1.本发明有关于一种角度感知装置,特别有关一种移动载具的角度感知装置。
背景技术:
2.在科技日益精进的情况下,现行的动力车的转向系统大多配置动力方向盘,使得驾驶人能够轻易操控方向盘。目前动力方向盘大多搭配多个(例如二个)角度传感器以感测驾驶人的操控,其一用于测量方向盘的旋转构件的旋转角,其二用于确定旋转构件较粗略的旋转圈数,接着,透过上述两组角度信息的配合演算,以求得旋转构件的总体角度信息。举例来说,前案us9097559与jp2004184264中都描述到,至少需要两组角度侦测器,且需要将两组的信息予以组合演算,才能求得方向盘旋转构件的角度信息。
3.然而,采用两组角度侦测器的转向系统无疑增加了资源、时间与人力成本,也伴随着复杂结构与体积庞大的问题与缺点。
技术实现要素:
4.本发明的一目的在于提供一种角度感知装置,用以解决以上先前技术所提到的困难。
5.本发明的一实施例提供的一种角度感知装置。角度感知装置包括一壳体、一连动齿轮、一第一齿轮组、一第二齿轮组、一磁性元件、一角度感知单元与一处理单元。连动齿轮可枢转地位于壳体上,用以耦接一移动载具的一转向柱。第一齿轮组啮合连动齿轮,用以将连动齿轮的旋转角度等比例地转换为位于360
°
范围内的比对角度。第二齿轮组连接第一齿轮组,用以随着第一齿轮组连同转动所述的比对角度。磁性元件固定于第二齿轮组上。角度感知单元相对连动齿轮配置,并与磁性元件保持间隙,用以感测磁性元件的转动所产生的磁场变化值。处理单元电连接角度感知单元,用以依据磁性元件所产生的磁场变化值,比对出转向柱的绝对角度。
6.依据本发明一或多个实施例,在上述的角度感知装置中,第二齿轮组包含一齿轮本体与一磁铁座。磁铁座位于齿轮本体的一面,且朝角度感知单元的方向凸出。磁铁座的一端形成有一容置槽,容置槽用以匹配地容纳磁性元件。
7.依据本发明一或多个实施例,在上述的角度感知装置中,壳体包含一顶盖及一底盖。底盖与顶盖彼此相互组合。底盖面向顶盖的一面具有一凹陷部,连动齿轮与第一齿轮组分别位于凹陷部内。
8.依据本发明一或多个实施例,在上述的角度感知装置中,第一齿轮组包含一第一减速齿轮部、一第二减速齿轮部与一第三减速齿轮部。第一减速齿轮部枢设于壳体上,且啮合连动齿轮,用以降低连动齿轮的转速。第二减速齿轮部枢设于壳体上,且啮合第一减速齿轮部,用以降低第一减速齿轮部的转速。第三减速齿轮部同轴枢设于第一减速齿轮部上,啮合第二减速齿轮部与第二齿轮组,用以降低第二减速齿轮部的转速,并同步转动磁性元件。
9.依据本发明一或多个实施例,在上述的角度感知装置中,第一减速齿轮部包含一
第一枢轴、一第一大齿轮与一第一小齿轮。第一大齿轮透过第一枢轴枢设于壳体上,啮合连动齿轮,且与连动齿轮共处同一阶层高度。第一小齿轮透过第一枢轴同轴固接至第一大齿轮相对壳体的一面。第一大齿轮的齿数大于第一小齿轮的齿数。
10.依据本发明一或多个实施例,在上述的角度感知装置中,第二减速齿轮部包含一第二枢轴、一第二大齿轮与一第二小齿轮。第二大齿轮透过第二枢轴枢接至壳体上,啮合第一小齿轮,且与第一小齿轮共处同一阶层高度。第二小齿轮透过第二枢轴同轴固接至第二大齿轮相对壳体上。第二大齿轮的齿数大于第二小齿轮的齿数,且第二齿轮组透过第二枢轴同轴枢接至第二小齿轮相对壳体的一面。
11.依据本发明一或多个实施例,在上述的角度感知装置中,第三减速齿轮部包含一第三大齿轮及一第三小齿轮。第三大齿轮透过第一枢轴同轴枢接至第一小齿轮相对第一大齿轮的一面,啮合第二小齿轮,且与第二小齿轮共处同一阶层高度。第三小齿轮透过第一枢轴同轴固接至第三大齿轮相对壳体上,且啮合第二齿轮组,且与第二齿轮组共处同一阶层高度,第三大齿轮的齿数大于第三小齿轮的齿数。
