1.本发明涉及一种船坞,尤其涉及一种可以在满水状态下调整坞墩的船坞,属于船舶及海洋工程制造领域。
背景技术:
2.船坞是修造船用的坞式建筑物,灌水后可容船舶进出,排水后能在干底上修造船舶。坞墩是在船坞中固定船舶的大型工装。
3.在修船的过程中,船坞内船舶更替的时候。一般工序为:船舶修理完毕后打开坞门对船坞注水,将修理完毕都得船舶浮起释放坞墩,利用拖轮将修好的船舶拖出船坞并关上坞门,将船坞内的水排出坞外。在船坞内水被排空后,按照下一艘需修理的船舶规格要求对坞墩进行重新摆放,摆放完成后对船坞进行注水,使需要修理的船舶进入船坞并放置在坞墩上,再次对船坞进行排水;待水排空后,对这艘船舶进行修理。船坞中船舶更替过程中整个工序比较复杂,为了调整坞墩需要连续两次对船坞注水和排水,增加工序并浪费大量时间,造成整个工序的延长,成本增加。
技术实现要素:
4.本发明所要解决的技术问题是船坞中船舶更替过程中减少注水和排水的次数,缩减整个工序流程,节省时间和成本。
5.为了解决上述技术问题,本方案的可水下调整坞墩的船坞,包括船坞本体和坞墩,所述船坞本体内设置有水下机器人和坞墩,所述水下机器人通过电信号与中控信息处理装置连接。
6.上述技术方案中,所述水下机器人通过脐带缆连接电源及中控信息处理装置。
7.上述技术方案中,所述船坞侧壁设置有扫描装置,所述坞墩上设置有定位装置,所述扫描装置和定位装置通过电信号与中控信息处理装置连接。
8.上述技术方案中,所述水下机器人设置有抓取装置,所述抓取装置为货叉,所述坞墩上设置有插口。
9.上述技术方案中,所述水下机器人设置有电池舱。
10.上述技术方案中,所述水下机器人设置有照明装置和水下摄像装置。
11.上述技术方案中,所述水下机器人设置有声纳扫描装置。
12.上述技术方案中,所述水下机器人设置有信号收发装置,所述信号收发装置通过电信号连接中控信息处理装置连接。
13.上述技术方案中,所述坞墩设置有定位装置,所述定位装置通过电信号与中控信息处理装置连接。
14.上述技术方案中,所述船坞侧壁设置有无线信号收发装置。
15.本方案实施的可水下调整坞墩的船坞具有如下优点。
16.1.采用了水下机器人移动坞墩,,减少了人工干预。
17.2.采用水下作业,可以减少船坞注水排水时间,为短平快的修船项目节约时间。
18.3.采用机器代替工人,减少了配合人员,降低人员安全风险。
19.4.可在摆放坞墩前进行计算机模拟摆放,减少摆放过程中的错误风险,减少重复工作。
20.5.采用扫描装置扫描船坞地形及水下状况,可以更清楚的了解船坞内部情况。
21.6.采用灯光加摄像头,可以实现实时观察船坞水下动态。
22.7.坞墩添加定位系统可以准确的了解水下坞墩的摆放位置。
23.8.机器人带声呐装置可以在水质较差的状况下清楚的了解水下状况。
附图说明
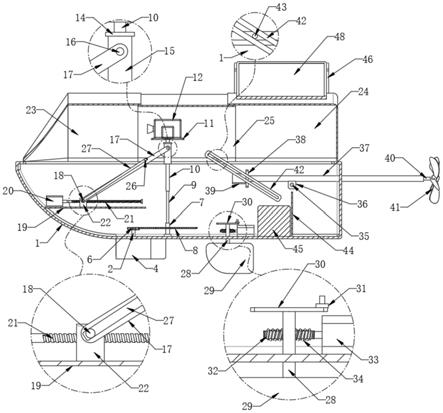
24.图1本方案中船坞整体布局示意图。
25.图2为水下机器人结构示意图。
26.图3为坞墩结构示意图。
27.图4为系统信号传输示意图。
具体实施方式
28.参见图1至4,本方案的可水下调整坞墩的船坞一种实施方式,包括船坞本体3,船坞本体3内部设置有水下机器人1和多个坞墩2,所述水下机器人1为履带式或轮式小车。
29.所述水下机器人1尾部顶端设有与岸上中控信息处理装置14及供电设施连接的脐带缆4,水下机器人1可以通过脐带缆4将水下数据传输给中控信息处理装置14。
30.所述水下机器人1首部设有坞墩抓取装置5,坞墩抓取装置5具体实施可采用货叉,坞墩2上匹配有插口5,货叉插入插口5带动坞墩2进行移动。所述水下机器人1可以通过坞墩抓取装置5拖动坞墩2到船坞本体3内指定的位置。
31.所述水下机器人1尾部设有电池舱6,通常情况下所述水下机器人1动力由岸边配套设施通过脐带缆4提供,应急情况下水下机器人1的动力由电池舱6提供。
32.所述水下机器人1首部顶端设有水下照明装置7以及水下摄像装置8,便于操作人员通过中控信息处理装置14检测船坞内的水下状况。
33.所述水下机器人1首部设有声呐扫描装置10,可以检测污浊的水下状况,根据实际情况反馈信号给中控装置14,便于随时掌握水下情况。
34.所述坞墩2设有信号定位装置11,信号定位装置11可以将坞墩位置信号发射到无线信号收发装置13,并回传到中控信息处理装置14。
35.所述船坞本体3侧壁上设有多个扫描装置12和无线信号收发装置13,所述扫描装置12通过电信号连接无线信号收发装置13,所述无线信号收发装置13通过电信号连接中控信息处理装置14。
