1.本发明涉及医疗器械技术领域,尤其涉及医用导管及医疗装置。
背景技术:
2.胆道镜(cholangioscopy)及胆道镜技术在临床上广泛应用,已经成为肝内外胆道疾病以及特殊情况最重要的诊断工具及治疗方法之一,其也成为胆道外科既肝脏外科最为重要的微创技术手段之一。通常,胆道镜技术按进镜路径可分为经人工通道及经自然腔道两类,前一类经人工通道进镜路径可以包括t管窦道、经皮经肝和术中胆道镜等,后一类自然腔道进镜路径主要是指经口胆道镜技术。
3.胆道子母镜是最为经典的经口胆道镜技术,该技术是先用母镜(十二指肠镜)行十二指肠乳头切开术,然后将子镜(直径约为3.5mm的经口胆道镜)从母镜的器械通道插入胆总管后,可以进行肝外胆管的检查、组织活检及取石治疗。此技术的优点是循自然通道进镜,无需开刀手术,创伤最小等优点。
4.上述胆道子母镜可以实现直视下胆胰管的检查与治疗,是遵循自然通道能够完成的重要微创手术,造福了大量患者。但其因为需要通过两套镜子(子镜和母镜)间的互相配合,其结合技术原理而言带来以下问题:
5.子镜器械通道过小:目前子镜内部器械通道的内径仅为1.2mm,其仅能适配专用活检钳,由于所述活检钳咬合力弱且取样量少,致使一处病灶活检常需要进行数次到十数次取样,既影响诊断准确性,又严重延长手术时间。
6.稳定性不足:母镜的远端悬挂于乳头附近,由于胆总管轴向与十二指肠降部段相交处呈锐角,子镜到达十二指肠降部必须成j型反转后才能对准十二指肠乳头,而母镜远端不具备支撑,受肠道蠕动等影响使得母镜的远端位置易发生移动,连带母镜器械通道内部的子镜镜身的头端也会发生移位,且子镜也会因为不具有支撑而无法继续向胆总管方向前进,影响手术操作。
7.照明不足,子镜头端用于光源排布的空间有限,紧靠子镜的光源无法照亮较大空间的胃部,使得独立使用子镜进入胃部寻找幽门等操作较困难。
技术实现要素:
8.针对上述现有技术的缺点,本发明的目的是提供医用导管及医疗装置,以解决现有技术中的一个或多个问题。
9.为实现上述目的,本发明的技术方案如下:
10.医用导管,包括第一主体段、第一弯曲段及第一头段,所述第一主体段的远端与第一弯曲段的近端连接,所述第一弯曲段的远端与第一头段的近端连接,所述第一主体段具有至少一第一通路,所述第一通路用于配置医疗器械穿入穿出。
11.进一步的,所述医用导管还包括至少一第二通路及至少一第三通路,所述第二通路用于流通介质或通入电路,所述第三通路用于配置牵引线。
12.进一步的,所述第一主体段的所述第一通路与所述第二通路互相分离,且所述第一通路设置于所述第二通路的内部。
13.进一步的,所述第二通路使所述第一主体段具有开口,所述开口沿所述第一主体段的外侧开设。
14.进一步的,所述开口沿所述第一主体段的轴向开设。
15.进一步的,所述开口沿径向向所述第一主体段的中心凹陷。
16.进一步的,所述第一主体段的外侧覆盖至少一外层结构。
17.进一步的,所述第一通路与所述第二通路同轴设置。
18.进一步的,所述第一通路与所述第二通路非同轴设置。
19.进一步的,在所述第一主体段外径不变时,所述第一通路的内径扩大至不大于1.2-2.8mm。
20.医疗装置,包括如权利要求1~10任一项所述医用导管及与所述医用导管配套使用的外管和手柄,所述外管的近端设置于所述手柄内,所述外管的远端伸出所述手柄,所述医用导管的近端与所述手柄活动连接,所述医用导管的远端伸入所述手柄并贯穿所述外管。
21.与现有技术相比,本发明的有益技术效果如下
22.在不更改内管外径尺寸的情况下,将第一通路的内径扩大至不大于1.8mm,所述第一通路截面积增大1倍,使得外径为1.5mm的活检钳可以在该第一通路中使用,从而增加活检钳的咬合力并实现取样量的大幅提升,取样次数减少,并扩大了器械的使用范围。
23.进一步的,作为安装电路和介质的第二通路均具有独立使用的腔体,使介质通入的流量更大,且各通路之间互相不受影响。
24.进一步的,稳定性增强,通过在第二主体段的远端设置支撑部,利用通路对所述支撑部内部的积存腔充入介质,使所述支撑部膨胀并带动整段外管移动并贴紧肠壁,利用支撑部撑开肠道空间使得内管至乳头的距离增加,为内管的操作提供了空间和稳定性。
25.进一步的,外管头段设置光源,利用外管光源并配合内管光源使胃部大空间被照亮,在不增加内管外径的情况下,克服了胃部空间光照不足的问题。
26.进一步的,操作难度降低,手柄由原来的两个手柄减少为仅采用一个手柄,使用者可以单人操作,通过在手柄主体中增加外管控弯机构,利用抬钳器把手带动抬钳器转盘,所述抬钳器转盘被赋予转动副并通过抬钳器拉杆将所述转动副转变为所述抬钳器滑块在抬钳器滑板的滑动槽内往复移动的移动副,所述抬钳器滑块在移动过程中通过外管拉线带动外管的近端弯曲,从而使所述外管近端在弯曲时提供挡板效果,由此改变与所述外管配合的内管的前进方向,进镜到十二指肠过程中由原来的直视方向更改为侧视方向,使所述内管可以对准位于十二指肠降部侧壁上的乳头并继续向胆总管的方向进入。
27.进一步的,在手柄内部设置内管控弯机构,内管控弯机构具有两套控制部件,每套控制部件分别控制两根拉线,以实现内管的第一弯曲段可在两个方向进行弯曲,进而利用两套控制部件实现内管近端在四个方向的弯曲,使内管可以通过不同的弯曲段实现从食管进入胃部,再通过幽门进入十二指肠。
28.进一步的,内管控弯曲机构中为了避免下轮盘弹簧片与壳体或其他零件产生摩擦,内管控弯机构中还设置有下轮盘弹簧片定位板,各下轮盘弹簧片定位板之间形成下轮
盘弹簧片滑动槽,使弹簧片可以沿所述滑动槽滑动。同时内管控弯机构中还设置轮盘挡板将上轮盘弹簧片定位板覆盖,避免上轮盘拉线与其他零部件接触造成不必要的摩擦。
29.进一步的,在手柄内设置外管控弯锁紧机构,外管控弯自锁机构利用弹簧销被按压时向下运动,使所述弹簧销的销头向所述限位杆施压,使所述限位杆沿所述限位卡扣转动并接触抬钳器转盘,从而限制抬钳器转盘的转动,以实现所述外管在任意一个弯曲度的自锁。