12.依据本发明一或多个实施例,在上述的角度感知装置中,第一齿轮组包含一第一减速齿轮部、一第二减速齿轮部与一第三减速齿轮部。第一减速齿轮部透过一第一枢轴枢设于壳体上,啮合连动齿轮,用以降低连动齿轮的转速。第二减速齿轮部透过一第二枢轴枢设于壳体上,啮合第一减速齿轮部,用以降低第一减速齿轮部的转速。第三减速齿轮部透过一第三枢轴枢设于壳体上,啮合第二齿轮组,用以降低第二减速齿轮部的转速,并同步转动磁性元件。第二齿轮组透过一第四枢轴枢设于壳体上,且第一枢轴、第二枢轴、第三枢轴与第四枢轴彼此平行。
13.依据本发明一或多个实施例,在上述的角度感知装置中,第一减速齿轮部包含一第一大齿轮与一第一小齿轮。第一大齿轮透过第一枢轴枢设于壳体上,啮合连动齿轮,且与连动齿轮共处同一阶层高度。第一小齿轮透过第一枢轴同轴固接至第一大齿轮相对壳体的一面,第一大齿轮的齿数大于第一小齿轮的齿数。
14.依据本发明一或多个实施例,在上述的角度感知装置中,第二减速齿轮部包含一第二大齿轮及一第二小齿轮。第二大齿轮透过第二枢轴枢接至壳体上,啮合第一小齿轮,且与第一小齿轮共处同一阶层高度。第二小齿轮透过第二枢轴同轴固接至第二大齿轮相对壳体的一面,其中第二大齿轮的齿数大于第二小齿轮的齿数。
15.依据本发明一或多个实施例,在上述的角度感知装置中,第三减速齿轮部包含一第三大齿轮与一第三小齿轮。第三大齿轮透过第三枢轴同轴枢接至壳体上,啮合第二小齿轮,且与第二小齿轮共处同一阶层高度。第三小齿轮透过第三枢轴同轴固接至第三大齿轮相对壳体的一面,且啮合第二齿轮组,且与第二齿轮组共处同一阶层高度。第三大齿轮的齿数大于第三小齿轮的齿数。
16.依据本发明一或多个实施例,在上述的角度感知装置中,角度感知单元包含一配线板、一第一磁性感知元件与一第二磁性感知元件。第一磁性感知元件与第二磁性感知元件分别位于配线板的二相对面,且第一磁性感知元件的感测信号与第二磁性感知元件的感测信号为互补。第二磁性感知元件位于第一磁性感知元件与磁性元件之间。
17.依据本发明一或多个实施例,在上述的角度感知装置中,处理单元将转向柱能够旋转的最大旋转角度除以角度感知单元的总解析度以得出单位解析度,以及依据角度感知
单元对磁性元件转动所感应的磁场变化值,比对出转向柱的绝对角度。
18.如此,透过以上各实施例的所述架构,本发明不仅降低资源、时间与人力成本,也克服了复杂结构与体积庞大所带来的问题与缺点。
19.以上所述仅是用以阐述本发明所欲解决的问题、解决问题的技术手段、及其产生的功效等等,本发明的具体细节将在下文的实施方式及相关附图中详细介绍。
附图说明
20.为让本发明的上述和其他目的、特征、优点与实施例能更明显易懂,所附附图的说明如下:
21.图1绘示依照本发明一实施例的角度感知装置的分解图;
22.图2绘示图1的角度感知装置透视其顶盖所呈现的组合图;
23.图3a及图3b分别绘示图1的角度感知装置的比对角度与绝对角度的比对示意图;
24.图4绘示依照本发明一实施例的角度感知装置的上视图;以及
25.图5绘示依照本发明一实施例的角度感知单元的示意图。
26.【符号说明】
27.10、11:角度感知装置
28.100:壳体
29.110:顶盖
30.120:底盖
31.121:凹陷部
32.122:开口
33.200:连动齿轮
34.210:齿轮体
35.220:贯穿口
36.221:内壁
37.230:耦接部
38.300:第一齿轮组
39.310:第一减速齿轮部
40.311:第一枢轴
41.312:第一大齿轮
42.313:第一小齿轮
43.320:第二减速齿轮部
44.321:第二枢轴
