1.本发明涉及一种用于对坐在座位上或者坐在或躺在躺椅或支承器具上的人的盆骨进行位置和姿态确定的方法。
背景技术:
2.人的盆骨被视为用于对机能性的脊柱和下肢进行中性定向的位置调节器。尽管盆骨在长度和角度关系方面具有特定于年龄和性别的差异,但是仍可以进行对于盆骨的由姿态决定的负荷的普遍有效的、统一的描述。在座椅系统中,通常由座椅系统的座面和靠背支撑人的盆骨。在此,坐骨结节用于承接上身重力和下肢的份额并且可以在人处于人体工程学上正确的基本上竖直的坐立位置的情况下承接高的坐立压力,而尾骨和骶骨在该竖直的坐立位置中基本上保持不受负荷。在卧躺系统中在人处于人体工程学正确的水平的仰卧姿态中,脊柱和骶骨支撑上身重力,其中,由人的重力施加的接触压力在盆骨区域中在骶骨处为基本上最高而尾骨基本上保持不受负荷。在人体工程学正确的俯卧姿态中,人的耻骨承担在盆骨区域中的身体区段重量的最高份额。
3.然而,人通常在站立、坐立和卧躺中未意识到其自己的个体化的身体姿势并且占据如下位置,这些位置导致在一侧的疼痛的肌肉挛缩,并且长期在脊柱和盆腔结构错误负荷的情况下特别是在其过渡区域中、如骶髂关节中可能导致磨损过程,即椎间盘突出症或者至少导致特别是脊柱的挤压和扭伤。特别长久的坐立通常在错误姿势中并且在没有足够的平衡运动的情况下需要肌肉组织的持久的静态工作,由此招致肌肉的平衡不良并且加剧多方面的身体疼痛,也在四肢中的疼痛。
4.由现有技术已知大量手段和方法,这些手段和方法引起建立并且不间断地保持人体工程学正确的身体姿势。例如,de 10 2012 017 681 a1、us 2002/0193707 a1和ep 1 093 755 a1示出用于测量人在坐立中或在躺卧中的接触压力的方法和设备。然而利用这样的方法或设备不能实施人的盆骨的姿态和位置确定。
5.例如,在本专利申请的时间点尚未公开的专利申请a 50386/2019公开了一种用于利用定位元件和传感器对人进行身体定位的设备,这些定位元件和传感器设置在座位元件上和靠背元件上。在该专利申请中提到人在从竖直转变到水平的卧躺位置中的滚动过程,其中,通过直线的调整运动通过围绕矢状、水平和纵向轴线来定位人的盆骨。
6.在专利申请a 50386/2019中,仅间接地并且不充足地确定盆骨的姿态,因为只要达到预定的坐立和/或接触压力差,人的盆骨就已经定位。此外该设备不探测混合的运动,亦即围绕人的至少两条身体轴线同时进行的运动,而是单单仅围绕矢状、水平和纵向轴线的运动。然而,为了实现将人符合人体工程学地定位在座椅或卧躺系统上,必需精确地确定在人在座椅或卧躺系统上的每个位置中的盆骨的姿态。
技术实现要素:
7.因此,本发明的任务在于,提供一种用于对人的盆骨进行位置和姿态确定的方法
和设备,其能集成到已经存在的座椅系统或卧躺系统或支承器具并且避免现有技术的缺点。
8.本发明通过提供一种根据权利要求1所述的用于对人的盆骨进行姿态和位置确定的方法和一种具有权利要求8的特征的用于对人的盆骨进行姿态和位置确定的设备来完成所提出的任务。
9.在另一个方面中,本发明提供一种根据权利要求6所述的计算机程序产品和一种计算机可读的数据载体,所述计算机程序产品存储在所述数据载体上。
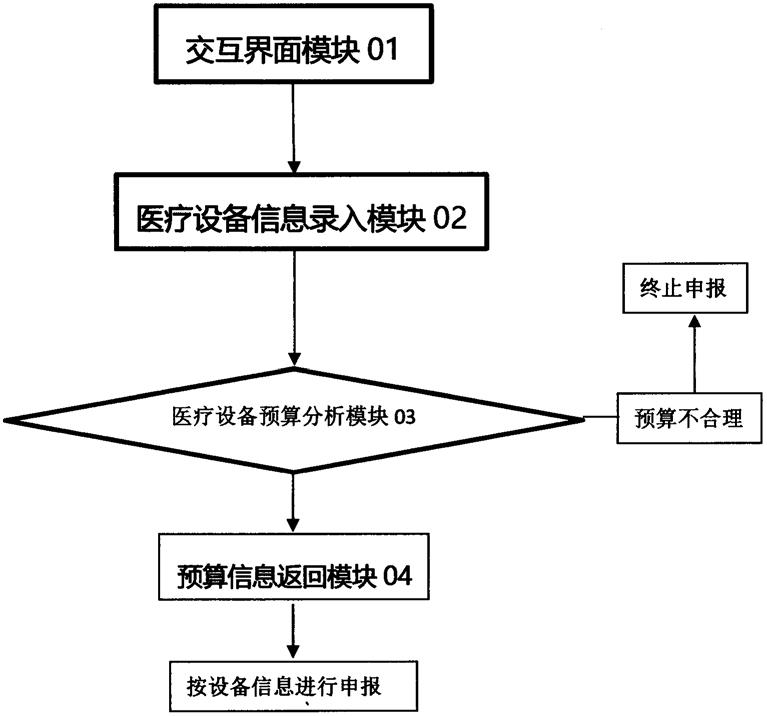
