1.本发明涉及生物体内温度控制系统。
背景技术:
2.已知心房颤动是心律失常的一种,心房重复不规则的收缩从而血液循环恶化,引起不适感、倦怠感。因此,借助烧灼作为心房颤动的主要的发生源的肺静脉及其周边的左心房后壁等心肌组织的导管消融术(肺静脉隔离术)来治疗心房颤动的方法被广泛地进行。
3.另一方面,基于导管消融术的治疗时,烧灼部位(左心房)和食道接近,所以引起食道受到损伤而左房食道瘘、食道迷走神经麻痺等严重的食道并发症的危险性被指出,需要适当地管理食道内的温度。
4.作为进行食道内的温度管理的机构,如下的温度测定装置被报告:通过经由患者的鼻(经鼻的)或患者的口(经口的)的接近向食道内插入具备温度传感器的导管,借助温度传感器测定食道的内部温度,并且判断成内部温度到达阈值的情况下向外部输出警报(专利文献1)。
5.此外,如下的装置被报告:相对于在患者的心脏内进行消融的消融导管直接连接温度传感器和控制器,食道的内部温度越过不能允许水平(阈值)或既定值(温度)而上升的情况下,为了防止食道的过热及损伤,控制器自动地调节消融导管的输出(专利文献2)。
6.此外,如下的热交换球囊装配体被报告:作为食道冷却用的球囊导管适合插入食道,在外侧具备热传递表面且具备球囊内的内腔适合保持热交换媒介的能够扩张可能球囊(专利文献3)。
7.专利文献1:日本特开2016-119936。
8.专利文献2:日本特开2019-10500。
9.专利文献3:日本特表2009-504284。
10.然而,专利文献1中记载的装置在消融治疗时监视食道的内部温度,在判断成内部温度到达阈值的情况下向外部输出警报,由此能够在食道被加热或冷却而受到损伤前暂时采取中止消融等事前的措置,但警报的确认延迟的情况下,有必要的处置延迟的可能性。
11.专利文献2中记载的装置为,控制器与食道的内部温度对应地自动地控制消融的输出,所以操作者能够专心于消融的手艺。然而,控制消融的输出的情况下,有由于食道自然冷却而直至冷却会花费时间从而对于患者的负担变大的可能性。进而,由于进行消融的输出控制引起的过热的防止,所以不能直接对于例如低温球囊那样的通过冷却进行消融的导管应用。
12.专利文献3中记载的装置能够通过经由留置于食道内的球囊冷却食道来防止消融术时的食道损伤。然而,为了从消融术中的热损害防止食道损伤,需要在烧灼中的心脏附近的食道内使球囊扩张,反而有由于使食道接近烧灼源而提高食道损伤的风险的可能性。
技术实现要素:
13.因此,本发明的目的在于,提供具有监视食道等生物体器官的内部温度且与监视对应地直接调节器官侧的温度的机构的生物体内温度控制系统。
14.本发明人们为了解决上述问题而重复认真研究,结果,发现以下的(1)~(7)的发明。
15.(1)一种生物体内温度控制系统,其特征在于,具备导管、温度探针、液体存积部、泵、控制部,前述导管能够插入生物体内,前述温度探针具有温度传感器,能够插入前述导管,前述液体存积部存积温度得到了控制的液体,前述泵将来自前述液体存积部的液体供给至前述导管,前述控制部基于由前述温度探针检测到的信号控制前述泵的驱动,前述控制部在前述信号到达预先设定的阈值的情况下控制前述泵,前述泵以将前述液体存积部内的液体经由前述导管放出至外部的方式驱动。
16.(2)(1)中记载的生物体内温度控制系统,其中,前述控制部在到达预先设定的时间或温度的情况下控制前述泵,前述泵以将外部的液体经由前述导管抽吸的方式驱动。
17.(3)(1)或(2)中记载的生物体内温度控制系统,其中,具备检测前述导管的内部压力的压力传感器,前述控制部基于由前述压力传感器检测到的信号控制前述泵的驱动。
18.(4)(1)至(3)的任一项中记载的生物体内温度控制系统,其中,前述控制部使泵驱动,使得液体的抽吸时的转速比液体输送时的转速小。
19.(5)(1)至(4)的任一项中记载的生物体内温度控制系统,其中,具备将由前述温度探针检测到的信号用数码数字、柱状图或趋势图表述的显示器,具有由前述温度探针检测到的信号超过预先设定的阈值的情况下通过前述显示器上的数码数字、柱状图或趋势图的显示色的变化对操作者通知的机构。
20.(6)(1)至(5)的任一项中记载的生物体内温度控制系统,前述泵是输送用泵及抽吸用泵,前述控制部在液体输送时使前述输送用泵驱动,在液体的抽吸时使前述抽吸用泵驱动。
