基于mems的相位空间光调制架构
技术领域
1.本公开总体上涉及光调制,并且更具体地涉及相位空间光调制的示例。
背景技术:
2.全息投影使用从相位空间光调制器反射的相干光源的各部分之间的干涉将图像投影到指定距离或“远场”或夫琅和费区(fraunhofer region)。相位空间光调制是一种光调制形式,其中每个像元的反射相位确定反射光相对于从相位空间光调制器(pslm)的其他像元反射的其他光的相位。因此,如果pslm将一个像元偏移四分之一波长,则从第一个像元反射的光与从第二个未偏移像元反射的光异相四分之一波长。来自第一像元和第二像元的光然后以引导组合光的可控方式干涉。
3.pslm可能具有数千或数百万个可控像元。pslm可以基于由不同相位的像元引导的反射相干光的干涉来投影图像。相比之下,传统的振幅空间光调制器(slm)反射或不反射选定的像元以创建投影的图像。此pslm投影的图像具有若干用途。它可以扫描场景以用于按方向改变图像的光检测和测距(lidar)系统,以帮助检测场景中的物体。在其他用途中,用户直接查看图像,例如使用投影到汽车的挡风玻璃上的平视显示器。
4.在lidar方面,pslm可以扫描视场上的全息投影。仅振幅slm可以使用成像配置通过一次打开单个微镜来实现这一点,但效率非常低(1/(像元数))。另一种扫描光束的方法是使用仅振幅slm来创建全息图,每个全息图对应于不同的光束位置。然而,由于衰减和生成未使用的衍射级,这可能只有大约12%的效率。然而,使用pslm来创建虚拟相位斜坡,效率可以高得多——在某些情况下接近100%。不像slm那样衰减不需要的光,pslm可以操纵光波阵面以将光引导到需要它的地方。通过操纵光波阵面,pslm器件可以在远处平面(无需投影透镜)或某个中间平面处创建图像。在远平面上的图像的情况下,pslm器件利用了夫琅和费远场平面上的傅里叶变换关系。pslm器件还可以通过引入相位曲率来生成数字全息图,从而使光在各种中间距离处聚焦。
技术实现要素:
5.根据一个示例,装置包括衬底上的驱动电极。该装置具有悬置在驱动电极上方并与平台电极导电地耦合的平台,其中平台被配置为响应于施加在驱动电极和平台电极之间的电压差而在垂直于衬底的表面的方向上移动。该装置在平台上还具有镜柱。该装置具有通过镜柱耦合到平台的反射镜,其中反射镜是矩形的。
附图说明
6.图1是表示投影全息图像的过程的示意图。
7.图2是示出使用相位空间光调制器的全息投影的输出的示意图。
8.图3是示例全息图像的示意图。
9.图4是示例pslm的三个示例像元的示意图。
10.图5是示例像元的侧视图。
11.图6是示例像元上的透视图。
12.图7是示例投影系统的示意图。
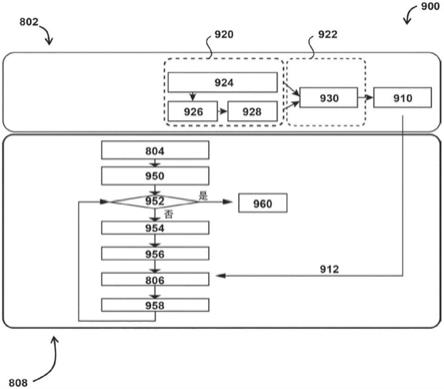
13.图8是用于制造示例pslm中的示例像元的过程流程图。
14.图9a-图9h(统称为“图9”)是图示图8的过程流程的步骤的示意图。
具体实施方式
15.在附图中,除非另有指示,否则对应的数字和符号一般指代对应的部分。附图不一定按比例绘制。
16.在本说明书中,术语“耦合”可以包括利用中间元件所做的连接,并且附加元件和各种连接可以存在于“被耦合”的任何元件之间。
17.在本说明书中,使用了术语“相位空间光调制器”(pslm)。相位空间光调制器(pslm)描述了一种由单元阵列组成的器件,每个单元根据施加到每个单元的电信号赋予不同的光学相位延迟。pslm器件可由液晶器件(lcd)、硅基液晶器件(lcos)或微机电系统(mems)器件组成。mems pslm可以由小反射镜阵列组成,这些小反射镜被致动以在垂直于阵列平面的方向上位移。pslm的功能是改变入射到器件上的光波阵面/波前的形状。pslm可以在具有操纵在不同方向的光束的效果的波阵面上施加线性相位延迟。pslm还可以赋予弯曲波阵面,该波阵面可以像透镜一样聚焦波阵面。pslm的主要优点是可以被快速重新配置以将光束操纵或聚焦到预期方向或聚焦到预期平面。