10.根据本发明的方法包括以下步骤:通过设置在座位、躺椅或支承器具上的表面传感器探测由基本上竖直坐立的人的坐骨结节和尾骨或者处于俯卧姿态中的人的髂骨嵴和耻骨施加到座位、躺椅或支承器具上的坐立压力/接触压力;通过计算单元确定表面传感器上达到由人的第一坐骨结节/髂骨嵴施加的第一峰值坐立压力/峰值接触压力的第一位置;通过计算单元确定表面传感器上达到由人的第二坐骨结节/髂骨嵴施加的第二峰值坐立压力/峰值接触压力的第二位置,其中,所述第二位置处于相对于第一位置的预确定的距离范围内;通过计算单元确定第一位置与第二位置之间的距离;通过计算单元确定表面传感器上达到由人的尾骨/耻骨施加的第三峰值坐立压力/峰值接触压力的第三位置,其中,所述第三位置处于第一位置与第二位置之间,并且所述第三位置基本上处于它们的共同的连接线上或者处于基本上垂直于连接线延伸的线上的预确定的距离范围内;通过计算单元限制表面传感器的探测坐立压力和接触压力的区域;并且通过计算单元评估人的盆骨在所限制的探测坐立压力和接触压力的区域中的坐立压力和接触压力。
11.通过根据本发明的方法可能的是,在任何时间确定在座位或躺椅上的人的盆骨的姿态和位置,由此不仅能够探测人围绕其身体轴线的各个运动,而且特别是也探测开头提到的类型的混合运动。为此,确定人的盆骨施加到表面传感器上的坐立压力和接触压力的上述三种位置和大小。这优选地通过由计算单元对坐立压力和接触压力的最高值的模式识别实施。有利的是,可以通过坐立压力和接触压力的最高值推断上身的重力,并且根据座位是否实施有扶手来计入/排除人的上肢的重力,因为在基本上竖直的坐立位置中,坐骨结节将上身重量的大部分传递到表面传感器上。在该坐立位置中由人的下肢传递到表面传感器上并且以在坐立压力和接触压力中以偏差形式可注意到的较小的重力份额可以通过计算单元基于所限制的进行探测的区域来补偿。在表面传感器在座位的靠背元件上的布置结构、特别是对于靠背元件的向后倾斜的位置,可以附加地由表面传感器动态地探测由人的呼吸引起的压力波动。由此可以探测在呼吸中的变化、例如呼吸急促。
12.因为盆骨、尾骨和骶骨的坐立压力和接触压力仅在探测坐立压力和接触压力的区域中被检测到,包含下述优势,即对表面传感器的其他区域施加的压力不影响由人的盆骨施加到表面传感器上的坐立压力和接触压力。如果所述设备例如用在病床中,则位于病床上的物体,例如访客的包、护理人员或医生的仪器不影响对位于病床上的病人的盆骨的坐立压力和接触压力的评估,因为所述评估基本上考虑盆骨的几何结构并且支撑在靠背上的脊柱的部分固定的错误姿势也保持不受影响。因此,对于人在表面传感器上的任意位置可以精确地确定盆骨的姿态和位置。
13.另一个优势在于,通过根据本发明的方法可以与由姿态决定的重力影响无关地并且与人的上身重量在靠背元件上的支撑无关地确定在座位元件、特别是其座面与靠背元件
之间的相对角度。这通过如下方式实现,即,通过计算单元能给每个在表面传感器的探测坐立压力和接触压力的区域中出现的坐立压力和接触压力分配一个位置,并且因此已知对于坐立压力和接触压力的每个位置的压力分布。