45.322:第二大齿轮
46.323:第二小齿轮
47.330:第三减速齿轮部
48.331:第三枢轴
49.332:第三大齿轮
50.333:第三小齿轮
51.340:第二齿轮组
52.341:齿轮本体
53.342:磁铁座
54.343:容置槽
55.344:第四枢轴
56.345:轴心方向
57.400:磁性元件
58.500、501:角度感知单元
59.510:配线板
60.520:第一磁性感知元件
61.530:第二磁性感知元件
62.600:处理单元
63.a、b:电压值
具体实施方式
64.以下将以附图揭露本发明的复数实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,熟悉本领域的技术人员应当了解到,在本发明部分实施方式中,这些实务上的细节并非必要的,因此不应用以限制本发明。此外,为简化附图起见,一些已知惯用的结构与元件在附图中将以简单示意的方式绘示。另外,为了便于读者观看,附图中各元件的尺寸并非依实际比例绘示。
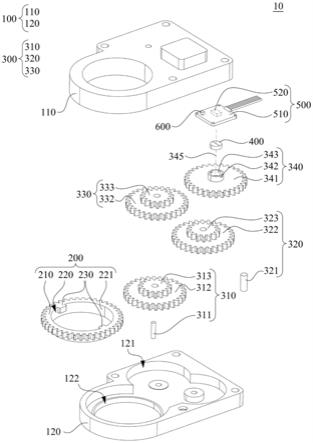
65.图1绘示依照本发明一实施例的角度感知装置10的分解图。图2绘示图1的角度感知装置10透视其顶盖110所呈现的组合图。如图1与图2所示,此角度感知装置10。角度感知装置10包括一壳体100、一连动齿轮200、一第一齿轮组300、一第二齿轮组340、一磁性元件400、一角度感知单元500与一处理单元600。连动齿轮200可枢转地位于壳体100上,呈中空状,用以耦接一移动载具的方向盘的转向柱(图中未示)。移动载具例如为机动车或堆高车等,然而,本发明不限于移动载具的种类。第一齿轮组300啮合连动齿轮200,用以将连动齿轮200的旋转角度等比例地转换为位于360
°
范围内的比对角度。第二齿轮组340连接第一齿轮组300,用以随着第一齿轮组300连同转动所述的比对角度。磁性元件400固定于第二齿轮组340上,且面向角度感知单元500,在本实施例中,磁性元件400的磁场方向与第一磁性感知元件520的磁场方向及第二磁性感知元件520的磁场方向相互平行。角度感知单元500相对连动齿轮200配置,并与磁性元件400保持间隙,用以感测磁性元件400的转动所产生的磁场变化值。处理单元600电连接角度感知单元500,用以依据磁性元件400所产生的磁场变化值,比对出转向柱的绝对角度。
66.如图1与图2所示,在本实施例中,壳体100包含一顶盖110及一底盖120。底盖120与顶盖110彼此相互组合,使得上述的连动齿轮200、第一齿轮组300、第二齿轮组340、磁性元件400、角度感知单元500与处理单元600能够固定于底盖120与顶盖110之间。更具体地,底盖120包含一凹陷部121与一开口122。凹陷部121形成于底盖120面向顶盖110的一面。开口122形成于凹陷部121的底部,且从凹陷部121的底部贯穿底盖120。凹陷部121能够容纳连动齿轮200与第一齿轮组300。
67.在本实施例中,连动齿轮200具有一齿轮体210、一贯穿口220与多个耦接部230。贯穿口220贯穿齿轮体210,且连接齿轮体210的二相对面。这些耦接部230间隔地形成于齿轮体210面向贯穿口220的内壁221。如此,移动载具的转向柱能够伸入贯穿口220,并卡合于耦接部230上,用以带动连动齿轮200于凹陷部121内旋转。