18.在lidar系统中的pslm的光学功能与数字微镜器件(dmd)的光学功能不同。在lidar系统中的接收器中使用dmd时,来自外部场景的光被成像到dmd阵列上,并且根据像元是成像激光还是背景光来打开或关闭各种像元。在pslm的情况下,光会在没有成像光学器件的帮助下落在器件上。可以通过在pslm上施加空间波阵面图案来选择场景内的特定区域或关注点,使得将关注区域引导朝向检测器。结果,不在关注区域中的光被引导到远离检测器的区域。以这种方式,pslm可以执行与成像dmd类似的功能,即将激光导向检测器,同时引导背景光远离检测器。
19.pslm可以是用于在lidar系统中操纵lidar激光束的相同或相似器件。线性相位功能可以显示在pslm上,使得它将激光引导到所期望的方向。改变每个光束方向的相锋,导致光束以获得场景的范围或反射率图像所需的特定模式进行扫描。以类似的方式,可以在pslm上显示不同的线性相位功能,以朝向检测器以不同的方向引导接收到的光。此外,通过在pslm上显示曲线相位功能,光束可以聚焦在检测器上。
20.在示例布置中,使用相位空间光调制器的全息投影图像的形状因子失配问题通过提供相位空间光调制器来解决,相位空间光调制器具有形状因子与所期望的形状因子相匹配的像元。在一个示例中,装置包括在衬底上的驱动电极。该装置具有悬置在驱动电极上方并与平台电极导电地耦合的平台,其中平台被配置为响应于施加在驱动电极和平台电极之间的电压差而在垂直于衬底的表面的方向上移动。该装置在平台上还具有镜柱。在一个示例中,该装置具有通过镜柱耦合到平台的反射镜,其中反射镜是矩形的。
21.图1是示出投影全息图像108的过程100的示意图。用于生成pslm图像的算法运用pslm相位图像和远场图像之间的傅里叶变换关系。在一个简单的示例中,使用快速傅里叶
逆变换(ifft)来处理输入图像102以产生频域图像104。使用映射频域图像104的若干过程之一来处理频域图像104以产生用于输入到空间光调制器的相位图案106。映射是使用若干算法之一完成的。gerchberg和saxton的“a practical algorithm for the determination of the phase from image and diffraction plane pictures”,optik 35,237-246(1972),描述了示例算法,其在此通过引用整体并入本文。该映射产生相位图案106,相位图案106包括相位空间光调制器的每个像元的相位分配。相干光源(例如激光器(未示出))从具有图案106的相位空间光调制器反射,以在远场或指定深度产生图像108。
22.图2是示出使用相位空间光调制器208的全息投影的输出的示意图。在此示例中,投影在远场中创建图像。相干光从具有pxp个像元的pslm 208反射。光反射到远场206,在远场206处产生图像202。因为图像是干涉图案而不是像元的集合,所以图像202在每个边上的尺寸为sin-1
(λ/p),其中λ是用于制作干涉图案的光的波长,p是pslm 208的像元的x和y维度。此外,干涉可能产生伪影或阴影图像204a、204b、204c和204d。由干涉产生的图像的形状因子与pslm 208的像元的形状因子成比例,而不是与pslm 208上的像元排列的形状因子成比例。
23.图3是示例全息图像302的示意图。pslm 308包括具有py的y维度和p
x
的x维度的像元。在该示例中,从pslm 308反射的相干光在远场306中产生图像302。所得图像302具有sin-1
(λ/p
x
)的x维度和sin-1
