机械辅助的充气装置手柄及使用方法
相关申请
1.本技术要求2019年9月23日提交的名称为“mechanically assisted inflation device handle and method of use[机械辅助的充气装置手柄及使用方法]”的美国临时申请号62/904,298的优先权,该申请特此通过援引以其全文并入。
技术领域
[0002]
本披露内容总体上涉及特别是在医疗装置中用于对流体进行加压、减压或以其他方式使流体移位的装置。更具体地,本披露内容涉及用于对流体进行加压、减压或以其他方式使流体沿管线移位以便对医疗装置(比如气囊)进行充气或放气的装置。
附图说明
[0003]
结合附图,从以下描述和所附权利要求中,本文披露的实施例将变得更加清楚。这些附图仅描绘了典型的实施例,通过使用附图将更具体且详细地来描述这些实施例,在附图中:
[0004]
图1是充气装置的立体图。
[0005]
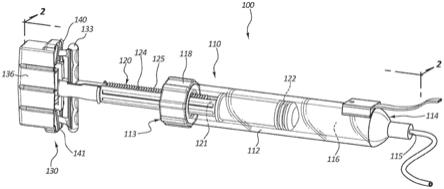
图2是图1的充气装置穿过图1的平面2-2截取的截面图。
[0006]
图3是图1的充气装置的分解视图。
[0007]
图4是图1的充气装置的手柄的一部分的分解视图。
[0008]
图5是图1的充气装置的一部分的截面图。
[0009]
图6是图1的充气装置的截面图,其中流体设置在该装置的一部分中。
[0010]
图7a是处于图2所示构型下图1的手柄的一部分沿图2的线7a-7a截取的详细视图。
[0011]
图7b是处于图6所示构型下图1的手柄沿图6的线7b-7b截取的详细部分的视图。
[0012]
图8a是处于图2和图7a的构型下图1的充气装置的螺纹部分的截面图。
[0013]
图8b是处于图6和图7b的构型下图8a的充气装置的螺纹部分的截面图。
[0014]
图9是图1的充气装置的立体图,其中流体设置在该装置内并且气囊联接到充气装置。
具体实施方式
[0015]
充气装置可以包括注射器,该注射器利用螺纹通过使柱塞手柄相对于注射器的本体旋转来推进或缩回柱塞,使得螺纹引起柱塞相对于本体的纵向移位。在一些情况下,充气注射器可以进一步包括可缩回的螺纹,使得医生能够使得螺纹脱离接合并且通过简单地推动或拉动柱塞来使柱塞移位。
[0016]
比如美国专利号5,047,015、5,057,078、5,163,904和5,209,732等中所描述的某些充气装置在装置的手柄中包括机构,该机构允许医生通过操纵该机构来使得螺纹脱离接合。例如,在一些情况下,这样的装置的手柄可以包括“触发”部分,该部分可以被配置为当触发器被致动时使定位在柱塞上的螺纹缩回。
[0017]
充气装置可以进一步被配置成使得螺纹缩回机构包括提供机械促推(advantage)的元件,从而允许使用者更容易地操纵该机构。此外,机构可以被配置为改变输入力的位置,这可以使得对装置的操作灵活且容易。
[0018]
受益于本披露内容的本领域普通技术人员将容易理解,如本文的附图中总体描述和展示的实施例的部件可以以多种多样的不同构型来布置和设计。因此,以下对如附图所示的各种实施例的更详细的描述并不旨在限制本披露内容的范围,而仅仅是各种实施例的表示。虽然在附图中呈现了实施例的多个不同的方面,但是除非特别指出,否则附图不一定按比例绘制。
[0019]
短语“连接到”、“联接到”和“与
……
连通”是指两个或多个实体之间的任何形式的相互作用,包括机械相互作用、电气相互作用、磁性相互作用、电磁相互作用、流体相互作用和热相互作用。即使两个部件彼此没有直接接触,它们也可以彼此联接。例如,两个部件可以通过中间部件彼此联接。
[0020]
方向性术语“远侧”和“近侧”在本领域中具有其普通含义。也就是说,医疗装置的远侧端是指装置在使用期间离医生最远的一端。近侧端是指相反端,或在使用期间离医生最近的一端。具体应用于充气装置的注射器部分时,注射器的近侧端是指离手柄最近的一端,并且远侧端是指相反端,即离注射器的入口/出口端口最近的一端。因此,如果医生在手术中的一个或多个点改变注射器的取向,如本文所使用的术语“近侧端”始终是指注射器的手柄端(即使远侧端暂时地更靠近医生)。