14.为了能够限制表面传感器的检测坐立压力和接触压力的区域,所述计算单元执行迭代算法,所述迭代算法借助于递归序列迭代算法,所述迭代算法借助于递归序列以初始条件z0=0描绘曼德尔布罗特集(mandelbrot set)。为此,所述表面传感器被理解为高斯平面,在所述高斯平面中,由人的盆骨施加的坐立压力和接触压力点c处于高斯平面中。通过将不同点c插入到递归序列中,可以找出,高斯平面的哪些点c属于曼德尔布罗特集而哪些点不属于。在此,曼德尔布罗特集包含如下点,所述序列对于这些点保持受约束、即收敛,亦即越来越接近极限值。对于在高斯数平面中具有坐标c(0/0)的点c产生探测坐立压力和接触压力的圆形的区域,因为所述序列朝向降低。在该圆形的区域的点c中,数字朝向无穷延伸并且所述序列不再所限制。通过由递归序列描绘曼德尔布罗特集而可能的是,将人的盆骨的三维结构二维地映射在平坦的接触面上、例如在表面传感器上。在此,盆骨的二维的结构基本上相当于心脏线的形状,所述心脏线能通过曼德尔布罗特集表示。盆骨的二维的心脏线的形状通过所述盆骨在平坦的接触面上的滚动过程产生。从盆骨的第一姿态出发,所述第一姿态相当于人的竖直的坐立位置,该人的盆骨围绕水平轴线向前倾斜90
°
到第二姿态中并且接着向后倾斜到第三姿态中。为了达到第三姿态,盆骨关于盆骨的第一姿态围绕水平轴线向后倾斜90
°
或者关于盆骨的第二姿态围绕水平轴线向后倾斜180
°
。第三姿态相当于人的水平的仰卧姿态。从水平的仰卧姿态出发,盆骨在两侧通过髂骨嵴滚动,这相应于盆骨的混合的旋转或者在仰卧位置中围绕纵向轴线的单纯的旋转。由此,在平坦的接触面上连接所有接触点的情况下产生心脏线的形状。心脏线因此相应于人的三维盆骨的外轮廓的二维表示。在此,盆骨的骶骨部结构同样二维地映射在心脏线的内部中。
15.迭代的次数确定探测坐立压力和接触压力的区域的形状和大小和因此曼德尔布罗特集的形状和大小,与所述迭代的次数相关地,由人的盆骨施加到表面传感器上的坐立压力和接触压力出现在该心脏线之内。少量的迭代、例如两次迭代导致较大的探测坐立压力和接触压力的区域,在该情况下导致椭圆形的区域,而大量的迭代产生更所限制的、例如心脏线形的探测坐立压力和接触压力的区域。对于通过现有技术(例如a 50386/2019)已知的手段和方法来定位人的盆骨,较高次数的迭代相对于较低次数更为可取。在五次迭代中已能描绘心脏线形的、所限制的检测坐立压力和接触压力的区域,所述区域对于通过上面提到的手段和方法定位盆骨来说足矣。在达到预定次数的情况下,中断当前持续运行的迭代。所提到次数的迭代例如可以由第三者、例如专业人员、护理人员或医生预定并且在计算单元上调整。然而,迭代的次数主要取决于设备的使用目的。在集成在手术床中的情况下,需要尽可能准确地探测坐立压力和接触压力,因此对此选择更高次数的迭代。
16.上面提到的根据本发明的各步骤通过一种计算机程序产品,所述计算机程序产品包括指令,所述指令在通过计算单元执行程序时引起所述计算单元执行这些步骤。在此,所述计算机程序产品存储在计算机可读的数据载体上。
17.利用程序的支持可以对所述设备进行调整,这些调整允许使所述设备适用于其相应的使用目的,例如关于算法的迭代的次数的上面提到的调整。
18.用于对坐立在座位上或者坐立或躺卧在躺椅或支承器具上的人的盆骨进行位置和姿态确定的设备包括计算单元和与计算单元连接的表面传感器。所述表面传感器设置在座位、躺椅或支承器具上并且被设计用于探测坐立压力和接触压力,所述坐立压力和接触压力由人的盆骨、尾骨和骶骨施加到表面传感器上,其中,所述计算单元被设计用于执行上面提到的根据本发明的方法的各步骤。