21.(7)一种控制生物体内温度控制系统的方法,前述生物体内温度控制系统具备导管、温度探针、液体存积部、泵、控制部,前述导管能够插入生物体内,前述温度探针具有温度传感器,能够插入前述导管,前述液体存积部存积温度得到了控制的液体,前述泵将来自前述液体存积部的液体供给至前述导管,前述控制部基于由前述温度探针检测到的信号控制前述泵的驱动,前述控制生物体内温度控制系统的方法的特征在于,包括前述控制部将由前述温度探针检测到的信号和预先设定的阈值比较的步骤、在判断为前述信号已经到达前述阈值的情况下前述控制部使前述泵以将前述液体存积部内的液体经由前述导管放出至外部的方式驱动的步骤。
22.发明效果根据本发明,温度探针测定生物体器官的内部温度且控制部感知到到达预先设定的温度的情况下,控制部驱动泵,将来自液体存积部的液体向导管外部自动地放出,由此,能够用液体将生物体器官的内部温度调节成既定的温度。由此,例如,基于消融术的心律失常治疗时,与食道的内部温度对应地自动对向食道内输送液体,由此,能够适当地管理消融术中的食道的内部温度。
附图说明
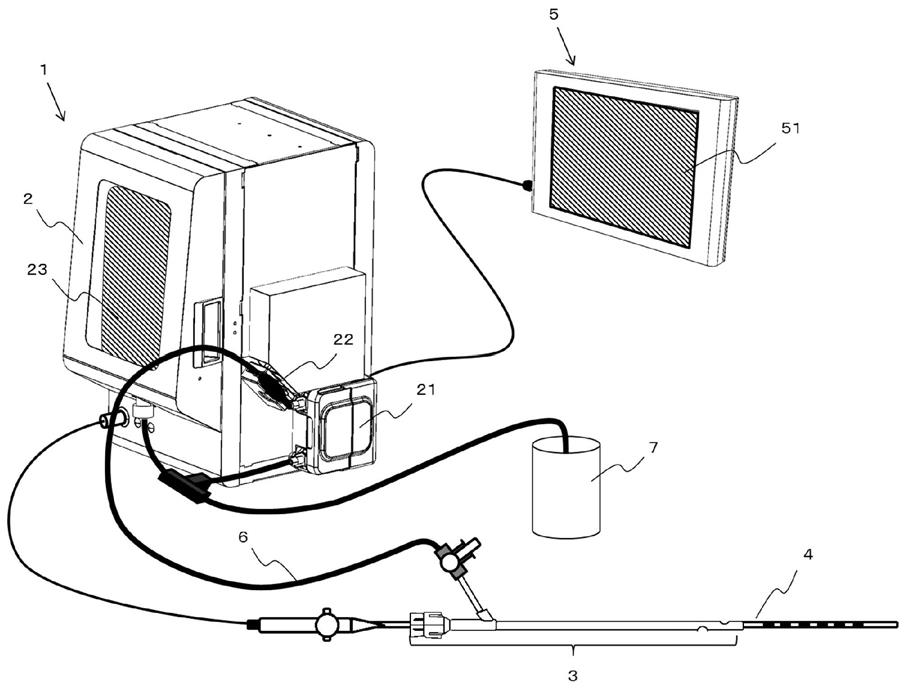
23.图1是本发明的第1实施方式的生物体内温度控制系统的外观图。
24.图2是表示图1所示的生物体内温度控制系统的内部构造的概略图。
25.图3是表示本发明的第2实施方式的生物体内温度控制系统的内部构造的概略图。
26.图4是表示图2的生物体内温度控制系统的输送抽吸兼用管的更具体的构成的概略图。
27.图5是表示图2的生物体内温度控制系统的输送时的液体的流动的概略图。
28.图6是表示图2的生物体内温度控制系统的抽吸时的液体的流动的概略图。
29.图7是表示本发明的生物体内温度控制系统的第1控制动作的时间图。
30.图8是表示本发明的生物体内温度控制系统的第1控制动作的控制部的动作流程的流程图。
31.图9是表示生物体内温度控制系统的第2控制动作的时间图。
32.图10是表示本发明的生物体内温度控制系统的第2控制动作的控制部的动作流程的流程图。
33.图11是表示使用本发明的生物体内温度控制系统的温度测定的结果的图。
具体实施方式
34.以下,结合图来说明本发明的具体实施方式,但本发明不被这些方式限定。此外,能够在不脱离发挥本发明的效果的范围的范围内适当改变。另外,对于同一要素使用同一附图标记。
35.<第1实施方式>图1是第1实施方式的生物体内温度控制系统1的外观图。生物体内温度控制系统1例如在用借助高频电流加热球囊内的球囊消融导管进行消融术时,能够用于监视接近消融对象的心脏的食道的内部温度且借助液体冷却食道的内部温度。能够应用生物体内温度控制系统1的生物体器官不被特别限定,也可以应用于咽头、喉头、肺、食道及胃等,但特别优选地用于食道内部的冷却。
36.这里,生物体内温度控制系统1具备生物体内温度控制装置2、导管3、温度探针4、显示器5、输送抽吸兼用管6、废液部7,前述生物体内温度控制装置2向导管3进行温度得到了控制的液体的输送或抽吸,前述导管3具有能够将液体向生物体内输送
・
抽吸的孔,能够插入生物体内,前述温度探针4具有温度传感器,能够插入导管3,前述显示器5能够显示来自温度探针4的信号,前述输送抽吸兼用管6与泵21和压力传感器22连接,将生物体内温度控制装置2和导管3相连。
37.图2是表示图1所示的生物体内温度控制装置2的内部构造的概略图。
38.生物体内温度控制装置2具备泵21、压力传感器22、液体存积部23、控制部24,前述泵21进行朝向导管3的液体的输送或抽吸,前述压力传感器22检测导管3的内部压力,前述液体存积部23存积温度得到了控制的液体,前述控制部24基于从温度探针4检测的信号或从压力传感器22检测的信号控制泵的驱动。
39.生物体内温度控制装置2具备的泵21是滚柱式的管泵,能够通过使泵21的滚柱正转来从液体存积部23相对于导管3输送液体,能够通过使泵21的滚柱反转来从导管3的末端
部或孔抽吸液体。
40.泵21所用的泵的驱动方式不被限定,但优选地使用能够保持相对于生物体内输送或抽吸的液体的清洁性而液体的流量管理容易的管泵,更优选为滚柱式、钩爪式的管泵。
41.此外,生物体内温度控制装置2也可以具备多个泵。例如,作为除了第1实施方式之外的方式,图3中表示具备两个泵的生物体内温度控制装置2。该情况下,生物体内温度控制装置2个别地具备输送用泵211和抽吸用泵212。导管3在具备具有输送用管腔和用于抽吸液体的抽吸用管腔的多管腔的情况下,将输送用泵211和抽吸用泵212与连通于各自的管腔的端口连接,由此,能够同时实施液体的输送动作及抽吸动作。借助上述的结构,能够向生物体内持续输送液体,且能够将已进行热交换的液体向体外排出,所以能够高效率地进行生物体内的温度控制。