[0021]“流体”以其最广泛的含义使用,以指代任何流体,包括液体和气体以及通常表现为流体的溶液、复合物、悬浮液等。
[0022]
图1至图9展示了充气装置的不同视图。在某些视图中,装置可以联接到并非每个视图中都包括的附加部件或与其一起示出。进一步地,在一些视图中,仅展示了选择的部件,以提供部件关系的细节。一些部件可能会在多个视图中示出,但不会结合每个视图进行讨论。结合任何附图提供的披露内容与结合任何其他附图提供的披露内容相关并适用。
[0023]
图1是充气装置100的立体图。在展示的实施例中,充气装置100部分地包括注射器110。充气装置100包括三大组部件;每组可能具有许多子部件和零件。三大部件组是:比如注射器本体112等本体部件、比如柱塞120等加压部件、以及手柄130。
[0024]
注射器本体112可以由被配置为接纳柱塞120的总体上圆柱形的中空管形成。注射器本体112可以包括定位在注射器本体112的远侧端114附近的入口/出口端口115。在一些实施例中,螺母118可以在注射器本体112的近侧端113附近联接到注射器本体112。螺母118可以包括中心孔,该中心孔被配置为允许柱塞120穿过螺母118进入注射器本体112中。进一步地,在一些实施例中,螺母118可以包括螺母内螺纹119(图2),这些螺母内螺纹被配置为将螺母118选择性地联接到柱塞120。
[0025]
柱塞120可以被配置为可在注射器本体112内纵向移位。柱塞120可以包括柱塞轴121,该柱塞轴在柱塞轴121的远侧端处联接到柱塞密封件122。柱塞轴121还可以在柱塞轴121的近侧端处联接到手柄130,柱塞轴121跨越柱塞密封件122与手柄130之间的距离。
[0026]
手柄130广义上是指联接到柱塞120近侧端的一组部件,其中一些部件可以被配置为可由使用者抓握。在某些实施例中,手柄130可以被配置成使得使用者可以通过操纵手柄130来操纵柱塞120的位置。进一步地,在一些实施例中,手柄130可以是致动器机构,该致动
器机构被配置为操纵充气装置100的部件。在另外的实施例中,致动器机构可以包括操纵杆机构。
[0027]
结合本文的任何示例性手柄构型所披露的任何和每个部件都可以是可选的。也就是说,尽管手柄130广义上是指联接到柱塞轴121的近侧端的部件,这些部件可以被配置为可由使用者抓握,但是术语“手柄”的使用并不意味着表示每个所披露的手柄部件始终存在。而是,该术语在广义上使用,指代部件的集合,但不特别地指代或要求包括任何特定部件。同样,本文披露的其他广义的部件分组(比如注射器110或注射器本体112和柱塞120)也可以指代各个子部件的集合。这些术语的使用也应被视为非限制性的,因为每个子部件可能会或可能不会存在于每个实施例中。
[0028]
如图1所示,流体储器116可以由注射器本体112的内壁围成的、在柱塞密封件122与注射器本体112的远侧端114之间的空间限定。相应地,柱塞密封件122相对于注射器本体112的移动将改变储器116的大小和体积。推进柱塞120(朝远侧方向移位)可以减小注射器本体112内的体积和/或增加注射器本体内的压力。类似地,使柱塞120缩回可以增加注射器本体112内的体积和/或降低注射器本体内的压力。
[0029]
如图1和图2所示,在一些实施例中,注射器110可以包括螺母118,该螺母联接到注射器本体112的近侧端113。螺母118可以利用螺纹或其他联接机构将螺母118联接到注射器本体112。螺母118可以附加地包括螺母内螺纹119,这些螺母内螺纹被配置为将螺母118联接到柱塞120的一部分。柱塞120还可以包括柱塞外螺纹125,这些柱塞外螺纹被配置为将柱塞120联接到螺母118。因此,通过旋转柱塞120,柱塞120可以相对于注射器本体112纵向地平移,使得螺母螺纹119与柱塞螺纹125的相互作用引起柱塞120的纵向平移。因此,当柱塞螺纹125和螺母螺纹119接合时,柱塞120相对于注射器本体112的移动受到约束,但是柱塞120相对于注射器本体112不一定是固定的。例如,当螺纹125、119接合时,柱塞120可以是可旋转的,但不可直接平移。