30.进一步的,手柄内部还设置内管控弯锁紧机构,利用内管控弯自锁机构可以实现内管相对于外管在上、下、左、右任意一个方向的锁定。该内管控弯锁紧机构具有两种结构分别设置在手柄主体的外部或内部,其中一种结构是利用旋转部分使压杆部分的锁紧片以轴为中心作相对旋转运动,从而使相邻锁紧片的远端相对的闭合并分别抱紧上轮盘和下轮盘,从而实现内管在任意方向的自锁。另一种结构是旋转锁紧旋钮带动转动限位块旋转,转动限位块沿面转动后使所述固定限位块受到在轴向上的挤压力从而实现轴向移动,由于固定限位块的背面设置第一锁紧垫片,第一锁紧垫片受挤压并沿轴向对所述下轮盘旋施压,所述下轮盘旋钮受挤压力移动,在移动过程中所述第一锁紧垫片内径逐渐缩小并抱紧下轮盘的轴端,使其无法转动。同时下轮盘旋钮被挤压后在下轮盘的轴端沿轴向移动并接触上轮盘旋钮,使上轮盘旋钮处的第二锁紧垫片的内径沿径向收缩并抱紧上轮盘的轴端,从而锁紧上轮盘,由此实现上轮盘和下轮盘的锁定。
31.进一步的,手柄中还设置内管锁紧机构,内管锁紧机构采用夹紧部通过第一旋转部旋转后并利用夹紧部向内管施压,也可以采用旋转式结构或套管式结构对内管进行锁定,从而使内管相对于外管的位置固定,以实现内管的夹紧和放松。
32.进一步的,无交叉感染风险,本发明产品可以作为一次性产品,外管的制造成本大大低于传统结构,且整个装置的成本低,仅需配套使用一套成像系统,一台内窥镜图像处理器即可。
附图说明
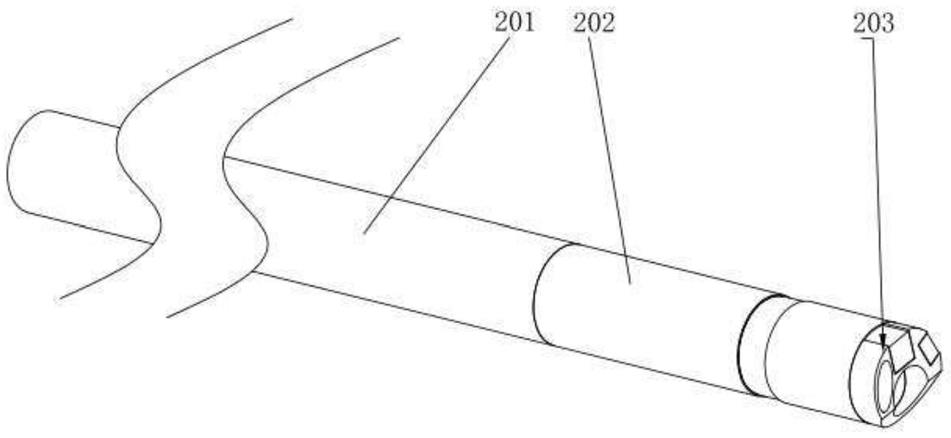
33.图1示出了本发明实施例医用导管及医疗装置中医用导管的主视图。
34.图2示出了本发明实施例医用导管及医疗装置中医用导管第一头段的结构示意图。
35.图3示出了本发明实施例医用导管及医疗装置中医用导管第一头段的局部结构示意图。
36.图4示出了本发明实施例医用导管及医疗装置医用导管中第一主体段的截面图。
37.图5示出了本发明另一种实施例医用导管及医疗装置医用导管中第一主体段的截面图。
38.图6示出了本发明实施例医用导管及医疗装置中外管设置支撑部的结构示意图。
39.图7示出了本发明实施例医用导管及医疗装置中第二主体段与支撑部连接的截面示意图。
40.图8示出了本发明实施例医用导管及医疗装置中外管头段结构的正视图。
41.图9示出了本发明实施例医用导管及医疗装置中医疗装置的结构示意图。
42.图10示出了本发明实施例医用导管及医疗装置中手柄外部的结构示意图。
43.图11示出了本发明实施例医用导管及医疗装置中外管控弯机构的结构示意图。
44.图12示出了本发明实施例医用导管及医疗装置中内管控弯机构的局部结构示意图ⅰ。
45.图13示出了本发明实施例医用导管及医疗装置中内管控弯机构的局部结构示意图ⅱ。
46.图14示出了本发明实施例医用导管及医疗装置中内管控弯机构的局部结构示意图ⅲ。
47.图15示出了本发明实施例医用导管及医疗装置中内管控弯机构在第一种实施例的结构示意图ⅰ。
48.图16示出了本发明实施例医用导管及医疗装置中内管控弯机构在第一种实施例的结构示意图ⅱ。
49.图17示出了本发明实施例医用导管及医疗装置中内管控弯机构在第二种实施例的结构示意图。
50.图18示出了本发明实施例医用导管及医疗装置中内管锁紧机构在第一种实施例的结构示意图。
51.图19示出了本发明实施例医用导管及医疗装置中内管锁紧机构在第二种实施例的结构示意图ⅰ。
52.图20示出了本发明实施例医用导管及医疗装置中内管锁紧机构在第二种实施例的结构示意图ⅱ。
53.图21示出了本发明实施例医用导管及医疗装置中内管锁紧机构在第二种实施例的结构示意图ⅲ。
54.图22示出了本发明实施例医用导管及医疗装置中内管锁紧机构在第三种实施例的结构示意图。
55.图23示出了本发明实施例医用导管及医疗装置中内管锁紧机构在第四种实施例的结构示意图
56.图24示出了本发明实施例医疗装置中外管经口插入体内的示意图。
57.图25示出了本发明实施例医疗装置中外管在胃部寻找幽门的示意图。
58.图26示出了本发明实施例医疗装置中外管在胃部穿过幽门的示意图。
59.图27示出了本发明实施例医疗装置中外管进入十二指肠的示意图。
60.图28示出了本发明实施例医疗装置中支撑部撑开肠道内部空间的示意图。
61.图29示出了本发明实施例医疗装置中外管弯曲段弯曲寻找乳头并插入导丝的示意图。
62.图30示出了本发明实施例医疗装置中内管头端插入乳头的示意图。
63.图31示出了本发明实施例医疗装置中活检钳经内管器械通道伸出的示意图。
64.附图中标记:附图中标记:1、手柄主体;
65.101、内管锁紧机构;10100、锁紧螺母;101001、内螺纹孔;10101、内管锁紧垫片;101010、第一夹紧孔;10102、锁紧座;101020、外螺纹;10103、第一限位卡扣;10104、夹紧座;10105、转动盘;101051、把手安装口;101052、第一滑动槽;101053、转动盘贯通口;10106、防转卡扣槽;10107、旋转把手;10108、固定盘;101081、第二滑动槽;101082、固定盘贯通口;
10109、夹紧片;101091、第一凸起;101092、第二凸起;101093、第二夹紧孔;10110、夹紧端;10111、铰链;10112、固定端;10113、夹紧把手;10114、夹紧口;10115、套管;10116、管套;10117、第一齿;10118、第二齿。
66.102、外管控弯自锁机构;10201、弹簧销;10202、限位杆;102021、卡齿;10203、第二限位卡扣;
67.103、左壳体;104、右壳体;105、抬钳器把手;106、抬钳器转盘;1061、齿槽;107、上轮盘旋钮;108、下轮盘旋钮;109、锁紧旋钮;110、三通件;111、球囊阀;112、抬钳器拉杆卡扣;113、抬钳器拉杆;114、滑块卡扣;115、抬钳器滑块;116、抬钳器滑板;1161、卡扣滑动槽;1162、拉线孔;117、内管通道;118、下轮盘挡边;119、下轮盘;1191、固定轴安装孔;120、固定轴;121、下轮盘弹簧片;122、下轮盘弹簧片定位板;123、下轮盘弹簧片滑动槽;124、下轮盘拉线;125、下轮盘拉线卡扣;126、上轮盘挡边;127、上轮盘;128、上轮盘弹簧片;129、上轮盘弹簧片定位板;130、上轮盘弹簧片滑动槽;131、上轮盘拉线;132、上轮盘拉线卡扣;133、轮盘挡板;134、内管连接件;135、外管过渡连接件;136、拉线盖板;137、注水注气管;138、抽吸口;139、防松螺母;140、转动限位块;1401、凸部;141、固定限位块;1411、面;1421、第一锁紧垫片;1422、第二锁紧垫片;143、通道孔;144、压杆;145、锁紧把手;146、轴座;1461、轴;147、锁紧片;148、弹簧;