19.有利的是,所述设备集成到存在的座位或躺椅中或者能用作在椅子或床上的坐立支承器具。在此产生大量应用可能性,其中,所述设备不局限于以下示例。说明示例地,所述设备可以集成到以下设施中:集成到办公椅、轮椅、车辆座椅、儿童约束系统、训练仪器、处置躺椅、床垫中和/或使用在康复和治疗区域、特别是站立床(stehbett)、站立板(stehbretter)和/或手术床中。本发明在手术床中的集成特别是对于在俯卧姿态中或在仰卧姿态中实施手术是有意义的,因为这些手术通常利用倾斜的手术床实施并且由此可能发生位于手术床上的人的不希望的移位或者说导致盆骨关于脊柱的中性定位的错位定位,其中,脊柱、特别是在腰区域中强制于压缩或伸长的姿态中。在这样定位盆骨的情况下的手术可能导致大量问题。借助于本发明可以通过在表面传感器上探测特别是最高的坐立压力和接触压力的移动迅速地识别人的盆骨的移动或旋转。通过现有技术已知的手段和方法、例如通过开头引用的设备可以抵抗盆骨的移动或旋转并且再次建立盆骨的原始位置。在手术的过程中因此可以以尽可能最佳的精确度实施手术并且最小化或甚至排除可能的手术风险或者机能性的脊柱的错误定位的疼痛结果,特别是通过腰脊柱的协调盆骨位置的支撑。
20.在本发明的一种优选的实施形式中,所述表面传感器是传感器的阵列,这些传感器从包括机械式、电气式、气动式或液压式传感器的组选择。由此,能探测盆骨在人在座位或躺椅上的每个位置中的位置。通过改变传感器的数量可以影响通过传感器探测坐立压力和接触压力的准确性。大量传感器能实现人的盆骨的坐立压力和接触压力的精确探测。
21.在本发明的一种优选的实施形式中,所述表面传感器形状为使得所述表面传感器至少部分地适合人的盆骨。由此,坐立压力和接触压力可以以更高的灵敏性来探测,由此已可以由各个传感器探测轻微的重心移动、特别是在盆腔身体区段的区域中。
附图说明
22.现在参考附图借助非限制性的实施例更详细地阐述本发明。
23.图1示出一个框图,所述框图按一种优选的次序示出根据本发明的权利要求1所述的方法的各步骤。
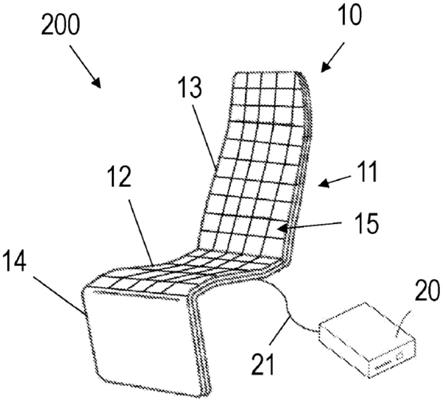
24.图2示出根据本发明的权利要求8所述的具有集成的表面传感器的座位的示意性透视图。
25.图3示出在图1中图示的座位的座面的示意图,在所述座位中示出根据本发明的权利要求1所述的第一位置、第二位置和第三位置。
26.图4示出表面传感器的探测坐立压力和接触压力的区域。
具体实施方式
27.以下参考图1至图3。首先参照图2,该附图示出根据本发明的用于对坐立在座位10上的或者坐立或躺卧在躺椅或支承器具上的人进行位置和姿态确定的设备200。在各附图
中示出躺椅、支承器具和人。设备200包括计算单元20和与计算单元20连接的表面传感器11。表面传感器11设置在座位10的座位元件12上和靠背元件13中、特别是集成在所述座位中,其中,座位10的腿部元件14不具有表面传感器11。在另一个未示出的实施形式中,附加于座位元件12和靠背元件13,腿部元件14也可以具有表面传感器11。在又一个同样未示出的实施形式,仅座位元件12或靠背元件13可以具有表面传感器11。提到的各实施形式可结合,亦即例如腿部元件14和座位元件12具有表面传感器11而靠背元件13不具有表面传感器11。在图2中示例性示出的表面传感器11具有多个相对大面积的单个传感器,由此距离的确定仅能够相对粗略地进行。与本发明相关联地使用的表面传感器因此也可以具有比在图2中所示以更精细的栅格或阵列布置的更多个单个传感器。