[0030]
柱塞螺纹125可以被配置成使得这些柱塞螺纹可以缩回到柱塞轴121内。如图3和图4所示,在一些实施例中,柱塞螺纹125不围绕柱塞轴121的轴线延伸360度。此外,如图1至图4所示,柱塞螺纹125可以形成在螺纹导轨124上,该螺纹导轨可以设置在柱塞轴121中的凹槽123内。
[0031]
螺纹导轨124可以被配置成使得螺纹导轨124上的倾斜表面126与凹槽123内的倾斜表面127(图5)之间的相互作用相互作用使得柱塞螺纹125可以缩回到柱塞轴121内。螺纹导轨124上的倾斜表面126与凹槽123(图4)内的倾斜表面127之间的关系如图5、图8a和图8b所示。由于螺纹导轨124上的倾斜表面126与凹槽123中的倾斜表面127的相互作用,螺纹导轨124朝近侧方向的平移同时使螺纹导轨124朝向柱塞轴121的中心轴线缩回。类似地,螺纹导轨124朝近侧方向的平移使螺纹导轨124远离柱塞轴121的中心轴线移动。在展示的实施例中,作用在螺纹导轨124上的向远侧定向的偏置力可以将柱塞螺纹125偏置至非缩回位置。这样,施加到手柄130(特别是触发构件133)的单一向近侧定向的力可以将螺纹125、119解除联接。受益于本披露内容的本领域普通技术人员应了解,修改角度和界面使得螺纹导轨124上的向远侧定向的偏置力将柱塞螺纹125偏置在缩回位置也在本披露内容的范围内。如上所述,在美国专利号5,047,015、5,057,078、5,163,904和5,209,732中披露了类似机构。
[0032]
图8a和图8b展示了螺纹导轨124相对于螺母内螺纹119和柱塞轴121的两个位置。图8a示出了设置在非缩回位置的螺纹导轨124,使得柱塞螺纹125与螺母内螺纹119接合。图8b示出了充分缩回到柱塞轴121中的螺纹导轨124,使得柱塞螺纹125不与螺母内螺纹119接合。
[0033]
利用可缩回的螺纹的实施例可以允许使用者使柱塞轴121相对于注射器本体112移位的方式为通过柱塞轴121的旋转(以及螺纹的后续相互作用)、或者通过使柱塞螺纹125缩回并通过在柱塞轴121和注射器本体112上施加相反力来使柱塞轴121移位。(这些力进而可以使柱塞轴121相对于注射器本体112向远侧或向近侧移动。)在单次治疗过程期间,可以使用两种移位方法。
[0034]
图6是图1的充气装置的截面图,其中流体50设置在储器116内。图2和图6展示了处于第一构型和第二构型的图1的充气装置,在该第一构型下,手柄被释放且螺纹被接合(图2),在该第二构型下,手柄被致动且螺纹已脱离接合(图6)。如下所述,图7a至图8b中还示出了这些构型的附加细节。当比较这些构型时,可以注意到,在展示的实施例中,当手柄被致动并且螺纹已脱离接合时,触发构件133被侧向地移位(以及轴向地移位),如图6与图2相比所示。继续参考图6,在一些情况下,医生可能期望例如在充注充气装置时或者在充注附接的医疗装置(比如气囊)或对其进行放气时使柱塞轴121快速移位。柱塞轴121的快速移位可以通过使柱塞螺纹125缩回并使柱塞轴121相对于注射器本体112滑动来实现。例如,通过使柱塞螺纹125脱离接合并相对于注射器本体112朝近侧方向拉动柱塞轴121,医生可以快速地用流体50填充储器116。进一步地,医生可以通过使柱塞螺纹125缩回并推进柱塞轴121来快速地迫使流体50进入通向其他装置的管线,或者快速地从储器116中排出不需要的气泡。
[0035]
在其他情况下,医生可能期望对柱塞轴121的位置进行更精确的控制(例如,当使柱塞轴121移位以便调节储器116内的流体压力时),或者由于储器116内的高流体压力,在没有机械促推的情况下使柱塞轴121移位可能很困难或不可能。在这些情况下,医生可以选择通过旋转柱塞轴121来使柱塞轴121移位。
[0036]