42.生物体内温度控制装置2具备的压力传感器22由接触型位置位移计221、与接触型位置位移计221接触的输送抽吸兼用管6的膨胀部61构成。输送抽吸兼用管6的膨胀部61是输送抽吸兼用管6的一部分成形为袋状的部分,被设计成由于管内的压力而膨胀或收缩。因此,借助接触型位置位移计221将膨胀部61的位移量作为信号检测,由此能够经由输送抽吸兼用管6测定与输送抽吸兼用管6连接的导管3的内部压力。
43.压力传感器22的检测方式不被限定,也可以检测输送或抽吸动作中的导管3的内压,只要能够向控制部24作为信号输送则可以是任何检测方式。例如,作为除了第1实施方式之外的方式,也可以使用附加隔膜式的串联压力传感器的方法、从输送抽吸兼用管6使细管分岔来测定细管的压力的方法。
44.第1实施方式的生物体内温度控制系统1的液体存积部23为被普通地市售的生理食盐液、葡萄糖液等的输液袋,为能够内置于生物体内温度控制装置2内的构造。此外,生物体内温度控制装置2以与液体存积部23接触的方式配置有珀耳帖元件231及测定液体存积部23内部的温度的未图示的装置内温度传感器,基于从装置内温度传感器检测的信号,控制珀耳帖元件231的温度,由此能够进行存积于液体存积部23内的液体的温度控制。进行基于热球囊的导管消融术的情况下,液体存积部23内部的液体的温度优选地被控制成0℃~15℃,更优选地被控制成0℃~10℃。
45.液体存积部23只要能够存积生理食盐液等液体则可以是任何方式,可以内置于生物体内温度控制装置2,也可以处于生物体内温度控制装置2的外部。液体存积部23内置于生物体内温度控制装置2的情况下,如上所述,优选地进行液体存积部23的液体的温度控制。作为除了第1实施方式之外的方式,也可以取代珀耳帖元件231而借助冰等保冷剂冷却输液袋,也可以将已预先冷冻的输液袋解冻的同时来使用。此外,作为使用的液体,除了生理食盐液、葡萄糖液以外也能够使用精制水、自来水。
46.此外,用于低温消融的情况下,用于癌治疗(特别是咽头癌、喉头癌、肺癌、食道癌及胃癌)用的高频过热(温热)治疗的情况下与通常情况相比需要更将生物体内加热,但也可以对其使用本发明的生物体内温度控制系统。该情况下,也可以利用发热电阻将存积于液体存积部23的液体的温度加热至30~45℃。
47.生物体内温度控制装置2具备的控制部24控制泵21,基于从温度探针4检测的信号,以将液体存积部23的液体经由导管3向外部放出的方式驱动泵21。关于具体的控制动作在后说明。并且,生物体内温度控制装置2具备的控制部24优选地,具备用于基于由压力传
感器22检测的信号控制泵21的驱动的回路。例如,第1实施方式的生物体内温度控制系统1的控制部24具备能够将与来自输送抽吸兼用管6的位移量相关的信息数值转换成压力信息的结构。
48.此外,控制部24优选地,具备用于基于从测定液体存积部23内部的温度的装置内温度传感器检测的信号控制液体存积部23的内部温度的回路。
49.导管3为能够通过经鼻的或经口的接近来向生物体内插入的筒状的部件,能够穿过管腔从导管末端或表面处打开的孔将液体输送或抽吸。导管3作为具体的构造具有能够插入生物体内的管部31、在管部31的长边方向上的基端侧固定的带阀的接头32。
50.管部31的材料只要是具有能够经鼻或经口地向生物体内插入的可挠性的材料则能够使用任何材料,例如,能够使用聚氯化乙烯基、聚氨酯、硅酮等热塑性树脂。此外,为了确认向生物体内的留置部位,配合具有x射线造影性的材料更好。
51.例如,将管部31从鼻经鼻地向生物体内插入的情况下,管部31的长度优选为200mm~1000mm左右,外径优选为φ1.7mm~6.0mm左右,内径优选为φ1.0mm~5.0mm左右。
52.带阀的接头32被固定于管部31的基端侧,能够与输送抽吸兼用管6连接,具备用于从管部31的末端侧将液体输送或抽吸的端口321、用于在将温度探针4向导管3插入的情况下固定温度探针4的阀322。阀322更可以是阀能够通过旋转运动等开闭。通过设为上述结构,在阀322的开放时温度探针4能够操作,在阀322的关闭时温度探针4能够固定。
53.作为除了第1实施方式之外的方式,如图3所记载的那样,导管3的带阀的接头32也可以具备第1端口323和第2端口324。将连接于液体存积部23和输送用泵212的输送用管600与第1端口323连接,将连接于抽吸用泵212和废液部7的抽吸用管601和第2端口324连接,由此,能够使输送管线和抽吸管线独立。由此,能够总将被冷却的液体向生物体内输送。
