技术特征:
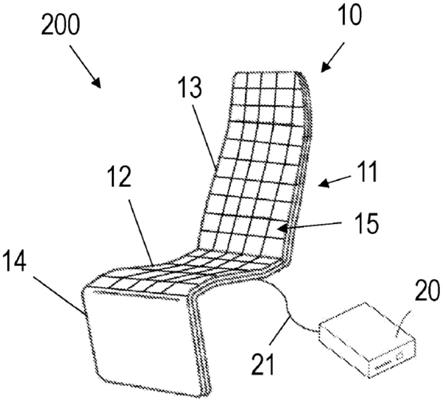
1.一种用于对坐在座位(10)上或者坐在或躺在躺椅或支承器具上的人的盆骨进行位置和姿态确定的方法(100),其特征在于,所述方法(100)包括以下步骤:a)通过设置在座位(10)、躺椅或支承器具上的表面传感器(11)探测由基本上竖直坐立的人的坐骨结节和尾骨或者处于俯卧姿态中的人的髂骨嵴和耻骨施加到座位(10)、躺椅或支承器具上的坐立压力/接触压力;b)通过计算单元(20)确定表面传感器(11)上达到由人的第一坐骨结节/髂骨嵴施加的第一峰值坐立压力/峰值接触压力的第一位置(p1);c)通过计算单元(20)确定表面传感器(11)上达到由人的第二坐骨结节/髂骨嵴施加的第二峰值坐立压力/峰值接触压力的第二位置(p2),其中,第二位置(p2)处于相对于第一位置(p1)的预确定的距离范围a内;d)通过计算单元(20)确定第一位置(p1)与第二位置(p2)之间的距离b;e)通过计算单元(20)确定表面传感器(11)上达到由人的尾骨/耻骨施加的第三峰值坐立压力/峰值接触压力的第三位置(p3),其中,第三位置(p3)处于第一位置(p1)与第二位置(p2)之间,并且第三位置(p3)基本上处于它们的共同连接线(c)上或者处于基本上垂直于连接线(c)延伸的线(d)上的预确定的距离范围内;f)通过计算单元(20)限制表面传感器(11)的探测坐立压力和接触压力的区域(e);并且g)通过计算单元(20)评估在所限制的探测坐立压力和接触压力的区域(e)中人的盆骨的坐立压力和接触压力。2.根据权利要求1所述的方法(100),其特征在于,为了窄化探测坐立压力和接触压力的区域(e),计算单元(20)执行迭代算法,所述迭代算法描绘曼德尔布罗特集(30)。3.根据权利要求2所述的方法(100),其特征在于,所述迭代在达到预定的次数时中断。4.根据权利要求3所述的方法(100),其特征在于,所述表面传感器(11)的所限制的探测坐立压力和接触压力的区域(e)的形状和大小与迭代的次数有关。5.根据上述权利要求之一所述的方法(100),其特征在于,为了确定第一位置(p1)、第二位置(p2)和第三位置(p3),通过计算单元(20)实施坐立压力和接触压力的最高值的模式识别。6.一种计算机程序产品,包括指令,当计算单元(20)执行程序时,所述指令引起计算单元(20)执行根据权利要求1所述的方法(100)的各步骤。7.一种计算机可读的数据载体,在所述数据载体上存储有根据权利要求6所述的计算机程序产品。8.一种用于对坐在座位(10)上或者坐在或躺在躺椅或支承器具上的人的盆骨进行位置和姿态确定的设备(200),所述设备(200)包括计算单元(20)和表面传感器(11),所述表面传感器与计算单元(20)连接并且设置在座位(10)、躺椅或支承器具上并且被设计为用于探测由人的盆骨施加到表面传感器(11)上的坐立压力和接触压力,其中,所述计算单元(20)被设计用于执行根据权利要求1所述的方法(100)的各步骤。9.根据权利要求8所述的设备(200),其特征在于,所述表面传感器(11)是从包括机械式、电气式、气动式或液压式传感器的组选择的传感器(15)的阵列。10.根据权利要求8或9所述的设备(200),其特征在于,所述表面传感器(11)形状为使
得所述表面传感器(11)至少部分地适合人的盆骨。
技术总结
本发明涉及一种用于对人的盆骨进行位置和姿态确定的方法(100),所述方法包括以下步骤:a)通过表面传感器(11)探测由坐立的人的坐骨结节和尾骨或者躺卧的人的髂骨嵴和耻骨施加到座位、躺椅或支承器具上的坐立压力/接触压力;b)通过计算单元(20)确定表面传感器上达到第一峰值坐立压力/峰值接触压力的第一位置(P1);c)确定表面传感器上达到第二峰值坐立压力/峰值接触压力的第二位置(P2);d)确定第一位置与第二位置之间的距离B;e)确定表面传感器上达到第三峰值坐立压力/峰值接触压力的第三位置(P3),所述第三位置处于第一位置与第二位置之间;f)限制表面传感器(11)的探测坐立压力和接触压力的区域;g)评估在所限制的探测坐立压力和接触压力的区域中的坐立压力和接触压力。压力。压力。
技术研发人员:C
受保护的技术使用者:桑拉斯控股有限公司
技术研发日:2020.09.24
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。