68.2、医用导管;201、第一主体段;2011、第一通路;20111、第一孔;2012、第一开口;2013、第二开口;2014、第一管;20141、第一腔;202、第一弯曲段;203、第一头段;2031、第二孔;2032、第一安装口;2033、第三孔;2034、第二安装口;2035、摄像组件;2036、第一光源;204、第二管;2041、第二腔;205、第二通路;2051、第三管;2052、第三腔;2053、第四管;2054、第四腔;2055、第四孔;2056、第五管;20561、第五腔;206、第三通路;2061、第六管;2062、第六腔;2063、第五孔;207、第一外层;208、第二外层;
69.3、外管;301、外管拉线;302、第二主体段;3021、通路;3022、管腔;3023、第二中心;303、支撑部;3031、第一中心;3032、积存腔;304、第二弯曲段;305、第二头段;3051、第二拉线孔;3052、第二光源;3053、内管安装孔;3054、开口;306、第三拉线孔。
具体实施方式
70.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和具体实施方式对本发明提出的医用导管及医疗装置作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需要说明的是,附图采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施方式的目的。为了使本发明的目的、特征和优点能够更加明显易懂,请参阅附图。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
71.为了更加清楚地描述上述医用导管及医疗装置的结构,本发明限定术语“远端”和“近端”,上述术语为医疗器械领域的专用术语,具体而言,“近端”表示手术过程中靠近操作者的一端,“远端”表示手术过程中远离操作者进入人体的一端,以图1为例,图1的左侧为近
端,图1的右侧为远端。
72.下面描述医用导管2的具体结构如下:
73.请参考图1至图4,所述医用导管2包括第一主体段201、第一弯曲段202及第一头段203,第一主体段201的远端与第一弯曲段202的近端连接,第一弯曲段202的远端与第一头段203的近端连接。
74.具体的,上述第一主体段201采用柔性主体管,第一弯曲段202采用多腔管,所述多腔管的柔软度相比于柔性主体管更软,且所述多腔管的断面与所述柔性主体管相同。在本发明的其余实施例中,所述第一弯曲段202也可以采用多个弯曲节互相连接的弯曲节,所述多腔管或所述弯曲节的结构采用现有技术。
75.第一主体段201具有:
76.第一通路2011,用于配置医疗器械;以用于供医疗器械通入并可沿第一通路2011移动,本发明实施例中所述医疗器械采用活检钳。
77.至少一第二通路205,第二通路205用于配置介质和通入电路,所述介质具体为液体介质或气体介质。
78.至少一第三通路206,所述第三通路206用于配置拉线。
79.下面描述医用导管2的第一主体段201在第一实施例的具体结构:
80.请参考图2至图4,在医用导管2外径(即第一主体段201、第一弯曲段202及第一头段203)不变时,所述第一通路2011的内径扩大至1.2mm~2.8mm,具体的,所述第一通路2011为在所述第一主体段201上沿轴向贯通的第一孔20111,所述第一孔20111为圆形孔,优选的,所述第一孔20111的孔径为1.8mm,在本发明的其他实施例中所述第一孔20111可为除圆形孔之外的任意形状。
81.进一步的,请参考图2,在本发明的另一可选实施例中,所述第一通路2011为贯穿设置于第一主体段201上的第一管2014,其中所述第一管2014嵌入所述第一孔20111内,所述第一管2014的内部形成第一腔20141,在该实施例中第一孔20111用于安装第一管2014,所述第一腔20141的腔内径用于通入器械且供器械活动,当采用第一管2014时,所述第一腔20141的腔体内径在医用导管2的外径不变时扩大至不大于1.8mm。
82.下面描述第二通路205的具体结构如下:
83.请参考图3和图4,第二通路205使第一主体段201上具有一开放式结构,该开放式结构具有沿第一主体段201外侧开设的开口,开口沿径向向第一主体段201的中心凹陷。具体的,本发明实施例中开口为两个,分别为第一开口2012和第二开口2013。
84.其中在第一主体段201的外侧包覆至少一外层结构,本发明实施例中所述外层结构为第一外层207和第二外层208,其中第一外层207具体为编织层,所述第二外层208具体为表皮层。第一外层207覆盖于第一主体段201的外侧,第二外层208覆盖于第一外层207。当所述第一主体段201的外侧被第一外层207覆盖时,部分第一外层207的内侧将第一开口2012和第二开口2013闭合形成封闭区域。
85.请继续参考图3,在本发明的另一可选实施例中,所述第二通路205也可以是设置在第一开口2012的第三管2051及设置在第二开口2013的第四管2053,所述第四管2053具有第四腔2054用于介质流通,所述第三管2051具有第三腔2052用于设置电路。
86.所述第三管2051具有与所述开口的凹陷部分相贴合且形状相适配的一侧。具体
的,所述第三管2051和第四管2053优选采用椭圆形设计,使所述第三管2051内部的第三腔2052、第四管2053中的第四腔2054也形成椭圆形腔,从而使得当所述第二通路205用于通入气体或液体时气体量和液体流量更大。在本发明的其余实施例中,所述第三管2051和第四管2053也可以采用除椭圆形之外的任意形状,只要满足可供介质流通及用于安装电路即可。