返回参考图4,充气装置100(图1)的手柄130可以包括使得医生能够使柱塞120的螺纹导轨124缩回的部件。在一些实施例中,柱塞轴121可以固定到第一构件,比如手柄130的内部构件131。螺纹导轨124可以固定到手柄130的触发器133部件上。进一步地,偏置部件135可以被配置为相对于柱塞轴121朝远侧方向偏置触发器133。因为触发器133固定在螺纹导轨124上,触发器133上向远侧定向的力也会产生螺纹导轨124上向远侧定向的力。由偏置部件135提供的力(下文也称为偏置力)因此可以将螺纹导轨124偏置在如上所述的非缩回位置。相反地,克服偏置力并且使触发器133相对于柱塞轴121和内部构件131朝近侧方向平移可以使柱塞螺纹125缩回。在一些实施例中,偏置力135可以大于使柱塞130在注射器本体112内向近侧移位所需的力。
[0037]
在一些实施例中,手柄130可以进一步包括第二构件(比如外部罩套136)和一个或多个操纵杆140、141。操纵杆140、141可以被设置成使得这些操纵杆提供机械促推,使得使用者能够更容易地克服偏置力并使触发器133朝向内部构件131移位。
[0038]
具体参考图4、图6、图7a和图7b,手柄130与操纵杆140相互作用的部分可以是手柄130与操纵杆141相互作用的部分的镜像。因此,在一些实施例中,结合一个操纵杆提供的披露内容同样适用于另一个操纵杆。此外,在手柄的每一侧包括不相同的操纵杆、或包括单个
操纵杆也在本披露内容的范围内。
[0039]
图7a是处于图2所示构型的充气装置的手柄的一部分的详细视图。图7b是处于图6所示构型的充气装置的手柄的同一部分的详细视图。如图7a和图7b的详细视图所示,外部罩套136在点a处接触操纵杆140的第一操纵杆臂146。外部罩套136可以包括被配置为与第一操纵杆臂146接触的第一操纵杆接触表面139。因此,通过第一操纵杆接触表面139与第一操纵杆臂146的接触,手动施加到外部罩套136上的向远侧定向的力将在点a处对第一操纵杆臂146施加向远侧定向的力。操纵杆140可以经由枢转点b联接到柱塞轴121。设置在操纵杆140的第二操纵杆臂147上的横杆142因此可以在点c处对触发器133的顶部构件134上包括的第二操纵杆接触表面145施加向近侧定向的力。因此,向远侧作用在外部罩套136上的手动施加的力由操纵杆140、141传递并且使横杆142、143对触发器133施加近侧力。如上所讨论的,在展示的实施例中,触发器133上的近侧力使螺纹导轨124缩回,从而将柱塞120置于解除联接状态。
[0040]
改变操纵杆140、141的形状或形式也在本披露内容的范围内。例如,操纵杆140示出为具有靠近枢转点b的内半径,该内半径与形成在内部构件131的一部分上的外半径相配合。改变设计使得在操纵杆140上形成外半径并且在内部构件131上形成内半径也在本披露内容的范围内。第一操纵杆臂146和第二操纵杆臂147也可以朝一个或多个方向弯曲或倾斜。对操纵杆或任何其他部件的类似设计修改同样在本披露内容的范围内。在展示的实施例中,第一操纵杆臂146的长度大于第二操纵杆臂147的长度,这意味着从枢转点b到第一操纵杆臂146的端部的距离大于从枢转点b到第二操纵杆臂146的端部的距离。在其他实施例中,可以修改设计,使得第二操纵杆臂147的长度大于第一操纵杆臂146的长度。此外,操纵杆140、141可以被修改成使得枢转点b定位在每个操纵杆的一端处,而不是如展示的实施例中的定位在力传递接触点a、c之间的枢转点。此外,这些替代性设计的任何组合都在本披露内容的范围内,包括以下设计:两个操纵杆中的每个操纵杆具有不同的设计,手柄包括单个操纵杆,或者柔性机构用于传递力和/或提供机械促推。
[0041]
图7a展示了手柄130的操纵杆机构,其中柱塞(图2的120)处于联接状态,即当柱塞120经由螺纹125、119联接到注射器本体112时。如上所述,在展示的实施例中,此构型与手柄130被释放并且螺纹125、119被接合的构型相关。在图7a的构型下,没有外力约束或压缩触发器133或外部罩套136。(如下所讨论的,图7a包括标记,该标记示出了可以在何处施加力来致动手柄以使元件移位成图6、图7b和图8b的构型。)