(λ/py)的y维度。因此,pslm 208的像元的x维度决定了图像的x维度,而pslm 208的像元的y维度决定了图像302的y维度。此外,干涉可能产生伪影或阴影图像304a、304b、304c和304d。
24.图4是示例pslm的三个示例像元402、422和442的示意图。图4以轮廓示出像元镜410、430、450以示出反射镜下面的结构。像元402包括支撑平台404并将平台404导电连接到两个平台电极412的两个平台柱414。平台404经由柱408支撑反射镜410。驱动电极406垂直移动平台404(进入页面),如下所述。反射镜410(因此像元402)具有2:1的矩形形状因子。因此,如果反射镜410的宽度为w,则反射镜410的高度(平台柱414之间的距离)为2w。在一个示例中,w为0.5μ。
25.像元422包括支撑平台424并将平台424导电连接到两个平台电极432的两个平台柱434。平台424经由柱428支撑反射镜430。驱动电极426垂直移动平台424(进入页面),如下所述。反射镜430(因此像元422)具有3:1的矩形形状因子。因此,如果反射镜430的宽度为w,则反射镜430的高度(平台柱434之间的距离)为3w。
26.像元442包括支撑平台444并将平台444导电连接到两个平台电极452的两个平台柱454。平台444经由柱448支撑反射镜450。如图4所指示,较大的平台444允许三个柱448以用于更大的稳定性。无论是矩形(包括正方形)还是其他形状因子,多个柱448为反射镜450提供了额外的稳定性并帮助维持反射镜450的垂直运动。驱动电极446垂直地移动平台444(进入页面),如下所述。反射镜450(因此像元442)具有4:1的矩形形状因子。因此,如果反射镜450的宽度为w,则反射镜450的高度(在平台柱454之间的距离)为4w。
27.图5是示例像元502的侧视图。平台504经由平台柱514连接到两个平台电极512。柱508支撑平台504上方的反射镜510。如图5所示,当向驱动电极506施加电压并且向平台电极512施加基准电压(例如接地)时,静电力向下拉平台504,从而向下拉动反射镜510。移动量由施加的电压决定。在其他示例中,像元502使用两个或更多个驱动电极506,驱动电极506
可由驱动电路(未示出)单独寻址。施加的静电力与驱动电极506和平台504的面积成比例。因此,使用多个电极,可以通过选择驱动电极506或驱动电极506的组合来精确控制力的量,从而精确控制反射镜510的垂直位置,同时将相同的电压施加到驱动电极506中的每个选定的驱动电极。由像元502提供的相移由反射镜510的垂直定位决定。例如,如果像元降低了四分之一波长(1/4λ),则从该像元反射的光相对于没有降低的像元将行进额外的二分之一波长(1/4λ向下到达反射镜,1/4λ回来)。在另一个示例中,如果像元降低八分之一波长(1/8λ),则从该像元反射的光相对到没有降低的像元将行进额外四分之一波长(1/8λ向下到达反射镜,1/8λ回来)。使用相干光,这些相位差可被采用以创建全息投影。
28.图6是在示例像元602上的透视图。在该示例中,像元602的长度是宽度的八倍,这提供了8:1的形状因子。两个柔性铰链616和两个平台柱614支撑平台604。平台柱614导电地耦合到两个平台电极612。镜柱608支撑平台604上方的反射镜610。驱动电极606在平台604下方。衬底618中的电路(未示出)将信号施加到平台电极612和驱动电极606以定位反射镜610,从而不增加或者将反射镜610反射的光的路径长度增加选择的距离,该距离将路径长度增加光波长的选定部分。如上所述,驱动电极606可以是单个电极或多个电极,并且可以通过多个电压、通过施加到一个或多个驱动电极606的单个电压或其组合来驱动。在该示例中,铰链616与平台604在同一层中(如下文进一步解释)并且附接在平台604的相对侧。此外,铰链616在提供附接点和平台柱614之间的距离的点处附接到平台604。当由相对侧上的铰链616平衡时,铰链616在平行于平台柱614之间的线的平台侧面上的附接减小了平台604上的扭转力。对于平台604的给定偏转,与柱614的距离允许更大的铰链柔性和在铰链616上的更少的应力。