68.第一齿轮组300包含一第一减速齿轮部310、一第二减速齿轮部320与一第三减速齿轮部330。第一减速齿轮部310枢设于壳体100上,且啮合连动齿轮200,用以降低连动齿轮200的转速。更具体地,第一减速齿轮部310包含一第一枢轴311、一第一大齿轮312与一第一小齿轮313。第一大齿轮312透过第一枢轴311枢设于底盖120的凹陷部121内,啮合连动齿轮200,且与连动齿轮200共处同一阶层高度。第一小齿轮313透过第一枢轴311同轴固接至第一大齿轮312相对底盖120的一面,且第一大齿轮312的齿数大于第一小齿轮313的齿数。换句话说,第一小齿轮313透过第一枢轴311固接第一大齿轮312,故,第一小齿轮313与第一大齿轮312同步运动。
69.第二减速齿轮部320枢设于壳体100上,且啮合第一减速齿轮部310,用以降低第一减速齿轮部310的转速。更具体地,第二减速齿轮部320包含一第二枢轴321、一第二大齿轮322与一第二小齿轮323。第一枢轴311、第二枢轴321与转向柱(图中未示)彼此平行。第二大齿轮322透过第二枢轴321枢接至底盖120的凹陷部121内,啮合第一小齿轮313,且与第一小齿轮313共处同一阶层高度。第二小齿轮323透过第二枢轴321同轴固接至第二大齿轮322相对底盖120的一面上,换句话说,第二小齿轮323透过第二枢轴321固接第二大齿轮322,故,第二小齿轮323与第二大齿轮322同步运动。第二大齿轮322的齿数大于第二小齿轮323的齿数,且第二齿轮组340透过第二枢轴321同轴枢接至第二小齿轮323相对底盖120的一面,换句话说,第二齿轮组340与第二减速齿轮部320共用轴心,第二齿轮组340能够绕着第二枢轴321相对第二减速齿轮部320旋转,且第二齿轮组340与第二减速齿轮部320能够各自旋转,互不干涉。
70.第三减速齿轮部330同轴枢设于第一减速齿轮部310上,啮合第二减速齿轮部320与第二齿轮组340,用以降低第二减速齿轮部320的转速,并同步转动磁性元件400。换句话说,第一减速齿轮部310与第三减速齿轮部330共用轴心,且第三减速齿轮部330能够绕着第一枢轴311相对第一减速齿轮部310旋转,且第一减速齿轮部310与第三减速齿轮部330能够各自旋转,互不干涉。
71.更具体地,第三减速齿轮部330包含一第三大齿轮332及一第三小齿轮333。第三大齿轮332透过第一枢轴311同轴枢接至第一小齿轮313相对第一大齿轮312的一面,啮合第二小齿轮323,且与第二小齿轮323共处同一阶层高度。第三大齿轮332的齿数大于第三小齿轮333的齿数,且第三小齿轮333透过第一枢轴311同轴固接至第三大齿轮332相对底盖120的一面,啮合第二齿轮组340,且与第二齿轮组340共处同一阶层高度。换句话说,第三小齿轮333透过第一枢轴311固接第三大齿轮332,故,第三小齿轮333与第三大齿轮332同时运动。故,连动齿轮200、第一小齿轮313、第二小齿轮323、第三小齿轮333与磁性元件400分别处于不同阶层高度。
72.如此,由于第一齿轮组300的第一减速齿轮部310、第二减速齿轮部320与第三减速齿轮部330经配置后具有适当的减速齿轮比,故,透过适当的减速齿轮比,能够让第二齿轮组340的旋转角度等比例地转换为降速至360
°
的范围内。
73.需了解到,由于具有共用轴心(即第一枢轴311)的第一减速齿轮部310与第三减速齿轮部330彼此叠合,以及具有共用轴心(即第二枢轴321)的第二减速齿轮部320与第二齿轮组340彼此叠合,故,本实施例的角度感知装置10能够得到体积缩小的优点。
74.此外,第二齿轮组340包含一齿轮本体341与一磁铁座342。磁铁座342位于齿轮本体341的一面,且朝角度感知单元500的方向凸出。磁铁座342的一端形成有一容置槽343,容置槽343用以匹配地容纳磁性元件400,且磁铁座342的轴心方向345与第一磁性感知元件520的感测基准点共有同轴心。齿轮本体341透过第一枢轴311同轴枢接至第二小齿轮323相对第二大齿轮322的一面。第二减速齿轮部320与第二齿轮组340能够各自旋转,互不干涉。