[0042]
图7a还指示了点a与点b之间的横向距离(垂直于柱塞120的纵向轴线),该横向距离限定了第一力矩臂长度152。还示出了点c与点b之间的横向距离,该横向距离限定了第二力矩臂长度151。如在图中可以看到的,这些力矩臂与第一操纵杆臂146和第二操纵杆臂147相关联。在展示的实施例中,第一力矩臂长度152比第二力矩臂长度151长。在其他实施例中,第一力矩臂长度152可以等于或短于第二力矩臂长度151。在展示的实施例中,外部罩套136相对于柱塞轴121的远侧移位距离因此被操纵杆140转换成触发器133相对于柱塞轴121的更短的近侧移位距离,从而产生机械促推(由于第一力矩长度152与第二力矩臂长度151之间的差异)。因此,机械促推可以理解为将朝远侧方向施加到外部罩套136的力x转换成经由触发器133作用在螺纹导轨(图5的124)上的向近侧施加的力。换句话说,力x的施加可以产生作用在点c上的力,该力倾向于以与直接施加到触发器133上的力相同的方式使触发器
133移位,比如展示为力y的力。(如下所讨论的,在某些用途中,力x和y也可以由外部元件(例如,医生手的部分)同时施加,但是由于力x的施加而被施加在点c处的力将补充力y)。螺纹导轨124上的力(无论是由于单独的力x的输入而在点c处施加的力,还是由于力x和y的组合而施加的力)因此可以被引导以对抗和克服由偏置构件135施加的力、压缩偏置构件135、并使螺纹导轨124移位。因此,当单个力朝远侧方向从外部被施加到手柄130上时,操纵杆140在将柱塞120与注射器本体112解除联接方面提供了机械促推。
[0043]
此外,施加远侧力x会产生反作用力z(假设充气装置100被约束成使得力x不会简单地使整个充气装置100移位)。在一些情况下,当螺纹导轨124接合时,与手动施加到外部罩套136上的远侧力相反的手动施加到注射器本体112上的近侧力可以被传递到柱塞轴121,并且产生至少一部分反作用力z。当力x足以压缩偏置构件135并且使螺纹导轨124移位时,反作用力z将不再具有由螺纹导轨124与注射器本体112的接合提供的分量。此时,反作用力z可能仅由柱塞密封件122与注射器本体112之间的摩擦力产生(假设在注射器本体112的储器中没有压力)。相应地,当力x也足以克服力z(由这种摩擦提供)时,柱塞122可以由于力x的施加而在注射器本体112内被推进。然而,当力z仅由这种摩擦提供时,力z可能不足以压缩偏置构件135,从而使得偏置构件135膨胀、螺纹导轨124朝远侧方向移位、并且因此螺纹导轨124与注射器本体112重新接合。这种重新接合再次允许注射器本体112上的力被传递到柱塞轴121,使得力z再次具有由施加在注射器本体112上的力提供的分量。这进而可能会增加力z,再次压缩偏置构件135,并引起螺纹导轨124移位和缩回。因此,柱塞120响应于施加到手柄130的向远侧定向的力(不存在从外部施加到触发器133的近侧力)的推进可能导致在柱塞120被推进时螺纹导轨124的重复脱离接合和重新接合,从而在螺纹重复地接合/脱离接合时引起不连续模式的接合/脱离接合和“粗糙”感觉或声音。如下面进一步详细描述的,在一些实施例中,操纵杆机构可以被配置为当向远侧定向的力被手动施加到手柄130上而没有近侧力被手动施加到触发器133上时在柱塞120的推进期间抑制螺纹导轨124的重新接合。
[0044]
在一些实施例中,机械促推可以被配置成(由于操纵杆140的大小、外部罩套136和触发器133的相对位移、偏置构件135的刚度以及第一力矩臂长度152与第二力矩臂长度151的比率)使得外部罩套136上用于将柱塞120解除联接的向远侧定向的力x小于柱塞密封件122与注射器本体112之间的摩擦力。换句话说,充气装置100可以被配置成使得将柱塞120与注射器本体112解除联接所需的施加在外部罩套136上的向远侧定向的力x的量值小于在柱塞120与注射器本体112解除联接后推进柱塞120所需的力。在这样的实施例中,推进柱塞120的摩擦阻力因此足以保持偏置构件135被压缩,使得当柱塞120由于力x的施加而被推进时螺纹不会不连续地接合/脱离接合。这样的实施例可以被配置成使得力x的施加允许柱塞120平滑和/或连续推进,而无需在触发器133上施加外力(比如力y)。在此构型下,手柄机构因此可以提供第一量值的机械促推或提供机械促推的第一因子。如下面详细描述的,在手柄致动期间,机械促推的量值可能会发生变化。