29.图7是示例投影系统700的示意图。透镜704将来自光源702的光准直到pslm 706上。光源702是相干光源,例如激光器或激光二极管。为了提供全色域,光源可以包括具有不同颜色的若干激光源。针对不同颜色的不同波长调整施加到pslm的像元的电压,并且颜色的投影的时间交错以提供所期望的颜色。菲涅耳透镜708是可选的。pslm 706反射光通过菲涅耳透镜708并因此在相移之后输出光。
30.图8是用于制造示例pslm中的示例像元的过程流程800的示意图。图9a-图9h(统称为“图9”)以一系列横截面视图图示了过程流程800的步骤。步骤802是通过在衬底上沉积并图案化第一导电层来形成平台电极和至少一个驱动电极。如图9a所示,在该步骤中,过程沉积导电层并且图案化导电层,例如铝、钛-铝、钛或氮化钛。例如,化学气相沉积(cvd)或物理气相沉积(pvd)形成厚度为至的导电层。光刻和蚀刻将导电层图案化以在衬底918上形成驱动电极906和平台电极912。衬底918是半导体集成电路(未示出)上的绝缘层,半导体集成电路耦合到驱动电极906和平台电极912并向其提供控制信号。在一个示例中,衬底918是二氧化硅。步骤804是在衬底上以及平台电极和(一个或多个)驱动电极上形成第一牺牲层。因此,第一牺牲层954形成在衬底918、(一个或多个)驱动电极906和平台电极912上,如图9b所示。用于第一牺牲层954的材料的示例包括二氧化硅、氮化硅、光刻胶、聚酰亚胺、锗、氧化锗、多晶硅、磷硅酸盐玻璃(psg)、硼磷硅酸盐玻璃(bpsg)和旋涂玻璃(sog)。用于形成第一牺牲层954的具体方法取决于所使用的材料。在一个示例中,第一牺牲层954是旋涂到厚度的sog。
31.步骤806是在第一牺牲层954中形成(一个或多个)柱开口以暴露平台电极,并且通
过在第一牺牲层上和(一个或多个)柱开口中沉积并图案化第二导电层来形成柱、铰链和平台。因此,如图9c所示,该步骤使用cvd或pvd沉积导电层(例如铝、钛-铝、钛或氮化钛)至至的厚度。导电层是使用光刻和蚀刻进行图案化和蚀刻的。该步骤在牺牲层954上形成与平台电极912、铰链916和平台904接触的两个平台柱914。步骤808是在柱、铰链、平台和第一牺牲层上形成第二牺牲层。如图9d所示,第二牺牲层956形成在柱914、铰链916、平台904和第一牺牲层954的暴露部分上,例如,厚度为第二牺牲层956的材料示例包括二氧化硅、氮化硅、光致抗蚀剂、聚酰亚胺、锗、氧化锗、多晶硅、磷硅酸盐玻璃(psg)、硼磷硅酸盐玻璃(bpsg)和旋涂玻璃(sog)。图9e是来自图9d的页面的顶部的平台904和铰链916的视图。
32.步骤810是在第二牺牲层中形成镜柱开口。如图9f所示,光刻和蚀刻在第二牺牲层956中形成镜柱开口907。步骤812是通过将第三导电层沉积到到的厚度来形成反射镜和镜柱,并且在第二牺牲层上和(一个或多个)镜柱开口中图案化和蚀刻第三导电层。在图9g所示,反射镜910在第二牺牲层956上并且反射镜柱908在开口907中的平台904上。步骤814是通过各向同性蚀刻去除第一牺牲层和第二牺牲层,留下图9h所示的结构。
33.在权利要求的范围内,在所描述的示例中修改是可能的,并且其他示例也是可能的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。