87.上述第一通路2011和第二通路205互相独立设置,使得通入电路、液体或气体的第二通路205不在占有第一主体段201开设第一通路2011的空间,从而使第一通路2011即第一孔20111的孔内径或第一管2014的管内径可最大化设置,在不改变第一主体段201外径的情况下,所述第一孔20111的孔内径或第一管2014的管内径在医用导管2外径不变的情况下可以扩大至1.8mm(原传统结构中该通道仅为1.2mm),面积增加近一倍,从而使得常规1.5mm的外径活检钳可以灵活进入使用,且大幅度提升取样量,减少取样次数。且扩大了器械的使用范围、例如支架、取石网篮等。
88.进一步的,请参考图4,所述第三通路206为所述第一主体段201上开设的至少一第五孔2063,第五孔2063的孔内径小于第一孔20111的孔内径,第五孔2063用于通入可控制第一弯曲段202弯曲度的拉线,本发明实施例中所述第五孔2063为四个以对应所述医用导管2的第一弯曲段202可通过手柄控制并沿上、下、左、右进行控制,具体的上述第五孔2063中的拉线配置为上轮盘拉线131和下轮盘拉线124。
89.在本发明的其他实施例中,所述第三通路206也可以采用第六管2061这样的管结构,所述第六管2061的第六腔2062的内部用于通入可控制第一弯曲段202弯曲度的拉线。
90.进一步的,请参考图2,第一头段203上开设第一安装口2032和第二安装口2034,所述第一安装口2032用于安装摄像组件2035,所述第二安装口2034用于安装第一光源2036,具体的,所述摄像组件2035和第一光源2036均采用现有技术,其只需要实现第一头段203的可视化效果及照明效果即可,本发明对所述摄像组件2035和第一光源2036的结构不作赘述。
91.第一头段203开设第二孔2031,第二孔2031贯穿第一头段203并与第二通路205连通,在本发明实施例中具体为与第三管2051中第三腔2052的连通。第三孔2033贯穿第一头段203并用于与第一通路2011连通,在本发明实施例中具体为与第一管2014中第一腔20141连通。
92.请参考图5,下面描述医用导管2的第一主体段201在第二实施例的具体结构:
93.与第一实施例医用导管2不同的是,本实施例中第一主体段201的形状未改变,但第一通路2011与第二通路205的相对位置进行了改变,其中所述第一通路2011设置于第二通路205的内部,第一通路2011与所述第二通路205同轴或非同轴设置。在第一主体段201上同样开设四个第五孔2063用于设置内管拉线,以用于控制医用导管2的弯曲度。
94.具体的,请参考图5,在第一主体段201上开设第四孔2055,第一通路2011具体为设置在所述第四孔2055内的第二管204,所述第二管204具有第二腔2041用于通入医疗器械,第二通路205由设置于第四孔2055内的第五管2056以及所述第四孔2055内除第二管204和第五管2056之外的孔内空间共同构成,其中第五管2056的第五腔20561作为一个第二通路205用于安装电路/电线,除第二管204和第五管2056之外的孔内空间作为另一个第二通路205用于液体或气体介质的输送,利用除第二通路205进行液体或气体介质的输送,大大提
高了空间利用率,使医用导管2整体外径不扩大的情况下也能将第四孔2055的孔内径扩大至1.8mm,以获得和上述第一实施例一致的技术效果。
95.下面描述外管的具体结构:
96.请参考图6至图8,所述外管3包括第二主体段302、第二弯曲段304及第二头段305,第二头段305的近端与第二弯曲段304的远端连接,第二弯曲段的近段304与第二主体段302的远端连接,第二主体段302的近端与手柄连接,还包括
97.支撑部303,支撑部303至少为一个并设置于第二主体段302的远端,支撑部303的内部具有积存腔3032;
98.通路3021,通路3021贯穿第二主体段302,通路3021的远端连通积存腔3032,通路3021的近端与手柄连接;
99.支撑部303通过通路3021被注入介质至积存腔3032,使支撑部303膨胀或通过通路3021将介质从积存腔3032抽出,使支撑部303收缩,具体的,本发明实施例中所述支撑部303选用球囊。
100.请参考图10,三通件110安装在手柄主体1的右壳体104上,利用该三通件110用于连通水路或气路,以便于通入液体或气体充入支撑部303中。
101.具体的,请继续参考图6至图8,所述支撑部303的第一中心3031与第二主体段302的第二中心3023不同心。不同心使支撑部303具有与第二主体段302上通路3021连接的一个或多个连接端,所述连接端与通路3021的口部密封连接,本实施例中连接端仅为一个,其可以是连接口以便于与通路3021连通。所述不同心使得支撑部303与第二主体段302偏心布置,所述偏心布置使所述支撑部303膨胀时仅从一个方向膨胀撑起,所述支撑部303膨胀并带动整段外管移动并贴紧肠壁,利用支撑部303撑开肠道空间使得医用导管2至乳头的距离增加,为医用导管2的操作提供了空间和稳定性。
102.进一步的,请继续参考图7和图8,在所述第二主体段302上开设第三拉线孔306以及管腔3022,所述管腔3022用于供所述内管2通入,第二头段305上还开设第二第二拉线孔3051,在第二弯曲段304中也开设拉线孔并与上述第三拉线孔306、第二拉线孔3051对应,以用于供外管拉线301穿入。请参考图8,在第二头段305上开设开口3054和内管安装孔3053,该开口3054沿第二头段305的轴向开设,上述内管安装孔3053和开口3054之间互相连通,利用该开口3054可以使内管2在某一个方向上可以弯曲的角度更大,便于使用者进行操作。
103.进一步的,请继续参考图7和图8,在所述外管3的第二头段305上还设置第二光源3052,所述第二光源3052优选为led或光纤,所述光源使医用导管2和外管3一同进入胃部时可以照亮胃部的大空间。在第二弯曲段304和第二主体段302上也开设供电线穿入的电线孔路,以用于通过所述电线连接led或光纤为其提供电能。所述电线孔路的具体布置形式属于本领域技术人员的公知技术,本发明不作赘述。