[0045]
图7b展示了手柄130的操纵杆机构,其中柱塞120处于解除联接状态,即,当柱塞120由于手柄的致动和螺纹导轨124的缩回而与注射器本体112解除联接时。在此构型下,外部罩套136相对于图7a所示的位置向远侧移位,并且触发器133相对于图7a所示的位置向近侧移位。如上所述,触发器133的移位可能是由于外部施加力x(以及这种力在点c处的传
递)、外部施加力y或其组合。在展示的构型下,操纵杆臂147的点c沿横向方向朝向枢转点b移位。这样,图7b中的第二力矩臂长度151
′
比图7a中的第二力矩臂长度151短,从而产生大于结合图7a所讨论的第一量值的机械促推的第二量值。换句话说,图7b所示构型下的机械促推的量值(机械促推的第二因子,或由图7b的构型产生的机械促推)可以大于图7a所示构型下的机械促推的量值(机械促推的第一因子,或由图7a的构型产生的机械促推)。这样,当柱塞120处于联接状态时在外部罩套136上克服与反作用力z相反的偏置力所需的向远侧定向的力x的量大于当柱塞120处于解除联接状态时的量。因此,操纵杆机构提供了施加到外部罩套136上的所需的较低量的向远侧定向的力x,以在柱塞120与注射器本体112解除联接之后将柱塞120保持在解除联接状态。换句话说,在外部罩套136的第一位置处使外部罩套136相对于柱塞轴121向远侧移位所需的从外部施加在外部罩套136上的远侧力x的量可以大于在外部罩套136的第二位置处使外部罩套136相对于柱塞轴121向远侧移位所需的手动施加在外部罩套136上的远侧力x的量,其中,外部罩套136的第二位置在第一位置的远侧。在一些实施例中,机械促推的第二因子(结合偏置力)可以提供当柱塞120在注射器本体112内移位时保持柱塞120解除联接所需的较低量的向远侧定向的力x(施加到外部罩套136)。由于在这种情况下,力x的量小于柱塞密封件122与注射器本体112之间的摩擦力,所以当向远侧定向的力从外部施加到外部罩套136时,柱塞可以以连续的方式(没有螺纹的接合/脱离接合)被推进。同样,这可以表述为,根据机械促推的第二因子,保持柱塞120与注射器本体112解除联接所需的、罩套136上的向远侧定向的手动力x可以小于使柱塞120在注射器本体112内向远侧移位以将柱塞120与注射器本体112解除联接所需的、罩套136上的向远侧定向的手动力x。
[0046]
在一些实施例中,柱塞密封件122与注射器本体112之间的摩擦力可以至少部分地限定柱塞轴121上的反作用力z。在一些实施例中,摩擦力可以基本上限定柱塞轴121上的全部反作用力z。进一步地,当柱塞120相对于注射器本体112静止时的摩擦力可以不同于当柱塞120移动时的摩擦力。换句话说,柱塞密封件122与注射器本体112之间的静态摩擦力可以不同于动态摩擦力。在一些情况下,动态摩擦力可能小于静态摩擦力。在一些实施例中,机械促推的第一因子可以提供朝远侧方向从外部施加到手柄的单个所需的力x(将柱塞120解除联接所需的力)小于动态摩擦力。在其他实施例中,机械促推的第一因子可以提供从外部施加到手柄的单个所需的力x小于静态摩擦力且大于动态摩擦力。类似地,机械促推的第二因子可以提供单个所需的力x小于动态摩擦力。在一些实施例中,注射器本体112内的压力也可以至少部分地限定柱塞轴121上的反作用力z。
[0047]