36.所述水下机器人1顶端中部设有信号收发装置9,信号收发装置9将数据传输给无线信号收发装置13,信号由无线信号收发装置13传递给中控信息处理装置14。
37.所述中控信息处理装置14可以通过脐带缆4指挥水下机器人1拖动坞墩2,也可以由无线信号收发装置13传递给信号收发装置9通过无线信号指挥水下机器人1拖动坞墩2。
38.水下摄像装置8和声呐扫描装置10也可以通过电信号连接无线信号收发装置13。
39.下面以船a修理完毕,船b准备进船坞的情况对操作过程进行描述。
40.1.对所有坞墩2进行分类编号,输入坞墩2的定制装置11,放置在船坞本体3内特定位置。
41.2.通过坞墩2的定位装置11将各种规格坞墩的位置以及编号信息输入中控信息处理装置14。
42.3.通过船坞本体3两侧的扫描装置12对船坞内部状况进行扫描。船坞内状况通过船坞侧壁的无线信号收发装置13录入中控信息处理装置14。
43.4.设定水下机器人1的维护位置,即水下机器人的工作起始点。
44.5.将船b的坞墩布置图输入中控信息处理装置14,中控信息处理装置14对船坞本体3内坞墩2位置和船b的坞墩布置图坞墩位置进行对比,按照对比结果设置水下机器人1拖放坞墩的路线。
45.6.船坞注水,船a行驶出船坞本体3后,水下机器人1通过脐带缆4接收电力和中控信息处理装置14的命令,按照预定路线行驶到坞墩2所在位置,通过抓取装置5拖动坞墩2到指定位置。
46.7.在坞墩2拖放完成后,通过扫描装置12扫描船坞本体3内坞墩2布置情况并通过船坞侧壁的无线信号收发装置13传回中控信息处理装置14。
47.8.中控信息处理装置14收到船坞本体3内坞墩2布置图后,将扫描的坞墩2布置图与船b的坞墩布置图进行对比.对比布置无误后通知相关人员操纵船b可以驶入船坞。
技术特征:
1.可水下调整坞墩的船坞,包括船坞本体和坞墩,其特征在于:所述船坞本体内设置有水下机器人和坞墩,所述水下机器人通过电信号与中控信息处理装置连接。2.如权利要求1所述的可水下调整坞墩的船坞,其特征在于:所述水下机器人通过脐带缆连接电源及中控信息处理装置。3.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述船坞侧壁设置有扫描装置,所述坞墩上设置有定位装置,所述扫描装置和定位装置通过电信号与中控信息处理装置连接。4.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述水下机器人设置有抓取装置。5.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述水下机器人设置有电池舱。6.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述水下机器人设置有照明装置和水下摄像装置。7.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述水下机器人设置有声纳扫描装置。8.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述水下机器人设置有信号收发装置,所述信号收发装置通过电信号连接中控信息处理装置连接。9.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述坞墩设置有定位装置,所述定位装置通过电信号与中控信息处理装置连接。10.如权利要求1或2所述的可水下调整坞墩的船坞,其特征在于:所述船坞侧壁设置有无线信号收发装置。11.如权利要求4所述的可水下调整坞墩的船坞,其特征在于:所述抓取装置为货叉,所述坞墩上设置有插口。
技术总结
本发明公开了可水下调整坞墩的船坞,包括船坞本体和坞墩,所述船坞本体内设置有水下机器人和坞墩,所述水下机器人通过电信号与中控信息处理装置连接。本方案的船坞可以在船坞内注水的情况下对水下的坞墩进行位置调整,减少船舶交替进入船坞过程中注放水次数,缩减了进坞时间和成本。坞时间和成本。坞时间和成本。
技术研发人员:唐胜波 张经纬 沈小兵 曾小刚 李云山 金爱国
受保护的技术使用者:惠生(南通)重工有限公司
技术研发日:2020.11.26
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。