1.本发明涉及风洞试验支撑结构领域,尤其涉及一种用于全模颤振风洞试验的四索支撑系统。
背景技术:
2.全模颤振风洞试验是飞行器整机颤振设计与验证的主要手段。在部件之间耦合程度较低的情况下,利用部件或半模颤振试验来校验飞行器的颤振特性一般是能够满足工程需求的。随着飞行器构型的发展和结构优化要求的提高,部件之间的相互影响越来越复杂,需要通过全模颤振试验研究飞行器的整机颤振特性
3.开展全模颤振试验,需要为模型设计专门的支撑系统,一方面需要有较低的支撑频率,模拟飞行器自由飞行状态,减少支撑对全机颤振特性的影响,另一方面,在来流动压变化情况下,实时调整模型姿态确保模型受到的气动静载荷最小,并保证在吹风试验中模型的姿态稳定。
4.现有技术中美国双索悬挂系统在风洞试验段内只布置钢绳和模型,对模型的气动干扰小,有利于准确获取模型的颤振特性,但是由于该系统模型前后均布置一根索,在开展全模颤振风洞试验时绳索系统无法对模型滚转姿态进行控制,且索张力直接作用在模型上。俄罗斯悬浮支撑系统通过主索悬挂模型、使得模型不受索张力载荷作用,通过布置在模型上方的钢绳实现滚转姿态控制,而该系统需要在风洞试验段内部布置控制装置、立柱、弹簧预紧装置等,对模型的气动干扰相对较大,对模型的适应性受到立柱、控制装置限制。
技术实现要素:
5.本发明的目的在于提供一种用于全模颤振风洞试验的四索支撑系统,从而解决现有技术中存在的前述问题。
6.为了实现上述目的,本发明采用的技术方案如下:
7.一种用于全模颤振风洞试验的四索支撑系统,包括张力调节滑轮组、连接结构、前索、主索、动滑轮组、伺服电机、丝杠滑台机构和后索;
8.所述张力调节滑轮组,包括对称安装的一对以上的定滑轮、动滑轮和预紧螺母,所述预紧螺母与两个对称的定滑轮不在同一直线上,且安装于对称的所述定滑轮的中间位置,所述动滑轮安装于所述预紧螺母上;所述前索呈闭环安装于所述张力调节滑轮组上;
9.所述丝杠滑台机构包括两根支撑杆、两根滚珠丝杠和两个滑块,所述支撑杆分别安装于所述飞行器模型后方两侧位置,每一根所述支撑杆上均安装有一个所述滚珠丝杠,每一个所述滚珠丝杠上均安装有一个所述滑块;所述伺服电机包括两个,分别与所述滚珠丝杠相连;所述后索穿过所述动滑轮组,两端分别连接于两个所述滑块上;
10.所述主索包括两根,分别安装于飞行器模型两侧,所述前索与所述主索通过所述连接结构相连接,所述主索与所述后索通过所述动滑轮组相连。
11.优选的,所述前索连接于所述连接结构的中间位置,所述主索的一端分别连接于
所述连接结构的两侧位置,另一端连接于所述动滑轮组的两侧。
12.优选的,所述飞行器模型头部位置安装有前摇杆,尾部对称位置安装有两个支撑环,两根所述主索分别固接与所述前摇杆的两侧,并分别滑动穿过所述支撑环。
13.优选的,所述滑块可围绕所述支撑杆旋转。
14.优选的,还包括弹簧和测力计,所述后索的一端与相应的滑块之间通过所述弹簧相连,另一端与相应的滑块之间通过测力计相连。
15.优选的,所述动滑轮组悬于所述主索与所述后索之间。
16.优选的,所述连接结构悬于所述前索与所述主索之间。
17.优选的,所述连接结构选用三角架,所述前索和两根所述主索分别与所述三角架的一个角相连。
18.本发明的有益效果是:本发明公开了一种用于全模颤振风洞试验的四索支撑系统,通过飞行器模型的前摇杆与主索固连使模型能绕其转动,后连接滑动支撑环与主索之间存在间隙,可以是飞行器模型在进行颤振风洞试验时不受索张力作用;通过丝杆滑台机构调节飞行器模型的俯仰与滚转姿态,降低了模型设计难度、提高了模型姿态调节能力,且气动干扰小,保证了全模颤振风洞试验的有效性。本发明对模型的气动干扰小,且模型不受索张力载荷作用,既可以实现俯仰姿态调整,也可以实现滚转姿态调整,有利于准确获取模型的颤振特性。
附图说明
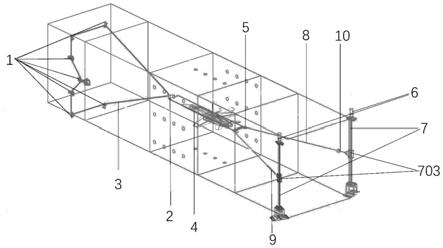
19.图1是四索支撑系统结构图;
20.图2是四索支撑系统的张力调节装置结构图;
21.图3是四索支撑系统的模型连接结构图;
22.图4是四索支撑系统的动滑轮组连接结构图;
23.图5是四索支撑系统的丝杆滑台机构结构图;
24.图6是有无反馈控制两种情况下俯仰角和位置角仿真响应时间历程对比图。
25.图中,1—张力调节滑轮组,2—连接结构,3—前索,4—主索,5—动滑轮组,6—伺服电机,7—丝杠滑台机构,8—后索,9—弹簧,10—测力计,11—前摇杆,12—支撑环,101—定滑轮,102—动滑轮,103—预紧螺母,701—支撑杆,702—滚珠丝杠,703—滑块。
具体实施方式
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
27.一种用于全模颤振风洞试验的四索支撑系统,如图1所示,包括张力调节滑轮组1、连接结构2、前索3、主索4、动滑轮组5、伺服电机6、丝杠滑台机构7、后索8和弹簧9;