54.进而,也可以是,导管3是多管腔,前述多管腔具有用于输送液体的输送用管腔和用于抽吸液体的抽吸用管腔,第1端口323是连通于输送用管腔的输送端口,第2端口324是连通于抽吸用管腔的抽吸端口。由此,能够同时实施液体的输送动作及抽吸动作。
55.温度探针4是用于被经鼻或经口地向生物体内插入来测定生物体器官的内部温度的部件,由被插入生物体内的轴部41、配置于末端侧的温度传感器42、手柄部43构成。
56.轴部41的材料只要是具有能够经鼻或经口地向生物体内插入的可挠性的材料则能够使用任何材料,能够使用聚醚嵌段酰胺、聚氨酯、尼龙、聚烯烃、聚酰胺及聚醚聚酰胺等热塑性树脂。
57.作为轴部41的外径,优选为φ1.0mm~4.0mm左右,另外只要是能够插通至导管3的内腔的直径即可。此外,作为长度,优选为300mm~1100mm左右,向导管3的内腔插入来使用的情况下,优选为在从导管3的末端侧突出的位置配置有轴部41上的温度传感器42。
58.轴部41也可以具备能够通过手柄部43的操作而末端侧转向的功能。由此,特别地在对食道应用的情况下,将温度探针4经鼻或经口地插入食道内时,能够减少向气道偏离的风险。此外,食道从咽头部至胃的喷门并非直线而是蜿蜒地行进,所以通过转向操作,能够将温度传感器42配置于作为目的的食道部位。
59.温度传感器42被在轴部41的末端侧安装一个以上,但在生物体器官内,为了能够测定更广阔区域的内部温度,优选地具有多个温度传感器42。
60.作为温度传感器42的材料,只要是热传导性的良好的材料则可以使用任何材料,
为了测定接近消融部位的部位的温度,另外可以具有x射线造影性。
61.手柄部43具备用于与生物体内温度控制装置2连接的接头431,第1实施方式的生物体内温度控制系统1经由连接缆线44与生物体内温度控制装置2和温度探针4连接。
62.显示器5能够将由温度探针4检测到的生物体内的内部温度信息以数码数字、柱状图或趋势图表述。此外,显示器5具有能够在生物体器官内的温度超过预先设定的阈值的情况下显示色变化来将温度变化作为视觉信息向操作者提示的功能。例如,也可以设定成随着温度从低温上升至高温而从冷色变为暖色。由此,能够将在生物体内的长边方向上配置的温度探针4检测的温度与生物体内的位置呼应地确认,所以操作者能够在感觉上掌握生物体器官的哪个部位与其他部位相比温度上升。此外,与数码数字的显示并行地以柱状图表示温度,所以能够在生物体内的各部位进行温度比较。进而,能够在视觉上向操作者传递生物体器官受到损伤的风险越高则生物体的内部温度越上升。
63.此外,优选地,显示器5具有将液体的输送
・
抽吸的动作信息和系统中已发生的错误以及警报等警告信息及运转时间、液体的输送
・
抽吸的次数以及输送量等运转信息向操作者提示的功能。由此,能够在视觉上或听觉上向操作者传递工作状况、不良情况状态及危险状态。
64.此外,优选地,显示器5具备触摸屏显示器51,能够输入系统的工作的各种参数,且能够将已输入的参数向生物体内温度控制装置2的控制部24传递。由此,操作者能够从离开的位置进行生物体内温度控制装置2的运转的开始
・
停止及各种参数的设定
・
改变。
65.输送抽吸兼用管6为,用于在液体的输送时将液体从液体存积部23经由泵21送达至导管3、在液体的抽吸时将液体从导管3送达至废液部7的管。这里,废液部7是用于在来自体内的液体抽吸后存积不要的液体的部位。
66.如图4中记载的那样,生物体内温度控制系统1具有的输送抽吸兼用管6具备膨胀部61、流路切换部62、用于与液体存积部23连接的液体供给端口63及用于与导管3连接的连接端口64。
67.膨胀部61如前所述是成形为袋状的管,设计成由于管内的压力而膨胀
・
收缩。由此,通过借助接触型位置位移计221检测膨胀部61的位移量,能够测定经由输送抽吸兼用管6与输送抽吸兼用管6连接的导管3的内压。
68.第1实施方式的流路切换部62是三通止回阀621,与泵21的一次侧连接。由此,输送液体的情况下,如图5中记载的那样,泵21正转,由此,三通止回阀621的流路切换成将液体存积部23和泵21连接的方向,液体流向导管3。此外,从导管3抽吸液体的情况下,如图6中记载的那样,泵21反转,由此,三通止回阀621的流路切换成将泵21和废液部7连接的方向,被抽吸的液体被向废液部7排出。另外,图5及图6的虚线箭头和实线箭头表示上述泵21的旋转方向和液体的流动。
