器记录下接收到p波
和s波到达检波器的时刻,根据到时不同理论,可得出微震分别到达台站d的距离|r
ed
|:步骤8:如果|r
ab
|远小于这些微震和台站d之间的距离,那么微震间隔距离用以下等式近似,其中是微震a、b之间距离的近似值,|r
ad
|和|r
bd
|分别是微震a和微震b到单台站d的距离:距离:式中:是s波到达微震a的时间;是p波到达微震a的时间;是s波到达微震b的时间;是p波到达微震b的时间;步骤9:若拥有两个台站d1和d2且同样满足远离两个震源这一特点的话,分别对两个台站d1和d2的数据进行计算,然后使用勾股定理以获得更好的近似;步骤10:若拥有三个台站d1、d2和d3,则按三个台站d1、d2和d3距离震源位置比较,选取位置更远的两个台站执行步骤9;步骤11:获取步骤5中得出的区域中l个已知的非共面微震的震源位置,通过台站计算这些已知震源的位置和待测震源之间的间距并建立距离方程组来得出目标位置,首先根据区域内已有微震簇位置构建微震坐标系,在一个由l 1次微震组成的微震簇,其中x1,x2,
…
x
l 1
为每次微震发生时的震源中心坐标,在三维坐标系r3中定义,获取每对微震i和j之间的欧氏距离,|r
ij
|是微震i和j之间的距离,|x
i
|和|x
j
|分别是微震i和j与参考系的原点的距离(i,j=1,2,
…
,l 1),可得:步骤12:重构坐标系,利用微震簇的内部结构不随平移和旋转而改变的特性,因此将第l 1次微震发生位置设计为原点,即x
l 1
=(0,0,0),此时|r
il 1
|=|x
i
|,|r
jl 1
|=|x
j
|,将步骤11转化为:步骤13:定义一个l
×
3的矩阵x用来放置步骤11中设计的原始坐标系的微震震源坐标,再定义一个l
×
3的矩阵x
a
用来放置步骤12中新坐标系的微震震源坐标,其中x
l 1
=(0,0,0),矩阵x
a
、x的每一行为震源的xyz三维坐标,首先使用平移向量将矩阵x
a
转换为x,将矩阵x
a
中每个坐标都进行偏移转换,其中分别是原始参考系和新参考系中微震簇的几何中心的位置:
x=x
i i=1,2,
…
,l (8)步骤14:定义一个l
×
l大小的距离矩阵r,存放步骤11中每对微震之间的距离,第i行第j列即为微震i和j之间距离,下面为每一位的计算公式:步骤15:矩阵r可由公式(7)和公式(9)得r=xx
t r
l
×
l (10)则现在可得r的奇异值分解,其中v是一个正交矩阵,s(l
×
l)是r的奇异值对角矩阵步骤16:通过此公式得出x中的参数,其中g=v(1:l,1:3),∑=s(1:3,1:3),h:m表示沿着一个轴从第h个位置到第m个位置提取矩阵的元素,此时目标微震的位置坐标x
l 1
已经在矩阵x中得出,为矩阵x的l 1行的三个参数,分别对应其xyz三个方向的坐标x=g∑
1/2 (12)。
技术总结
基于深度学习融合驱动的微震稀疏台网定位方法,构建定位波形数据集,在此阶段利用收集到的井下台站记录的长期微震波形数据,将井下划分成多个可能的微震区域,构建微震定位数据集,基于已构建的微震定位数据集,研究台网稀疏情况下基于深度学习的区域定位模型,该模型通过对波形数据的处理,将输出待预测微震发生位置概率最大的区域,利用已经监测出的区域内所有曾发生过的微震位置和其震波数据,通过震波的速度和p波s波到差时计算获得与台站的距离,并由此来计算每一对微震之间的位置,最后经由构建微震坐标系和矩阵计算的方法获得目标微震的位置。本发明能够在井下台站数量少于四个的情况下进行矿山微震震源准确定位。于四个的情况下进行矿山微震震源准确定位。于四个的情况下进行矿山微震震源准确定位。
技术研发人员:曹安业 杨旭 张远哲 刘耀琪 白贤栖 牛强
受保护的技术使用者:中国矿业大学
技术研发日:2022.01.25
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。