28.为了达到传感器15的高的灵敏性,表面传感器11这样成形,使得该表面传感器至少部分地适合人的盆骨。为此,被设计用于探测由人的盆骨、尾骨和骶骨施加到表面传感器11上的坐立压力和接触压力的表面传感器11可以以高精度探测坐立压力和接触压力。如在图2中可看出的,表面传感器11是传感器15的阵列,这些传感器从包括机械式、电气式、气动式或液压式传感器的组中选择。特别是,表面传感器是多个传感器15的二维阵列,该阵列完全占据座位10的座位元件12和靠背元件14。在所述阵列中设置的传感器15的数量可以变化并且不局限于确定的数量。在图3中示出一个具有5x5传感器15的阵列。为此,由人的盆骨、尾骨和骶骨施加的坐立压力和接触压力的位置和因此人的盆骨的每个位置可以足够精确地确定。表面传感器11的传感器15优选被设计平坦的腔室,这些腔室填充有流体、例如空气或水。在此,表面传感器11与计算单元20经由在附图中未示出的导通流体的通道连接。为了探测坐立压力和接触压力,也可以使用电气式或机械式传感器,并且因此不局限于在前示例性提及的传感器。因此,所述传感器15也可以是可按阵列设置的应变计。在此,计算单元20与表面传感器11电气连接。
29.以下参照图1和3。在图1中示出一个框图,所述框图示出根据本发明的对坐立在座位10上或者坐立或躺卧在躺椅或支承器具上的人的盆骨进行位置和姿态确定的方法100的各步骤101、102、103、104、105、106、107。在所述方法100的第一步骤101中,通过设置在座位10、躺椅或支承器具上的表面传感器11探测由基本上竖直坐立的人的坐骨结节和尾骨或者处于俯卧姿态中的人的髂骨嵴和耻骨施加到座位10、躺椅或支承器具上的坐立压力/接触压力。在下一个步骤102中,通过计算单元20确定在表面传感器11上的第一位置p1,在所述第一位置中达到由人的第一坐骨结节/髂骨嵴施加的第一峰值坐立压力/峰值接触压力。第一位置p1示例性地在图3中由传感器在阵列的行2和列2探测到。在下一个步骤103中,通过计算单元20确定在表面传感器11上的第二位置p2,在所述第二位置中达到由人的第二坐骨结节/髂骨嵴施加的第二峰值坐立压力/峰值接触压力,其中,所述第二位置p2处于相对于第一位置p1的预确定的距离范围a内。第二位置p2在图3中由传感器在阵列的行4和列4探测到。预确定的距离范围a通过人的坐骨结节或髂骨嵴的几何布置结构给出并且对于坐骨结节为100mm至150mm而在俯卧姿态中对于髂骨嵴为200mm至250mm。所述列举的距离范围a视为示例性的,因为除了性别特定的差异,其他大小、如年龄或特别是在人的尾骨的区域中的病理学改变也对盆骨或者说骶骨部结构的几何结构有影响并且因此对距离范围a有影响。在方法100的接下来的步骤104中,通过计算单元20确定在第一位置p1与第二位置p2之间的距离b。该距离b在此等于人的第一坐骨结节/髂骨嵴与第二坐骨结节/髂骨嵴之间的真实距
离,其中,在各髂骨嵴之间的距离b比在各坐骨结节之间更大。术语“真实距离”应理解为在各坐骨结节或者髂骨嵴之间的符合人的相应盆骨的实际距离,该距离由表面传感器11探测。
30.如果第一位置p1、第二位置p2和在这些位置p1、p2之间的距离b通过计算单元20确定好,则通过计算单元20接着确定在表面传感器11上的第三位置p3,在所述第三位置中达到由人的尾骨/耻骨施加的第三峰值坐立压力/峰值接触压力。在此,所述第三位置p3处于第一位置p1与第二位置p2之间,其中,所述第三位置p3基本上处于第一位置和第二位置的共同的连接线c上或者处于基本上垂直于连接线c延伸的线d上的预确定的距离范围内。所述第三位置p3在图3中通过传感器在阵列的行3和列3中探测到。