69.作为除了第1实施方式之外的方式,也可以不使用三通止回阀而将具备分岔成t字的输送抽吸兼用管和两个夹阀的装置作为流路切换部62。该情况下,生物体内温度控制装置2还具备夹阀,优选地,控制部24控制成,配合泵驱动将生物体内温度控制装置2内的夹阀开闭从而切换流路。
70.液体供给端口63只要能够将液体从液体存积部23供给至输送抽吸兼用管6内则可以是任意方式。由于液体存积部23为输液袋,所以第1实施方式的液体供给端口63优选为能
够刺通输液袋的针631。
71.连接端口64若能够与导管3连接则可以是任意方式,但优选为三向旋塞阀。由此,生物体内温度控制系统功能不全时,能够通过连接注射器等来进行基于手动的液体的输送
・
抽吸。
72.以下,借助图7,说明表示基于导管消融术的心律失常治疗时生物体内温度控制系统为了将食道的内部温度保持恒定的第1控制动作的时间图。
73.步骤1:温度信息与阈值的比较处理在左心房附近烧灼心脏组织的导管消融术开始时,接近的食道的内部温度逐渐上升,借助温度探针4的各温度传感器42测定的食道的内部温度也逐渐上升。借助控制部24开始被冷却的液体(冷却水)的输送的食道的内部温度的阈值能够被预先设定,总进行温度传感器42的温度信息和上述阈值的比较处理。
74.步骤2:液体(冷却水)的输送动作多个温度传感器42的至少一个温度信息到达上述阈值时,从控制部24向泵21输出输送速度和输送时间的驱动指令,液体(冷却水)被从液体存积部23经由输送抽吸兼用管6向导管3输送。液体(冷却水)到达食道内的温度上升部位,由此,能够通过与液体(冷却水)的热交换来将食道内冷却。液体(冷却水)的输送量被以输送速度和输送时间管理,能够预先在控制部24处设定。液体(冷却水)优选地短时间地输送,具体地优选为以1ml/min~300ml/min的输送速度的输送。
75.步骤3:将液体(冷却水)留在食道内的动作步骤3的动作时间能够预先在控制部24处设定,经过设定时间后过渡至步骤4。此外作为另外的方法,也可以使用如下方法:监视食道的内部温度,在食道的内部温度到达预先设定的温度的时刻过渡至步骤4。
76.步骤4:已向食道内输送的液体的抽吸动作为防止已输送的液体向气管流出引起的误咽,优选地,能够将已输送的液体全量抽吸。此外,若在短时间抽吸液体则有由于过抽吸而导致食道损伤的可能性,使用优选地设定成与输送速度相比为低速。具体地,优选为以1ml/min~100ml/min的抽吸速度的抽吸。抽吸时间能够预先在控制部24处设定,但也可以通过输送量除以抽吸速度来算出能够全量抽吸的抽吸时间。此外,也可以通过输送量、抽吸量除以抽吸时间来算出抽吸速度,能够进行各种改变。
77.此外,作为另外的抽吸方法,也可以使用输送抽吸兼用管6的压力变化。具体地,若将液体从食道内全量抽吸后也继续抽吸,则食道扁平而导管3闭塞,从而输送抽吸兼用管6内的内压为负压。因此,借助压力传感器22检测输送抽吸兼用管6内的内压,将该信号向控制部24传送,由此,将液体的全量抽吸,或者,在没有食道内的液体的时刻,控制部24能够停止泵21的驱动。更具体地,优选为,输送抽吸兼用管6内的内压在-20kpag~-90kpag的范围停止抽吸动作。
78.步骤4的动作后再次返回步骤1,以后重复步骤1~4,由此,能够保持成适当的食道温度。另外,第1控制动作为由于基于高频消融术等的心肌的热烧灼而食道的内部温度上升的情况的控制动作,所以制作回路,使得控制部24将食道温度超过阈值的情况判断成到达阈值。然而,由于冷冻消融术等而食道的内部温度下降的情况下,在上述的第2控制动作中,
将输送的液体改变成加热水,并且制作回路,使得控制部24将食道温度不足阈值的情况判断成到达阈值,由此能够控制食道的内部温度。
79.关于表示上述第1控制方法的控制部24的动作流程例的流程图,利用图8进行说明。
80.该动作流程例中,首先,操作者操作与生物体内温度控制装置2连接的显示器5的触摸屏显示器51,由此,输送开始温度、输送量、输送速度、抽吸开始温度、抽吸开始时间、抽吸量、抽吸速度、抽吸停止时间及抽吸停止压力中的必要的某数值被向控制部24预先设定。
81.接着,若操作者进行自动运转的开始,则控制部24从与生物体内温度控制装置2连接的温度探针4的温度传感器42检测信号(例如,热电动势),转换成温度信息(生物体内温度)。