75.再者,角度感知单元500配置于顶盖110的内壁,且角度感知单元500包含一配线板510与一第一磁性感知元件520。配线板510包含彼此相对的二面。第一磁性感知元件520焊接于配线板510的其中一面,且面向磁性元件400,并且非接触地对齐磁性元件400。举例来说,但不以此为限,磁性元件400的轴心的正投影与第一磁性感知元件520及第二磁性感知元件530的感测基准点正投影重叠)。
76.产品设计时,设计者先将转向柱能够旋转的最大旋转角度除以角度感知单元500的总解析度以得出单位解析度,意即,将360
°
分成总解析经度的度数以得出单位解析经度。如此,当驾驶员透过方向盘转动上述转向柱达一旋转角度,且第一齿轮组300将此旋转角度等比例地降速成一比对角度,意即,磁性元件400相对角度感知单元500转动此比对角度时,角度感知单元500感测磁性元件400的转动所产生的磁场变化值(如电压值),故,处理单元600便依据此磁场变化值(如电压值)比对出转向柱的绝对角度。
77.图3a及图3b分别绘示图1的角度感知装置的比对角度与绝对角度的比对示意图。在本实施例中,移动载具的转向柱左转右转约各2.5圈,故,如图3a所示,转向柱能够旋转的最大旋转角度为0
°
~1800
°
。由于角度感知单元500的解析度为12位元(bit),角度感知单元500的总解析经度为4096(即2^12),故,设计者使先是将1800
°
分成4096阶的度数,即图3a的横轴分为4096个尺度。接着,将4096个尺度分别一一分别对应图3a的电压值a~b范围内的不同电压值(图3a)。接着,如图3b所示,设计者改将360
°
分成4096阶的度数,并沿用图3a的各个4096个尺度所分别对应的电压值。
78.如此,举例来说,在本实施例中,角度感知装置10的基本解析度是0.439
°
(即1800/4096)。故,如图3a与图3b所示,处理单元600(图2)能够在电压值a~b的范围内,从4096阶中任一不同的角度中等比例地比对出对应的转向柱的绝对角度(图3a)。
79.然而,本发明不限于此,其他实施例中,角度感知单元500的解析度亦可大于12位元。
80.举例来说,驾驶员乘坐上述移动载具在平路行驶直线方向,且驾驶员以手操作方向盘时,移动载具在平路行驶时一般约有2
°
的偏摆量,然而,因为本实施例的角度感知装置所测得的转向柱的角度解析度为0.439
°
,远远小于平路直线行驶的方向盘2
°
的偏摆量,如此,代表本实施例的角度感知装置的角度侦测具有高于实际需求的解析度,能够做非常精密的角度测量。
81.须了解到,由于仅靠单个角度感知单元就能得出上述转向柱所旋转的绝对角度,本实施例便不需配置另外的角度传感器至转向柱的连动齿轮旁,不需收集转向柱的旋转圈数。
82.图4绘示依照本发明一实施例的角度感知装置11的上视图。如图4所示,此实施例的角度感知装置11与图1的角度感知装置10大致相同,其差异在于,第一齿轮组300包含一第一减速齿轮部310、一第二减速齿轮部320与一第三减速齿轮部330。第一减速齿轮部310透过一第一枢轴311枢设于壳体100上,啮合连动齿轮200,用以降低连动齿轮200的转速。第二减速齿轮部320透过一第二枢轴321枢设于壳体100上,啮合第一减速齿轮部310,用以降低第一减速齿轮部310的转速。第三减速齿轮部330透过一第三枢轴331枢设于壳体100上,啮合第二齿轮组340,用以降低第二减速齿轮部320的转速,并同步转动磁性元件400。第二齿轮组340透过一第四枢轴344枢设于壳体100上,且第一枢轴311、第二枢轴321、第三枢轴331、第四枢轴344与转向柱(图中未示)彼此平行。如此,透过第一减速齿轮部310、第二减速齿轮部320与第三减速齿轮部330依序降低连动齿轮200的转速,磁性元件400能够被转换为360