104.下面描述医疗装置的具体结构:
105.如图9所述,医疗装置,包括上述医用导管2及与医用导管2配合使用的外管3和手柄,外管3的近端与手柄连接,医用导管2的近端也与手柄连接,医用导管2的远端从手柄的通道进入手柄并且从外管3的近端穿入,并从外管3的远端伸出。
106.下面描述手柄的具体结构:
107.请参考图10,本发明实施例所述手柄包括:
108.手柄主体1,手柄主体1具有通道孔143,外管3的远端通过外管过渡连接件135与所述手柄主体1连接,医用导管2通过所述通道孔143进入所述手柄主体1的内部并从所述外管3的远端进入所述外管3,以用于与所述外管3配合使用。
109.具体的,请参考图10,所述手柄主体1由左壳体103和右壳体104固接构成。
110.下面描述外管控弯机构的具体结构:
111.请参考图10和图11,所述手柄还包括外管控弯机构,所述外管控弯机构设置在所述手柄主体1的内部,所述外管控弯机构用于控制外管3的弯曲度,具体是控制外管3近端的弯曲度。
112.请继续参考图10和图11,外管控弯机构包括:
113.第一转动部;
114.第一活动部,第一活动部与第一转动部连接,转动部被赋予转动副并通过所述活动部实现在第一位置和第二位置之间的移动;
115.外管拉线301,外管拉线301的远端与活动部连接,外管拉线301的近端伸入外管3并与外管3的近端连接。
116.下面描述外管控弯机构中第一转动部的具体结构:
117.请参考图15,具体的,所述第一转动部在本发明实施例所述手柄中第一转动部具体采用抬钳器把手105和抬钳器转盘106,其中所述抬钳器把手105与所述抬钳器转盘106卡接并保持同轴。
118.下面描述外管控弯机构中第一活动部的具体结构:
119.请继续参考图10和图11和图15,所述第一活动部包括抬钳器拉杆113、抬钳器滑块115及抬钳器滑板116,所述抬钳器拉杆113的一端通过抬钳器拉杆卡扣112与所述抬钳器转盘106连接,所述抬钳器拉杆113的另一端通过滑块卡扣114与所述抬钳器滑块115连接,所述抬钳器滑块115安装在抬钳器滑板116的卡扣滑动槽1161内,所述抬钳器滑板116通过多个紧固件与所述右壳体104固接。
120.进一步的,请参考图11,在所述卡扣滑动槽1161的一侧开设拉线孔1162,所述拉线孔1162位于所述抬钳器滑板116的下部,以用于外管拉线301穿过所述拉线孔1162并伸入外管3内部与外管3近端连接。
121.下面描述内管控弯机构的结构:
122.内管控弯机构也设置于手柄主体1的内部,所述内管控弯机构用于控制医用导管2的弯曲度,本发明实施例所述手柄中的内管控弯机构具体是控制医用导管2近端在上、下、左、右四个方向的弯曲度。然而如本领域技术人员所理解的,根据不同的使用环境,所述内管控弯机构也可以除多方向之外仅控制一个方向的弯曲度。
123.内管控弯机构包括至少一套控制部件,所述一套控制部件用于控制医用导管2近端的两个方向,为了实现医用导管2近端在上、下、左、右四个方向的弯曲度,本发明实施例手柄中的内管控弯机构采用两套控制部件。为了实现两套控制部件在转动时互相不干涉,所述内管控弯机构还包括轮盘挡板133,轮盘挡板133固定于左壳体103内,上述控制部件分别设置在所述轮盘挡板133的两侧,具体是设置在轮盘挡板133的上下两侧。
124.所述控制部件包括:
125.第二转动部,所述第二转动部可转动的设置于手柄主体1内。
126.第一弹性件,第一弹性件与第二转动部连接,转动部被赋予转动副并通过第一弹性件实现在第三位置和第四位置之间的移动;
127.至少一内管拉线,内管拉线的近端与弹性件连接,内管拉线的远端伸入医用导管2并与医用导管2的近端连接。
128.下面描述内管控弯机构中第一套控制部件的具体结构:
129.请参考图12,具体的,所述第二转动部在本发明实施例所述手柄中采用下轮盘119,所述下轮盘119可转动的设置于左壳体103。所述第一弹性件为下轮盘弹簧片121,所述下轮盘弹簧片121的中心处通过紧固件与所述下轮盘119固接,所述下轮盘弹簧片121的两端分别与一根下轮盘拉线124的远端焊接,所述下轮盘拉线124的近端伸入医用导管2并延伸至与所述医用导管2的近端连接。
130.请参考图12,进一步的,为了保证下轮盘拉线124在活动过程中不会弯曲,在所述左壳体103还设置至少一下轮盘拉线卡扣125,所述下轮盘拉线卡扣125中设置供所述下轮盘拉线124定位的定位口以供所述下轮盘拉线124穿过。
131.请继续参考图12,进一步的,所述左壳体103还设置内管连接件134,所述医用导管2的远端与所述内管连接件134连接,医用导管2从内管连接件134处伸出并进入通道孔143进入手柄主体1的内部。通道孔143与内管连接件134之间的医用导管2的管体形成内管圈,通过调节该内管管圈的大小可以控制医用导管2的第一头段203的伸出与缩回。
132.请继续参考图12,进一步的,在所述左壳体103靠近下轮盘弹簧片121处还固接下轮盘挡边118,所述下轮盘挡边118将所述下轮盘弹簧片121卡在下轮盘挡边118与下轮盘119之间的间隙内,通过所述下轮盘挡边118将所述下轮盘弹簧片121限定在下轮盘挡边118的内侧,避免所述下轮盘弹簧片121弹起出现错误。
133.请继续参考图2,进一步的,所述内管控弯机构还包括至少两块下下轮盘弹簧片定位板122,优选的,本发明实施例手柄中所述下轮盘弹簧片定位板122为三块,相邻下轮盘弹簧片定位板122之间具有间距并固定于轮盘挡板133的下表面,相邻下轮盘弹簧片定位板122之间形成下轮盘弹簧片滑动槽123。所述下轮盘弹簧片滑动槽123可避免下轮盘弹簧片121与左壳体103及左壳体103上的其他零件产生摩擦。
134.下面描述内管控弯机构中第二套控制部件的具体结构:
135.所述第二套控制部件与所述第一套控制部件的结构及布置方式相同,不同之处在于各结构的安装方式如下:
136.请参考图13和图15,所述第二套控制部件中的第二转动部为上轮盘127,所述上轮盘127套设于下轮盘119的轴端,且所述下轮盘119的轴端又从所述上轮盘127的轴端伸出。上轮盘挡边126、三块上轮盘弹簧片定位板129及多块上轮盘拉线卡扣132均固定在轮盘挡板133的上表面,上轮盘弹簧片128卡在上轮盘挡边126与上轮盘127之间,所述上轮盘弹簧片128的两端分别延伸至相邻上轮盘弹簧片定位板129之间的上轮盘弹簧片滑动槽130中,且上轮盘弹簧片128的两端分别与一根上轮盘拉线131的远端连接,每一根上轮盘拉线131的近端贯穿所述上轮盘拉线卡扣132并伸入医用导管2且延伸至与所述医用导管2的近端连接。
137.请继续参考图13,在所述左壳体103的内部还具有内管通道117,所述内管通道117的上端与通道孔143连通,所述内管通道117的下端伸入外管过渡连接件135内。
138.请参考图14,所述内管控弯机构还包括拉线盖板136,所述拉线盖板136通过紧固件与所述轮盘挡板133的上表面固接,所述拉线盖板136将所述轮盘挡板133上表面的上轮盘弹簧片定位板129覆盖,避免上轮盘拉线131与其他零部件接触造成不必要的摩擦,以提高所述上轮盘拉线131的使用寿命,避免其磨损。另外所述拉线盖板136也具有限位作用,其可以将上轮盘弹簧片128限制于所述拉线盖板136的内部空间。
139.下面描述外管控弯自锁机构102。
140.为了实现所述外管3通过外管控弯机构控制弯曲度之后可以在该弯曲度保持,所述手柄还设置外管控弯自锁机构102,所述外管控弯自锁机构102包括:
141.按压部,按压部设置于手柄主体1中;
142.第三转动部,第三转动部可转动的设置于手柄主体1内,按压部被按压时可使第三转动部相对于手柄主体1转动并与第一转动部卡接。
143.具体的,请参考图11,所述按压部具体为弹簧销10201,所述弹簧销10201安装在所述右壳体104的上部,其中弹簧销10201的销部伸入所述右壳体104内。所述第三转动部具体为限位杆10202,第二限位卡扣10203固定于右壳体104上,所述限位杆10202与所述第二限位卡扣10203间隙配合,使所述限位杆10202可相对于所述第二限位卡扣10203作转动。
144.上述外管控弯自锁机构102的使用过程如下,所述弹簧销10201被按压时向下运动,使所述弹簧销10201的销头向所述限位杆10202施压,使所述限位杆10202沿所述第二限位卡扣10203转动并接触抬钳器转盘106,从而限制抬钳器转盘106的转动,以实现所述外管3在任意一个弯曲度的自锁。
145.请参考图11,为了实现所述外管3近端弯曲部分可在特定角度的自锁,在所述限位杆10202接触抬钳器转盘106的侧面还设置多个卡齿102021,且在所述抬钳器转盘106接触限位杆10202的外侧也设置多个与所述卡齿102021相啮合的齿槽1061,每一个卡齿102021或每一个齿槽1061之间的设置间距可大可小,若间距较大则实现所述外管3近端弯曲角度在大角度之间的切换,例如30
°
、60
°
、90
°
等。相反的若设置小间距则可实现所述外管3近端弯曲角度在小角度之间的切换。例如5
°
、10
°
、15
°
等。
146.以上所述抬钳器转盘106及所述限位杆10202上的齿槽结构也可以根据不同的使用情况进行改变,例如可以使用软性凸起之间相抵接等,且本发明也不局限于上述在抬钳器转盘106上设置齿槽1061或在限位杆10202上设置卡齿102021,其只要是能实现抬钳器转盘106与所述限位杆10202在接触时卡接的任意结构即可,本技术对此不作限制。
147.下面描述内管控弯自锁机构实施例一的具体结构,所述内管控弯曲自锁机构设置于手柄主体1的内部,其可以实现所述医用导管2在上、下、左、右中任意一个方向的锁定。
148.所述内管控弯自锁机构实施例一的结构包括:
149.第四转动部,所述第四转动部可转动的设置于所述手柄主体1内。具体的,请参考图17,所述第四转动部包括压杆144和锁紧把手145,其中所述锁紧把手145与所述压杆144的上端螺纹连接,所述压杆144的下端与所述左壳体103上部开设的螺纹孔螺接,所述压杆144的下端分别与一片锁紧片147的近端连接,相邻两片锁紧片147互相相邻且通过同一根轴1461连接轴座146,其中一片锁紧片147靠近下轮盘119的外侧,另一片锁紧片147靠近上轮盘127的外侧。在一对锁紧片147之间还连接弹簧148,所述弹簧148上所述一对锁紧片147的远端可相对的张开以松开上轮盘127和下轮盘119。
150.实施例一所述内管控弯机构的工作过程如下:
151.转动锁紧把手145,所述锁紧把手145旋转带动压杆144旋转并通过螺纹向下小幅度动作,动作过程中相邻锁紧片147以所述轴1461为旋转点转动,使所述相邻锁紧片147的远端相对的闭合并分别抱紧上轮盘127和下轮盘119,从而实现医用导管2在任意方向的自锁。而在非自锁状态时通过弹簧148使相邻锁紧片147的远端可相对的张开并接触对上轮盘127和下轮盘119的自锁。
152.下面描述内管控弯自锁机构实施例二的具体结构,所述内管控弯曲自锁机构设置于手柄主体1的外部。
153.请参考图15和图16,实施例二所述内管控弯自锁机构包括固定轴120,所述固定轴120的一端与所述下轮盘119的固定轴安装孔1191连接,且所述下轮盘119与所述下轮盘旋钮108连接,上轮盘127与所述上轮盘旋钮107连接。
154.请参考图15和图16,还包括第五转动部,所述第五转动部可转动的设置于固定轴120。具体的,所述第五转动部由转动限位块140和固定限位块141构成,转动限位块140的外部连接锁紧旋钮109,在所述转动限位块140的下表面设置凸部1401,所述固定限位块141与所述转动限位块140相对的一面1411由低至高递增成型,所述面1411使所述转动限位块140的转动可转变为固定限位块141的轴向运动。所述固定限位块141、转动限位块140分别与所述固定轴120的一端间隙配合,且所述固定轴120的端部通过防松螺母139螺接,避免所述转动限位块140从所述固定轴120处脱离。
155.垫片,本发明实施例手柄中由于存在两套控制部件,垫片采用两个分别为第一锁紧垫片1421和第二锁紧垫片1422,其中第一锁紧垫片1421置于所述固定限位块141背面的开口中,第二锁紧垫片1422设置于上轮盘旋钮107和下轮盘旋钮108之间,且所述第二锁紧垫片1422与下轮盘119的轴端间隙配合,所述第二锁紧垫片1422的外径大于所述下轮盘旋钮的中心孔径。