82.接着,控制部24比较数值,判断从温度传感器42取得的温度信息的至少一个是否到达预先设定的阈值即输送开始温度,即是否满足液体(冷却水)的输送的开始条件。控制部24判断成生物体内温度的至少一个温度到达预先设定的阈值即输送开始温度的情况下,控制部24将泵21驱动(正转),从液体存积部23开始液体(冷却水)的输送。液体(冷却水)的输送开始后,配合泵21的驱动开始计时器的计数(计时器1),继续液体(冷却水)的输送直至到达根据预先设定的输送量及输送速度算出的输送时间。到达算出的输送时间后,控制部24停止泵21的驱动。
83.另一方面,判断成任何生物体内温度均到达输送开始温度的情况下,为不需要用于温度控制的输送的正常温度范围内,所以控制部24继续取得生物体内温度,判断是否满足液体(冷却水)的输送的开始条件。
84.液体(冷却水)的输送完成后,控制部24开始计时器的计数(计时器2),判定计时器2的计数是否到达预先设定的阈值即抽吸开始时间,即是否满足抽吸的第1开始条件。这里,判断成满足抽吸的第1开始条件的情况下,控制部24将泵21驱动(反转),从生物体内开始液体的抽吸。另一方面,未判断成计时器2的计数到达抽吸开始时间的情况下,接下来,控制部24判断已取得的生物体内温度的至少一个温度是否到达预先设定的阈值即抽吸开始温度以上,即是否满足抽吸的第2开始条件。抽吸的第2开始条件中,生物体内温度不足预先设定的阈值即抽吸开始温度的情况下,再次开始计时器2的计数,判定是否满足抽吸的第1开始条件。另一方面,判断成生物体内温度到达预先设定的阈值即抽吸开始温度的情况下,控制部24判定是否满足输送的开始条件。
85.输送的开始条件下,生物体内温度的至少一个的温度在生物体内温度到达预先设定的阈值即输送开始温度以上的情况下,为了将生物体内温度控制在正常温度范围,控制部24将泵21驱动(正转),从液体存积部23开始液体的输送。另一方面,生物体内温度不足预先设定的阈值即输送开始温度的情况下,控制部24将泵21驱动(反转),从生物体内开始液体的抽吸。
86.液体的输送完成后,控制部24开始计时器2的计数,重复液体的输送的动作至满足抽吸的第1开始条件及抽吸的第2开始条件,但不进行抽吸的开始而输送被重复实施的情况下,液体的过剩投给引起的误咽的风险提高,所以希望鸣响警报来对操作者通知异常。未判断成满足输送的开始条件的情况下,控制部24继续判断是否满足抽吸的开始条件,接着,判定是否满足输送的开始条件。
87.抽吸开始后,与泵21的驱动配合地开始计时器的计数(计时器3),判断计时器3的计数是否到达预先设定的抽吸停止时间,即,是否满足抽吸的第1停止条件。抽吸停止时间也可以利用根据预先设定的抽吸量及抽吸速度算出的机构。判断成计时器3到达抽吸时间的情况下,控制部24停止泵21的驱动。另一方面,未判断成到达抽吸时间的情况下,接着,控制部24基于由压力传感器22检测的信号算出管内压,判定管内压是否为预先设定的阈值即抽吸停止压力以下,即是否满足抽吸的第2停止条件。判断成管内压为预先设定的阈值即抽吸停止压力以下的情况下,控制部24停止泵21的驱动。
88.未判断成管内压到达预先设定的阈值即抽吸停止管内压以下的情况下,控制部24判断是否满足液体(冷却水)的输送的开始条件。这里,判断成生物体内温度的至少一个的温度满足输送的开始条件的情况下,为了将生物体内温度控制在正常温度范围,控制部24使泵21的驱动从反转转换成正转,从液体存积部23开始液体(冷却水)的输送。另一方面,未判断成到达输送开始温度的情况下,控制部24重复判断是否满足抽吸的停止条件,接着,重复判断是否满足输送的开始条件。
89.液体的抽吸完成后,控制部24再次判定是否满足液体(冷却水)的输送的开始条件,根据上述的流程进行生物体内的温度控制直至操作者进行自动运转的停止。
90.此外,作为用于生物体内温度控制系统将食道温度保持成恒定的另外的控制方法,利用图9对表示第2控制方法的时间图进行说明。
91.控制部24处能够预先设定多个食道温度的阈值和与其对应的液体的输送速度,能够与设定温度对应地持续地输送已冷却的液体(冷却水)。图9中表示在3级间设定的情况,但操作者能够任意地设定级数。
92.步骤1:温度信息和阈值的比较处理在左心房附近开始烧灼心脏组织的导管消融术时,接近的食道的温度逐渐上升,温度探针4的各温度传感器42所测定的食道温度也逐渐上升。借助控制部24总进行各温度传感器42的温度信息与上述多个阈值的比较处理。
93.步骤2:液体(冷却水)的输送动作被测定的温度传感器42的至少1处的温度信息到达第1食道温度的阈值(第1阈值)时,从控制部24向泵21输出第1输送速度的驱动指令,已被冷却的液体(冷却水)被从液体存积部23经由输送抽吸兼用管6向导管3输送。进而,导管消融术进行,食道的内部温度上升,被测定的食道的内部温度的至少1处的温度信息到达第2食道温度的阈值(第2阈值)时,从控制部24向泵21输出第2输送速度的驱动指令。之后,与食道温度的上升对应地,过渡至第3设定。