31.在确定第三位置p3之后,在下一个步骤106中,通过计算单元20确定探测所限制的坐立压力和接触压力的区域e,其中,该区域在图3示意性地示出,而在图4中以曼德尔布罗特集30的形式示出。为了限制探测坐立压力和接触压力的区域e,计算单元20执行迭代算法,所述迭代算法描绘所提到的曼德尔布罗特集30。
32.在方法100的最后步骤107中,通过计算单元20评估人的盆骨在所限制的探测坐立压力和接触压力的区域e中的坐立压力和接触压力。由计算单元20不再评估处于该区域e之外的坐立压力和接触压力。
33.在此,设备100的计算单元20被设计用于执行上面描述的方法200的步骤101、102、103、104、105、106、107,其中,方法100的次序不限于在图1中示出的次序。因此,方法100的步骤102、103例如也可以以相反的次序发生。
34.以下参照图4。图4以不同形状和大小示出探测所限制的坐立压力和接触压力的区域e或者曼德尔布罗特集30。图4此外示出在探测所限制的坐立压力和接触压力的区域e中出现的并且由盆骨和尾骨或骶骨施加到表面传感器11上的坐立压力和接触压力37、38、39借助于表面传感器能确定盆骨的位置和进一步地也能确定盆骨的姿态。如已经提到的,探测坐立压力和接触压力的区域e通过前面提到的迭代算法限制。出于图示的原因,列举:算法的第一迭代31,其形成探测坐立压力和接触压力的圆形的区域e;第二迭代32,其形成探测坐立压力和接触压力的椭圆形的区域e;和第三迭代33。如在图4可看出,利用越来越多的迭代越来越限制探测坐立压力和接触压力的区域e,其中,在第五迭代34中探测坐立压力和接触压力的区域e基本上已具有心脏线的形状或者说曼德尔布罗特集30的形状。根据盆腔结构的垂直的坐标系,在横坐标上绘出在-2至0的区域中的矢状轴线和在0至2的区域中的纵向轴线,而在纵坐标上绘出人的盆骨的水平轴线。以纵坐标和横坐标的交叉点中示出的原点35示出具有骶骨部结构的负荷的稳定的平衡姿态并且与曼德尔布罗特集30的边缘41间隔开距离g。原点35相应于人的身体区段重量重心并且在集成表面传感器11的情况下代表人的水平的仰卧姿态,或者具有最高接触压力的点通过骶骨施加,只要人的上身的纵向轴线或者额状面具有与支撑结构(例如在附图中未示出的站立床)平行的定向。
35.在盆骨的滚动过程、亦即盆骨围绕水平轴线旋转期间,从人的竖直的坐立位置出发,在表面传感器11上,首先坐骨结节将峰值坐立压力37、38施加到表面传感器11上。峰值坐立压力37、38在此相互间处于前面提到的距离a中并且出现在所限制的探测坐立压力和接触压力的区域e之外。在坐骨结节的不对称的负荷的情况下,由表面传感器11可以探测在峰值坐立压力37、38之间的压力差异。通过所述压力差异可以通过计算单元20确定盆骨围
绕人的矢状轴线的旋转角度,由此能确定坐骨结节的真实长度,在俯卧姿态的情况下确定髂骨嵴的真实长度,并且由此能通过计算单元20确定算法的第一迭代31的探测坐立压力和接触压力的圆形的区域e的半径。在盆骨倾斜的情况下,从围绕水平轴线基本上10
°