受益于本披露内容的本领域普通技术人员应了解,在许多情况下,在远侧力被手动施加到外部罩套136的同时,近侧力可以被手动施加到触发器133。例如,当使用者握住手柄130时,使用者可以通过用他或她的手指挤压触发器133来致动手柄130。此动作可以与由使用者手的手掌施加在外部罩套136上的向远侧定向的力一致。相应地,以这种方式施加的力可以理解为触发器133上的近侧力和外部罩套136上的远侧力。操纵杆140、141的机构将施加在外部罩套136上的向远侧定向的力结合手动施加在触发器133上的近侧力转换成触发器133上的组合近侧力,以克服偏置力并使螺纹导轨124缩回。在这样的情况下,手动施加在外部罩套136上的远侧力和手动施加在触发器133上的近侧力的组合也可以在将柱塞120与注射器本体112解除联接方面提供机械促推。
[0048]
在展示的实施例中,朝远侧方向施加到手柄130的超过第一指定量的单个力可以将柱塞120与注射器本体112解除联接。朝远侧方向施加到手柄130的超过第二指定量的单个力可以保持柱塞120与注射器本体112的解除联接。朝远侧方向施加到手柄130的超过第三指定量的单个力可以克服柱塞密封件122与注射器本体112之间的静态摩擦并启动柱塞120的推进。朝远侧方向施加到手柄130的超过第四指定量的单个力可以克服柱塞密封件122与注射器本体112之间的动态摩擦并保持柱塞120的推进。第一指定量可以大于第二指定量且小于第三指定量和/或第四指定量。第二指定量可以小于第三指定量和/或第四指定量。
[0049]
在一些实施例中,摩擦力可以进一步抑制螺纹导轨124的重新接合。例如,第一操纵杆接触表面139与第一操纵杆臂146之间在点a处的摩擦力和/或横杆142与第二操纵杆接触表面145之间在点c处的摩擦力可以提供防止外部罩套136远离如图7b所示位置向近侧移位所需的力x小于、并且在一些情况下显著小于使罩套向远侧移位到如图7b所示位置所需的力x。这样,当向远侧定向的力被手动施加到手柄130上而没有近侧力被手动施加到触发器133上时,在柱塞120的推进期间,第一操纵杆接触表面139与第一操纵杆臂146之间在点a处的摩擦力和/或横杆142与第二操纵杆接触表面145之间在点c处的摩擦力可以进一步抑制螺纹导轨124的重新接合。
[0050]
在展示的实施例中,朝远侧方向施加到外部罩套136的单个力可以经由操纵杆机构和偏置部件135间接地传递到柱塞轴121。在一些情况下,朝远侧方向施加到外部罩套136的单个力可以使外部罩套136相对于柱塞轴121向远侧移位,使得外部罩套136在柱塞轴121上触底,并且单个力被刚性地传递到柱塞轴121。
[0051]
对于需要大型注射器或高压的某些治疗,可能期望被配置为在使螺纹导轨缩回时提供机械促推的手柄。由于装置的大小或装置内的压力,这样的治疗可能还需要更大的偏置力。提供机械促推的手柄可以使被配置用于这样的治疗的装置更易于使用。
[0052]
如上所述,并且如图所展示,在一些实施例中,操纵杆140、141可以不被销别住或者以其他方式机械地联接到任何其他零件。在一些实施例中,操纵杆140、141可能仅由于与装置的其他部件接触而受到约束。同样,外部罩套136可以不机械地紧固到任何其他部件上,而是像操纵杆140、141一样,外部罩套136的部分与其他部件之间的接触可以用来固定外部罩套136相对于其他部件的位置。因此,在一些实施例中,操纵杆140、141和外部罩套136可以被允许相对于其他零件“浮动”。如上所述的浮动组件可以允许某些部件相对于其他零件有多个自由度。例如,如下所解释的,在一些实施例中,当触发器133被致动时,触发器133可以沿纵向方向和横向方向两个方向(相对于外部罩套136)移位。
[0053]
如图3和图4所示,外部罩套136还可以包括槽137,这些槽被配置为与形成在内部构件131的外表面上的脊132相配合。这些槽137与脊132之间的相互作用限制了外部罩套136相对于内部构件131的移动;也就是说,两个部件仅可以在与注射器本体112的纵向轴线平行的单个方向上(相对于彼此)行进。如上所述,在展示的实施例中,由于螺纹导轨124和柱塞轴121的倾斜表面126、127的相互作用,当触发器133被压缩时,该触发器在横向于注射器本体112的纵向轴线的方向上行进(作为沿着纵向轴线行进的补充)。脊和槽(比如展示的实施例的脊和槽(132,137))可以为装置提供一定程度的可用性和舒适性,因为外部罩套136的在一些情况下可能与使用者的手掌接触的部分不会沿横向方向滑动。