94.此外,由于液体(冷却水)的输送而食道的内部温度与第n温度阈值相比下降的情况下,控制成向泵21输出第n-1的输送速度的驱动指令,与第1阈值相比温度下降的情况下,停止液体(冷却水)的输送。消融术中通过重复步骤2的控制,能够与食道的内部温度的上升、下降配合地以适当的流量输送液体(冷却水),能够更有效果地将食道内冷却。
95.此时,优选为,若第一输送速度<第二输送速度<
・・・
<第n输送速度,则与食道温度的上升对应,液体(冷却水)的输送速度增加。具体地,优选为在1~300ml/min的范围内设定输送速度。进一步优选地,设定成食道的内部温超过温度阈值(例如,作为危险的内部温度将40℃作为阈值设定。)的情况的输送速度为高速(具体地为200ml/min~300ml/min),至
超过阈值前的输送速度为低速(具体地为1ml/min~50ml/min)。由此,能够减少由于液体(冷却水)的过剩投给引起的误咽的风险。
96.步骤3:已输送至食道内的液体的抽吸动作为了防止持续地输送的液体引起的误咽,优选地,输送量的累积值超过设定的量的情况下进行抽吸动作。开始液体的抽吸的累积输送量能够作为抽吸开始累积输送量在预先控制部24处设定。此外,与第1控制方法相同地,若短时间抽吸液体则有由于过抽吸而导致食道的损伤的可能性,所以优选地设定成与输送速度相比为低速。
97.此外,作为另外的抽吸方法,也可以利用输送抽吸兼用管6的压力变化。具体地,若将液体从食道内全量抽吸后也继续抽吸,则食道扁平而导管3闭塞,从而输送抽吸兼用管6内的内压为负压。因此,借助压力传感器22检测输送抽吸兼用管6内的内压,将该信号向控制部24传送,由此,将液体的全量抽吸,或者,在没有食道内的液体的时刻,控制部24能够停止泵21的驱动。更具体地,优选为,输送抽吸兼用管6内的内压在-20kpag~-90kpag的范围停止抽吸动作。
98.步骤3的动作后再次返回步骤1,之后重复步骤1~3,由此能够保持成适当的食道温度。另外,第2控制方法为基于高频消融术等的心肌的热烧灼而食道的内部温度上升的情况的控制方法,所以制作回路,使得控制部24将食道温度超过阈值的情况判断成到达阈值。然而,由于冷冻消融术等而食道的内部温度下降的情况下,在上述的第2控制方法中,将输送的液体改变成加热水,并且制作回路,使得控制部24将食道温度不足阈值的情况判断成到达阈值,由此能够控制食道的内部温度。
99.关于表示上述第2控制方法的控制部24的动作流程的流程图,利用图10进行说明。
100.该动作流程例中,首先,操作者操作与生物体内温度控制装置2连接的显示器5的触摸屏显示器51,由此,第1~n食道温度的阈值、第1~n输送速度、抽吸开始累积输送量及抽吸速度中的必要的某数值被向控制部24预先设定。这里,第n输送速度为到达第n食道温度的阈值时被输送的速度。
101.接着,若操作者进行自动运转的开始,则控制部24从与生物体内温度控制装置2连接的温度探针4的温度传感器42检测信号(例如,热电动势),转换成温度信息(生物体内温度)。
102.接着,控制部24比较数值,判断已取得的生物体内温度的至少一个温度是否到达预先设定的第1~第n阈值即食道温度,即是否满足液体(冷却水)的输送的开始条件。具体地,控制部24判断成生物体内温度到达第n-1阈值的食道温度且未到达第n阈值的食道温度的情况下,控制部24将泵21驱动(正转),以第n-1输送速度实施输送。这里,生物体内温度未到达第1阈值的食道温度且泵21驱动的情况下,控制部24停止泵21的驱动。此外,生物体内温度到达第n阈值的食道温度的情况下,控制部24将泵21的驱动,以第n输送速度进行输送。
103.液体的输送中,控制部24根据输送速度及输送时间算出总输送量,并且判断总输送量是否到达抽吸开始累积输送量。总输送量到达抽吸开始累积输送量的情况下,控制部24使泵21从正转转换成反转,从生物体内开始液体的抽吸。抽吸开始后,控制部24基于由压力传感器22检测的信号算出管的内压,持续抽吸,直至管内压为预先设定的阈值即抽吸停止压力以下,即将液体全量抽吸,或者直至没有食道内的液体。
104.液体的抽吸完成后,控制部24再次判断是否满足液体(冷却水)的输送的开始条
件,根据上述的流程图进行生物体内的温度控制直至操作者进行自动运转的停止。