28.所述张力调节装置包括所述张力调节滑轮组1和所述前索3,如图2所示,所述张力调节滑轮组1,包括对称安装的一对以上的定滑轮101、动滑轮102和预紧螺母103,所述定滑轮101相对所述动滑轮102的移动路线呈对称位置安装于所述风洞侧壁,所述预紧螺母103与两个对称的定滑轮101不在同一直线上,且安装于对称的所述定滑轮101的中间位置,所
述动滑轮102安装于所述预紧螺母103上,通过所述预紧螺母103的转动调节所述动滑轮102的移动;所述连接结构2安装于飞行器模型的前端,所述前索3连接于所述连接结构2的中间位置,并呈闭环安装于所述张力调节滑轮组1上;
29.飞行器模型的连接结构2如图3所示,所述飞行器模型的头部位置安装有前摇杆11,尾部对称位置安装有两个支撑环12,所述主索4包括两根,两根所述主索4位于所述飞行器模型的两侧,且一端分别连接于所述连接结构2的两侧位置,并分别依次固接于所述前摇杆11侧以及滑动穿过所述支撑环12,所述支撑环12与所述主索4之间存在间隙,另一端连接于所述动滑轮组5的两侧;两根所述主索4与所述前索3通过所述连接结构2相连接,所述连接结构2悬于所述主索4与所述前索3之间;
30.所述丝杠滑台机构如图5所示,包括两根支撑杆701、两根滚珠丝杠702和两个滑块703,所述支撑杆701分别安装于所述飞行器模型后方两侧位置,每一根所述支撑杆701上均安装有一个所述滚珠丝杠702,每一个所述滚珠丝杠702上均安装有一个所述滑块703,且所述滑块703可围绕所述支撑杆701进行旋转;所述伺服电机6包括两个,分别安装于两根所述支撑杆701上方,并分别与所述滚珠丝杠702相连,通过所述伺服电机6分别驱动所述滚珠丝杠702带动所述滑块703进行上下滑动;所述后索8穿过所述动滑轮组5,两端分别连接于两个所述滑块703上,且所述后索8的一端与相应的滑块703之间通过所述弹簧9相连,另一端与相应的滑块703之间通过测力计10相连。
31.所述动滑轮组5的连接结构2如图4所示,所述动滑轮组5悬于所述主索4与所述后索8之间,两根所述主索4和所述后索8通过所述动滑轮组5相连。
32.所述连接结构2选用三角架,所述前索3和两根所述主索4分别与所述三角架的一个角相连。
33.上述用于全模颤振风洞试验的四索支撑系统的工作原理为:利用所述前索3、所述主索4和所述后索8将飞行器模型悬挂于风洞内部,所述张力调节装置中,通过旋转所述与预紧螺母103使所述动滑轮在对称的所述定滑轮之间进行直线运动,从而通过调整所述动滑轮102与所述定滑轮101之间相对位置,调节所述前索3中的预紧力大小;所述丝杠滑台结构中,通过所述伺服电机6控制两个所述滑块703沿所述支撑杆701同向或反向滑动,通过所述滑块703自动绕所述支撑杆701旋转相应角度,从而补偿后索8垂向运动时的角度变化,当两个所述滑块703同速同向滑动时,通过所述后索8带动飞行器模型的尾部上下运动,从而模拟飞行是俯仰的姿态调节;当两个所述滑块703不是同速滑动2时,呈高度差的滑块703带动所述后索8发生角度变化,从而带动所述动滑轮组5和所述前摇杆11进行转动,最终带动飞行器模型进行滚转运动,来模拟飞行的滚转的姿态调节。并且所述飞行器模型进行姿态转变时,所述主索4在所述支撑环12之间进行滑动,并不会拉动所述支撑环12进行转变,可以保证绳索所受的牵引力不变;此时通过对所述后索8与所述滑块703之间的弹簧9的刚度进行选择,使所述测力计10的至不会发生变化,从而使弹簧9与所述后索8之间的张力为较低的支撑频率,从而保证飞行器模型能够自由的模拟飞行状态。
34.实施例
35.本实施例中利用清华大学insides多体动力学求解器求解四索支撑系统下的飞行器模型吹风状态下的响应,对风洞吹风下的模型姿态调整过程进行计算,验证反馈、前馈控制的有效性;在四索悬挂系统基础上,通过多体动力学求解器对无反馈控制情况下的风洞
中飞行器模型进行姿态控制仿真分析,获得的模型俯仰角和前索连接点位置角的时间历程如图6所示,结果表明,系统满足开环稳定,可以保证试验安全有效。
36.通过采用本发明公开的上述技术方案,得到了如下有益的效果:
37.本发明公开了一种用于全模颤振风洞试验的四索支撑系统,通过飞行器模型的前摇杆与主索固连使模型能绕其转动,后连接滑动支撑环与主索之间存在间隙,可以是飞行器模型在进行颤振风洞试验时不受索张力作用;通过丝杆滑台机构调节飞行器模型的俯仰与滚转姿态,降低了模型设计难度、提高了模型姿态调节能力,且气动干扰小,保证了全模颤振风洞试验的有效性。本发明对模型的气动干扰小,且模型不受索张力载荷作用,既可以实现俯仰姿态调整,也可以实现滚转姿态调整,有利于准确获取模型的颤振特性。
38.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