156.实施例二所述内管控弯锁定机构的工作过程如下:
157.请参考图15和图16,旋转锁紧旋钮109带动转动限位块140旋转,转动限位块140沿面1411转动后使所述固定限位块141受到在轴向上的挤压力从而实现轴向移动,由于固定限位块141的背面设置第一锁紧垫片1421,第一锁紧垫片1421受挤压并沿轴向对所述下轮盘旋108施压,所述下轮盘旋钮108受挤压力移动,在移动过程中所述第一锁紧垫片1421受压产生形变,所述第一锁紧垫片1421形变后增大阻尼并抱紧下轮盘119的轴端,使其无法转动。同时下轮盘旋钮108被挤压后在下轮盘119的轴端沿轴向移动并接触上轮盘旋钮107,使上轮盘旋钮107处的第二锁紧垫片1422的内径沿径向收缩并抱紧上轮盘127的轴端,从而锁紧上轮盘127,由此实现上轮盘127和下轮盘119弯曲度的锁定。
158.下面描述内管锁紧机构101。
159.为了限制医用导管2相对于外管3进一步活动,所述手柄主体1上还设置内管锁紧机构101,所述内管锁紧机构101设置于手柄主体1的外部并靠近通道孔143,所述内管锁紧机构101在第一种实施例的结构如下:
160.所述内管锁紧机构101第一固定部及与第一固定部转动连接的第一旋转部,第一旋转部被赋予转动副以相对于第一固定部旋转;
161.还包括夹紧部,夹紧部设置于第一固定部与第一旋转部之间,第一旋转部旋转后
向夹紧部施压,夹紧部被施压并沿径向挤压内管。
162.具体的,请参考图18,所述第一固定部具体为锁紧座10102,所述第一旋转部具体为锁紧螺母10100,所述锁紧座10102的一端具有外螺纹101020,所述锁紧螺母10100具有可与所述外螺纹101020螺纹连接的内螺纹孔101001,所述内螺纹孔101001贯穿所述锁紧螺母10100,在所述锁紧座10102上也开设供内管贯穿的通孔,所述锁紧座10102与锁紧螺母10100之间设置内管锁紧垫片10101,所述内管锁紧垫片10101的外径可与所述内螺纹孔101001的孔径配合,该内管锁紧垫片10101的材料不限于硅胶、橡胶等,所述内管锁紧垫片10101上也开设可供医用导管2通过的第一夹紧孔101010。
163.实施例一所述内管锁紧机构101的具体工作过程如下:
164.锁紧螺母10100正向旋入锁紧座10102的外螺纹101020上,锁紧螺母10100在旋入过程中逐渐挤压内管锁紧垫片10101,使内管锁紧垫片10101的第一夹紧孔101010的孔径逐渐缩小以抱紧医用导管2的外径,从而实现医用导管2的锁紧。相反的,当反向旋转锁紧螺母10100,使得内管锁紧垫片10101不再受挤压并且实现内管锁紧垫片10101中通孔孔径的复位,从而松开医用导管2,使医用导管2可相对于外管3进行移动。
165.实施例二所述内管锁紧机构101的具体结构如下:
166.请参考图19至图21,包括夹紧座10104和夹紧部,所述夹紧座10104内设置转动盘10105和固定盘10108,所述夹紧部为由多片夹紧片10109构成的可调式夹紧组件,各片夹紧片10109之间形成第二夹紧孔101093,该可调式夹紧组件通过转动盘10105转动并驱动作开合运动,使第二夹紧孔101093的孔径沿径向变化。
167.其中,转动盘10105上具有第一连接部,该第一连接部为开设在转动盘10105上的第一滑动槽101052,每片夹紧片10109的一侧设置与所述第一连接部对应连接的第二连接部,第二连接部具体为沿夹紧片10109一侧凸出的第一凸起101091。
168.当转动盘10105转动时,第一滑动槽101052带动夹紧片10109上的第一凸起101091沿第一滑动槽101052的移动路径进行移动。
169.请继续参考图19置图21,在固定盘10108上具有第三连接部,第三连接部为开设于固定盘10108上的第二滑动槽101081,夹紧片10109的另一侧设置第二凸起101092与所述第二滑动槽101081连接,当夹紧片10109上的第二凸起101092转动时沿所述第二滑动槽101081移动。
170.上述构成可调式夹紧组件的多个夹紧片10109沿周向均布,相邻夹紧片10109之间部分相切并形成相同的夹角,使可调式夹紧组件径向开合运动中,每片夹紧片10109之间没有缝隙。
171.在转动盘10105上还开设把手安装口101051用于嵌入旋转把手10107,在固定盘10108的轴心还开设转动盘贯通口101053,在转动盘的轴心也开设固定盘贯通口101082,上述转动盘贯通口101053和固定盘贯通口101082用于供医用导管2穿过。夹紧座10104套设于转动盘10105的外侧,在夹紧座10104上具有一沿径向延伸的第一限位卡扣10103,转动盘10105的外侧开设至少一防转卡扣槽10106并用于与所述第一限位卡扣10103卡接,以限制转动盘10105的转动。
172.实施例三所述内管锁紧机构101的具体结构如下:
173.所述内管锁紧机构101包括第二固定部及与所述第二固定部铰接的第二旋转部,
所述第二固定部与所述第二旋转部未连接的另一端之间通过紧固装置连接。
174.请参考图22,具体的,所述第二固定部采用固定端10112,第二旋转部采用夹紧端10110,所述固定端10112和夹紧端10110上分别开设用于配合医用导管2外径的半圆形夹紧口10114,所述固定端10112一端与所述夹紧端10110的一端通过铰链10111铰接,所述固定端10112的另一端和夹紧端10110的另一端分别开设螺纹孔。上述紧固装置为带有螺纹的夹紧把手10113,通过旋转夹紧把手10113与所述夹紧端10110、固定端10112带有螺纹孔的一端连接,使所述夹紧端10110相对于所述固定端10112施压并抱紧医用导管2。
175.实施例四所述内管锁紧机构101的具体结构如下:
176.请参考图23,第一部,所述第一部与所述手柄主体1连接,在所述第一部上开设孔。
177.第二部,所述第二部覆盖于所述内管的移动端并可与所述第一部通过凸出结构抵接或通过齿槽结构卡接。