[0054]
许多与外部罩套136相关的设计修改都在本披露内容的范围内。例如,在展示的实施例中,外部罩套136具有帽状形状,装配在内部构件131上。在其他实施例中,外部罩套136可以改为设计为按钮,当该按钮被压缩时该按钮滑入内部构件131中。同样地,可以利用任何其他可纵向致动部件来代替外部罩套136。
[0055]
上文所述以及图1至图9各图所示的手柄机构也可以用于改变使柱塞螺纹125缩回所需的输入力的位置和方向。该机构可以允许使用者仅通过向外部罩套136的顶表面138施加向远侧定向的力来将触发器133拉向内部构件131(并且因此使柱塞螺纹125缩回)。如上所述,操纵杆140、141将这种力传递到触发器133,从而使柱塞螺纹125缩回。
[0056]
在一些情况下,比如医生等使用者可能期望仅用一只手使柱塞120朝远侧方向移位。这可以通过握住注射器本体112并使用表面(例如桌面)向外部罩套136的顶表面138施加向远侧定向的力来实现。以这种方式,比如上述机构等机构可以使得医生能够单手使柱塞移位。
[0057]
图9是图1的充气装置100的立体图,其中流体50设置在该装置内并且气囊105经由输送管线104联接到充气装置100。现在参考图9以及其他附图中所示的部件,在一些情况下,可能期望如上所述“单手”操作注射器110,以便充注该系统。例如,医生可以将充气装置100与包括气囊105的治疗(比如血管成形术)结合使用。医生可以通过将柱塞120朝近侧方向拉回而开始用流体50(比如造影剂流体)填充注射器本体112。在一些情况下,医生将通过用第一只手握住充气装置100的手柄130、同时用第二只手握住注射器本体112来完成这。医生然后可以通过用他或她的第一只手一起挤压触发器133和外部罩套136来使柱塞螺纹125缩回,然后将柱塞120朝近侧方向拉回。
[0058]
在将所期望量的流体50置于注射器本体112内之后,医生可以将注射器本体112定向成使得注射器本体112的远侧端114位于手柄130上方,因此流体50中的任何气泡将倾向于上升至注射器本体112的远侧端114。医生也可以摇动、敲击或以其他方式扰动注射器110,以便于流体50中任何气泡的移动。医生然后可以通过使柱塞120相对于注射器本体112朝远侧方向移位从而迫使气泡从注射器本体112中排出来充注注射器110。
[0059]
在一些情况下,在首先使柱塞螺纹125缩回之后,医生将如所描述地使柱塞120移位。这可以以本文披露的任何方式完成,包括上述单手操作。也就是说,医生可以简单地通过用一只手握住注射器本体112并使用静态物体或表面(比如桌面)向外部罩套136的顶表面138施加向远侧定向的力来充注充气装置100。外部罩套136上的力将(1)经由手柄130机构使柱塞螺纹125缩回,以及(2)使柱塞120相对于注射器本体112朝远侧方向移位。这种取向将注射器本体112定位在潜在的期望位置,以允许空气行进到注射器本体112的远侧端114,同时将手柄130定向成使得外部罩套136的顶表面138直接面向比如桌子等水平表面。因此,在一些情况下,由于注射器110的取向以及用一只手进行充注的能力,医生可能期望以这种方式充注注射器110。
[0060]
在治疗期间可能有其他情况,其中医生期望仅用一只手使柱塞120向远侧移位。除了如上所述充注充气装置100之外,此推进柱塞120的方法也可以用于充注连接到注射器110的装置,比如气囊105。
[0061]
无需进一步阐述,相信本领域技术人员可以使用前面的描述来最大程度地利用本披露内容。本文所披露的示例和实施例应解释为仅为说明性和示例性的,而不是以任何方
式限制本披露内容的范围。对于本领域技术人员来说,显而易见的是,可以在不脱离本披露内容的基本原理的情况下对上述实施例的细节作出改变。本发明的范围意图由所附权利要求及其等效物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。