°
以内的比对角度。
83.更具体地,第一减速齿轮部310包含一第一大齿轮312与一第一小齿轮313。第一大齿轮312透过第一枢轴311枢设于壳体100上,啮合连动齿轮200,且与连动齿轮200共处同一阶层高度。第一小齿轮313透过第一枢轴311同轴固接至第一大齿轮312相对壳体100的一面,第一大齿轮312的齿数大于第一小齿轮313的齿数,换句话说,第一小齿轮313透过第一枢轴311固接第一大齿轮312,故,第一小齿轮313与第一大齿轮312同步运动。
84.第二减速齿轮部320包含一第二大齿轮322及一第二小齿轮323。第二大齿轮322透过第二枢轴321枢接至壳体100上,啮合第一小齿轮313,且与第一小齿轮313共处同一阶层高度。第二小齿轮323透过第二枢轴321同轴固接至第二大齿轮322相对壳体100的一面,换句话说,第二小齿轮323透过第二枢轴321固接第二大齿轮322,故,第二小齿轮323与第二大齿轮322同步运动。
85.第三减速齿轮部330包含一第三枢轴331、一第三大齿轮332与一第三小齿轮333。第三大齿轮332透过第三枢轴331同轴枢接至壳体100上,啮合第二小齿轮323,且与第二小齿轮323共处同一阶层高度。第三小齿轮333透过第三枢轴331同轴固接至第三大齿轮332相对壳体100的一面,且啮合第二齿轮组340,且与第二齿轮组340共处同一阶层高度,换句话说,第三小齿轮333透过第三枢轴331固接第三大齿轮332,故,第三小齿轮333与第三大齿轮332同步运动。
86.图5绘示依照本发明一实施例的的角度感知单元501的示意图。如图5所示,此实施例的角度感知单元501与图1的角度感知单元500大致相同,其差异在于,角度感知单元501更包含一第二磁性感知元件530,且第二磁性感知元件530的感测信号与第一磁性感知元件520的感测信号为互补。第二磁性感知元件530焊接于配线板510的另面,且背向第一磁性感知元件520与磁性元件400,使得第二磁性感知元件530位于第一磁性感知元件520与磁性元件400之间。举例来说,但不以此为限,磁性元件400轴心的正投影与第一磁性感知元件520及第二磁性感知元件530的感测基准点正投影重叠。
87.由于第一磁性感知元件520或第二磁性感知元件530皆能感测到磁性元件400的磁场变化值(如电压值),且第二磁性感知元件530的感测信号与第一磁性感知元件520的感测信号为互补,故,本实施例中,透过判断第二磁性感知元件530与第一磁性感知元件520互为相反的磁场变化值是否产生异常,以作为判断此角度感知装置的角度感知单元501是否出现故障,进而提升角度感知单元501的信赖度。
88.如此,透过以上各实施例的所述架构,本发明不仅降低资源、时间与人力成本,也克服了复杂结构与体积庞大所带来的问题与缺点。
89.最后,上述所揭露的各实施例中,并非用以限定本发明,任何熟悉此技艺者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰,皆可被保护于本发明中。因此本发明的保护范围当视所附的权利要求书所界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。