起,与基础结构的挠性和尾骨的轻微病理形改变有关地,人的尾骨将坐立压力39施加到表面传感器11上,所述坐立压力基本上处于由峰值坐立压力37、38形成的共同的连接线c上。在此,坐立压力39可以具有相对于峰值坐立压力37、38的距离f。峰值坐立压力37、38的距离范围a在盆骨的该姿态中相当于算法的第一迭代31的探测坐立压力和接触压力的圆形的区域e的半个半径。
36.由尾骨施加到表面传感器11上的坐立压力在滚动过程期间增加,直至过渡部,在所述过渡部中人的骶骨将接触压力施加到表面传感器11上。在人的水平的仰卧位置、亦即盆骨的姿态围绕水平轴线倾斜90
°
,由骶骨施加的接触压力在原点35中最高。由人的水平的仰卧位置出发,在该人朝向侧面运动时、亦即人的盆骨在混合运动中侧向滚动或者围绕纵向轴线旋转,从而占据侧卧姿态,所述盆骨将接触压力施加到表面传感器11上。所述接触压力在图4中通过线36表示,所述线示出人朝向侧面的混合运动30
°
。如果位于水平的仰卧位置中的人在混合运动中旋转180
°
,则探测坐立压力和接触压力的区域仅探测如下坐立压力和接触压力,所述坐立压力和接触压力出现在该旋转的第一90
°
之内、亦即在第一迭代31的探测坐立压力和接触压力的圆形的区域e之内。在表面传感器11上出现的坐立压力和接触压力超出于该90
°
旋转并且因此超出于第一迭代31的探测坐立压力和接触压力的圆形的区域e,则所述坐立压力和接触压力将不由该区域探测。然而为了探测人的这种运动,计算单元20被设计用于存储探测坐立压力和接触压力的区域e。如果由盆骨施加的坐立压力和接触压力出现在第一迭代31的探测坐立压力和接触压力的圆形的区域e的边缘区域上,则在附图中未示出的探测坐立压力和接触压力的第二区域邻接于探测坐立压力和接触压力的区域e地描绘。探测坐立压力和接触压力的第二区域在此是探测坐立压力和接触压力的区域e的拷贝。该过程可以通过计算单元多次重复,从而能对于人的每个运动探测在探测坐立压力和接触压力的区域e之外的运动或者由盆骨施加的坐立压力和接触压力。
37.在盆骨在围绕纵向轴线的运动中进一步侧向滚动或者混合运动、亦即人占据水平的俯卧姿态的情况下,仅盆腔结构受负荷。耻骨和髂骨嵴可以将最高的接触压力施加到表面传感器11上。所述接触压力在数学上与位于仰卧姿态中的人的接触压力相等,其中,在仰卧姿态中骶骨部结构受负荷并且在俯卧姿态中盆腔结构受负荷。在水平的仰卧姿态中骶骨的最高负荷处于原点35中而在水平的俯卧位置中耻骨的最高负荷处于过渡部40的区域中的情况下,达到稳定的平衡姿态。
38.距离f和g基本上相同大,其中,所述距离例如由于人在尾骨的区域中的解剖结构的病理性改变而可能有差异。在距离f和g不相等并且知晓其他在附图中未示出的特征点或压力区域的情况下,所述距离f可以在计算中校正并且尽管如此还是准确推断处人体工程学正确的或错误的坐立或仰卧位置。
39.要提及,即使传感器的灵敏性例如出于成本原因减少到非常窄的区域并且因此由传感器不探测最高压力值或仅探测最高压力值,则根据本发明的方法也提供数学上准确的结果。
40.还要提及,所述表面传感器也可以仅直接在坐骨结节和尾骨/骶骨的接触区域中
集成到座面中。这点是可能的,因为对于计算方法从可评估的参数出发仅考虑于此相关的几何固定点来评价盆骨姿态,但这些固定点不必在物理上实际存在。这例如为了针对纯座椅系统确定姿态是令人感兴趣的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。