实施例
105.以下,结合附图说明本发明的生物体内温度控制系统1的具体的实施例。
106.制作图1及图2所示的本发明的生物体内温度控制系统1。
107.泵21是滚柱方式的管泵的兼用输送
・
抽吸的泵,能够将输送速度及抽吸速度在1ml/min~300ml/min的范围内任意地设定可能。
108.对于压力传感器22使用接触型位置位移计221,能够在-80kpag~150kpag的范围测定输送抽吸兼用管6的内力。
109.对于液体存积部23,使用500ml的生理食盐液袋,使用珀耳帖元件231将生理食盐液袋冷却,由此,将冷却水(生理食盐液)的温度保持在0℃~10℃的范围内。
110.将能够实施上述第1控制方法的回路加入至控制部24。具体地,将如下控制方法加入至控制部24:从温度传感器42得到的温度中的至少1处的温度到达预先设定的阈值时,控制泵21,以设定的液量及流量将液体从液体存积部23经由导管3向外部放出。此外,将如下方法加入至控制部24:到达设定的抽吸开始时间或抽吸开始温度以下时控制泵21从生物体内开始液体的抽吸的控制方法、设定的抽吸停止时间或从压力传感器22得到的压力到达预先设定的阈值即抽吸停止压力时停止液体的抽吸的控制方法。
111.导管3的管部31设置为外径φ4.7mm、内径3.3mm,在把手部配置具备用于与输送抽吸兼用管6连接的端口321、用于固定温度探针4的阀322的带阀的接头32。
112.温度探针4的轴部41设为外径2.0mm,在距轴部41的末端侧20mm的位置在6处配置有温度传感器42。
113.在输送抽吸兼用管6配置有用于与生理食盐液袋连接的瓶针,在流路切换部配置有三通止回阀、与泵21连接的管部31、用于作为检测输送抽吸兼用管6的内部压力的压力传感器22将膨胀部61与接触型位置位移计221及导管3连接的连接部。
114.(基于冷却水的输送及抽吸的冷却效果确认实验)以从导管3的末端部突出的方式将温度探针4的温度传感器42插入及固定化后,留置于模拟食道内。之后,将输送抽吸兼用管6与生物体内温度控制装置2和导管3连接,设定成,在6处的温度传感器42的某1处的温度到达38℃时,15ml的冷却水被以流量300ml/min输送。此外,分别设定抽吸开始时间、抽吸开始温度、抽吸量、抽吸速度及抽吸停止压力的数值,预先设定动作,使得输送后30秒钟或6处的温度传感器42的某1处到达36℃时将冷却水以流量60ml/min抽吸,在从抽吸开始20秒钟或压力传感器22到达-50kpag的情况下,冷却水的抽吸停止。
115.图11表示将模拟食道的内部温度控制成40℃后、开始生物体内温度控制系统1的自动运转时温度探针4检测到的模拟食道温度、泵21的输送流量及抽吸流量。温度探针4被体温加热至38℃时,控制部24判断成从温度探针检测到的信号超过阈值,基于预先设为程序的动作开始泵21的输送动作而冷却水被输送至食道内。由此,可知食道的内部温度被暂时冷却至27~33℃左右。输送后,冷却水基于预先设为程序的动作被抽吸且温度探针4被体温加热,所以温度探针4的测定温度逐渐上升,到达38℃时再次输送冷却水。根据图11能够确认,重复输送及抽吸动作,由此,食道的内部温度总被冷却至38℃以下。
116.产业上的可利用性本发明提供在医疗领域中在术中的体腔的内部温度变化时能够自动地控制体腔的内部温度的系统。
117.附图标记说明1
・・・
生物体内温度控制系统、2
・・・
生物体内温度控制装置、3
・・・
导管、4
・・・
温度探针、5
・・・
显示器、6
・・・
输送抽吸兼用管、7
・・・
废液部、21
・・・
泵、22
・・・
压力传感器、23
・・・
液体存积部、24
・・
控制部、31
・・・
管部、32
・・・
带阀的接头、41
・・・
轴部、42
・・・
温度传感器、43
・・・
手柄部、44
・・・
连接缆线、51
・・・
触摸屏显示器、61
・・・
膨胀部、62
・・・
流路切换部、63
・・・
液体供给端口、64
・・・
连接端口、211
・・・
输送用泵、212
・・・
抽吸用泵、221
・・・
接触型位置位移计、231
・・・
珀耳帖元件、321
・・・
端口、322
・・・
阀、323
・・・
第1端口、324
・・・
第2端口、431
・・・
接头、600
・・・
输送用管、601
・・・
抽吸用管、621
・・・
三通止回阀、631
・・・
针。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