178.具体的,请参考图14,所述第一部具体为管套10116,所述管套10116设置于手柄主体1上,在所述管套10116上开设可供医用导管2伸入的孔。
179.所述第二部具体为套管10115,所述套管10115覆盖于医用导管2的移动端。
180.具体的,所述凸出结构是指设置在孔内壁的至少一凸点及设置在套管10115外侧的至少另一凸点,所述凸点为软性结构,通过将套管10115与所述管套10116上的孔配合,使孔内壁的凸点与套管10115外侧的另一凸点相抵接,使套管10115与管套10116之间的摩擦力增加以实现对医用导管2的固定。
181.具体的,所述齿槽结构是指设置于套管10115外侧上的至少一第二齿10118及设置于管套10116孔内壁上的至少一槽或者也可以是设置在管套10116孔内壁上的至少一第一齿10117以及设置在套管10115外侧的至少一槽,该齿槽结构也可以增加套管10115与管套10116之间的摩擦力以实现对医用导管2的固定。
182.下面描述所述医疗装置的具体使用过程:
183.第一步:请参考图24,将医用导管2头端穿过内管锁紧机构101并从通道孔143进入内管通道117,缓慢推送医用导管2直至进入外管3内并从外管3的远端伸出4~5cm(该状态医用导管2的第一弯曲段202全部伸出)。
184.参照内管锁紧机构101第一实施例,通过在锁紧座10102上旋转锁紧螺母10100,使内管锁紧垫片10101被挤压,进一步使第一夹紧孔101010沿径向夹紧医用导管2,从而使医用导管2相对于外管3的相对位置被固定。开启医用导管2上摄像组件2035及第一光源2036和外管3上的第二第二光源3052进行照明和摄像。使用者左手持手柄,右手持外管3管体部距离外管3的第二头段305约20~30cm,将外管3从患者口部插入。
185.第二步:请参考图25和图26,右手推送外管3的过程中,不断使用左手手指转动上轮盘127和下轮盘119以控制医用导管2的弯曲度,具体过程如下:
186.请参考图12至14,以其中一套控制部件为例,转动上轮盘旋钮107,上轮盘旋钮107带动上轮盘127转动,进而控制上轮盘弹簧片128在上轮盘弹簧片滑动槽130中运动,上轮盘弹簧片128运动进一步带动上轮盘拉线131动作,由于上轮盘拉线131穿入医用导管2的第一主体段201中第一管2014的第一腔20141并与第一弯曲段202连接,使得上轮盘拉线131动作的时候可以带动第一弯曲段202动作以控制第一弯曲段202弯曲,配合摄像组件2035反馈的图像穿过食管进如胃部,利用第一光源2036和第二第二光源3052照亮胃部空间之后穿过幽
门进入十二指肠。
187.第三步:请参考图10和图27,使用注射器从手柄胃尾部的球囊阀111将气体或液体通过管路注入外管3的通路3021中,气体或液体经过所述通路3021并进入支撑部303的积存腔3032中,使所述支撑部303膨胀,所述支撑部303膨胀之后将十二指肠内部的空间撑起。在本发明的其他实施例中,也可以通过注水注气管137通过管路与通路3021连通,以通过所述通路3021向所述支撑部303的积存腔3032中输送气体或液体。
188.第四步:请参考28,左手操作手柄进行外管控弯,外管控弯的具体过程如下:
189.所述外管控弯机构的具体工作过程如下:
190.请参考图10和图11,使用者操作抬钳器把手105,所述抬钳器把手105带动抬钳器转盘106转动,所述抬钳器转盘106被赋予转动副并通过抬钳器拉杆113将所述转动副转变为所述抬钳器滑块115在抬钳器滑板116的卡扣滑动槽1161内往复移动的移动副,所述抬钳器滑块115在移动过程中通过外管拉线301带动外管3的近端弯曲,从而使所述外管3近端在弯曲时提供挡板效果,由此改变与所述外管3配合的医用导管2的前进方向,进镜到十二指肠过程中由原来的直视方向更改为侧视方向,使所述医用导管2可以对准位于十二指肠降部侧壁上的乳头并继续向胆总管的方向进入。通过控制部件将医用导管2回撤至与外管3的第二头段305对齐。通过内管锁紧机构101再次将医用导管2与外管3的相对位置固定。
191.当所述外管3的第二弯曲段304的弯曲抬起90
°
时,由于医用导管2位于外管3中,使得医用导管2也随外管3弯曲90
°
左右,请参考图29,所述医用导管2第一头段203的视野方向从与外管3同一方向更改为垂直于外管3,形成了侧视的观察效果。使用者右手继续缓慢插入外管3,直至找到十二直长降部侧壁上的乳头结构。
192.请参考图30,松开内管锁紧机构101,使内管2可以继续深入并通过内管控弯机构继续控制医用导管2第一弯曲段202的弯曲角度,使乳头出现在医用导管2第一头段203的视野中。从手柄的器械通道插入导丝并顺序经过医用导管2第一主体段201上的第一腔2041且穿过第一弯曲段202从第四孔2033处伸出,通过摄像组件2035回传的图像上观察导丝进入胆管或胰管。
193.如果乳头开口较小,可沿导丝插入切割刀或者乳头扩张球囊进行乳头开口扩张工作。通过推进医用导管2的第一头段203逐步深入寻找结石或可疑肿瘤突起。
194.第五步:发现结石后拔出导丝后沿医用导管2的第一通路插入光纤或电极,具体为将光纤或电极从医用导管2的第一管2014中的第一腔20141顺序经过第一弯曲段202并从第四孔2033处伸出进行激光碎石或液电碎石。
195.请继续参考图31,发现可疑肿瘤突起时,可拔出导丝,插入活检钳,活检钳从医用导管2的第一管2014中的第一腔20141顺序经过第一弯曲段202并从第四孔2033处伸出进行组织活检。
196.术后,通过注射器通过抽吸口138及管路及原注入通道将支撑部303内积存腔3032的气体或液体抽出,然后再将医用导管2和外管3一同拔出人体。
197.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
198.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并
不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。