1.本发明属于救援机器人技术领域,特别是涉及一种水上救援机器人及其使用方法。
背景技术:
2.水上救援是指人员、船只在进行水上活动时受困,需要实施救助的过程,随着社会经济的不断发展,人们的安全意识不断进步,为提高水上活动的安全性,市场上出现了各种救助、防患设施,比如救生船、救生衣、救生圈等等。但是对于一些突发事件,比如有人落水需要救助时,如何快速为落水人员提供救生圈等器材,成为十分关键的问题。目前在水上救援设备技术领域,通常会面对面积巨大的搜救区域,对于较远的水域救援,单靠等待船只到达或距离较远游泳携带救援设备无法快速到达等,这些险情下及时救援很难做到,在这种情况下,无人水上救援机器人可以替代人类实施搜救的工作,增加搜救的效率以及救援成功的可能性。现有的水上救援机器人的同类产品是采用塑料或玻璃钢碳纤作为外壳主体结构的产品,水上救援机器人的两侧的推进器装在塑料或玻璃钢碳纤(浮载)主体上。整体的结构功能有限。
3.经检索申请号为202110225401.7的发明涉及一种u型水上救援机器人是一种充气式双喷u型水上救援机器人。包括u型充气气囊,u型充气气囊的两u型端对称设置有推进器,所述的u型充气气囊与推进器之间为可拆卸连接,其特征在于:u型充气气囊的u型端设置有侧端固定座,所述的侧端固定座呈筒口朝外的筒状,侧端固定座的内侧设置有与遥控接收电连接线相接的电连接公接部,所述的遥控接收电连接线设置于u型充气气囊中;所述的推进器的头部设置有外径与所述的侧端固定座筒内径一致的柱型拆接端,柱型拆接端的下位设置柱型紧锁部,所述的柱型紧锁部与所述的柱型拆接端同轴心布置,柱型紧锁部的外径与所述的侧端固定座的外径一致。
4.上述方案中优化了整体的结构,但是整体结构u形设置只能施救一个人,并且整个救援机器人需要准确的驱动到救援对象旁边,对于远距离的救援施救困难。因此本技术文件提供了一种水上救援机器人,方便快速的驱动到救援对象附近,充气展开,扩大施救范围,增加救援量。
技术实现要素:
5.本发明的目的在于提供一种水上救援机器人及其使用方法,通过在推进器上安装一个浮台,快速推进到救援对象附近,后向两侧的伸缩气囊充气,伸缩气囊膨胀向两侧延展伸出,展开一个扩大的救援平台,方便落水救援对象进行攀附,扩大施救范围,同时增加救援量,方便对落水的群体进行施救,解决了现有的问题。
6.为解决上述技术问题,本发明是通过以下技术方案实现的:
7.本发明为一种水上救援机器,包括推进器;所述推进器包括截面为椭圆形结构的外壳体,且外壳体的前端设置为尖端;所述推进器内部前端设置驱动电机、中部设置驱动涡
轮、后端设置转向器,所述外壳体中部两侧设置进水孔;所述推进器上方设置浮台;所述浮台上表面中部开设设备槽;所述设备槽上密封安装有密封上盖;所述设备槽内安装有气罐、无线控制器、电磁气阀、电源;所述无线控制器、电磁气阀、驱动电机均与电源连接;所述驱动电机、转向器、电磁气阀均与无线控制器连接;所述浮台两侧对称开设两个矩形槽;所述矩形槽内设置伸缩气囊;所述矩形槽端部磁吸配合有侧封盖;所述伸缩气囊的伸缩端与侧封盖内侧壁固定;所述气罐通过气管和电磁气阀与伸缩气囊连接;所述密封上盖包括矩形板以及固定器;所述矩形板表面开设圆通孔;所述固定器固定在圆通孔内壁的下半部;所述固定器上插接固定有连接器。
8.进一步地,所述固定器包括上开口的圆筒、电磁插销;所述圆筒上端固定在圆通孔内壁的下半部;所述圆筒下端固定用于支撑电磁插销的支撑座;所述圆筒周侧面贯穿固定有圆套;所述圆套内部设置有与电磁插销销杆配合的密封胶圈。
9.进一步地,所述连接器包括下开口的导向筒、定位销、拉簧;所述拉簧安装在导向筒内部上端,并且拉簧下端与定位销上端固定连接;所述导向筒周侧面开设沿轴向设置的矩形导向孔;所述定位销与导向筒内壁滑动配合,且定位销周侧面固定两个与矩形导向孔配合的导向杆;所述定位销下端开设与固定器配合的定位孔;导向筒上端开设螺纹盲孔。
10.进一步地,所述连接器上螺纹连接有用于放置救生圈的挂架;所述挂架包括下端为螺纹的半螺纹杆;所述半螺纹杆上端固定横杆;所述横杆上方固定三个竖向设置的限位档杆。
11.进一步地,所述浮台上表面固定四个扶手。
12.进一步地,相邻两个所述密封上盖上的连接器通过螺栓安装用于连接的连接架;所述连接架包括连接横梁;所述连接横梁的两端均固定一个l形板;所述l形板上开设有与螺栓配合的螺纹通孔。
13.进一步地,所述连接横梁上固定多个用于挂载救生圈的挂钩。
14.一种水上救援机器人的使用方法,包括以下步骤:
15.ss01安装救援机器人,在陆地上将连接器与挂架螺纹连接固定,后将连接器插入到密封上盖中,通过电磁插销进行锁止,将救生圈套设到挂架上;
16.ss02下水遥控驶向救援对象,将安装好的救援机器人放到水中,用于遥控装置遥控推进器驶向救援对象,两个伸缩气囊收缩状态,保障救援过程的速度;
17.ss03展开伸缩气囊,救援机器人到达救援对象地点时,遥控电磁气阀向两个伸缩气囊充气,直至伸缩气囊完全伸出,伸出的伸缩气囊扩大了救援对象可攀附的面积,方便对救援对象进行救助;
18.ss04救援对象取下救生圈,救援对象攀附在伸缩气囊上取下挂架上的救生圈套在自己身上,穿上救生圈的救援对象,有效预防从救援机器人上滑落后再次沉水,增加安全性;
19.ss05返航,救援对象身体攀附在伸缩气囊上,握着扶手,岸上救援人员操控救援机器人带着救援对象驶向岸边,返航的救援机器人扩大了展开面积,能够增加单次的救援量。
20.进一步地,步骤ss01安装救援机器人,将两个救援机器人用连接架连接在一起,扩大救援的宽度,增加救援面积。
21.本发明具有以下有益效果:
22.1、本发明通过在推进器上安装一个浮台,快速推进到救援对象附近,后向两侧的伸缩气囊充气,伸缩气囊膨胀向两侧延展伸出,展开一个扩大的救援平台,方便落水救援对象进行攀附,扩大施救范围,同时增加救援量,方便对落水的群体进行施救。
23.2、本发明通过在救援机器人上可选择的安装救生圈连接器与挂架,并挂载救生圈,以便于施救对象进行防护性的自救,提高救援存活率。
24.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
25.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1为本发明一种水上救援机器人的结构示意图。
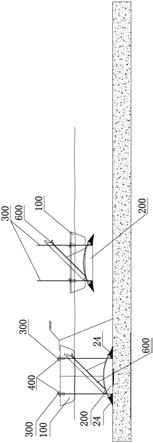
27.图2为本发明伸缩气囊伸出状态的结构示意图。
28.图3为本发明安装连接器、救生圈、挂架的实施状态图。
29.图4为两个救援机器人通过连接架连接时的实施状态图。
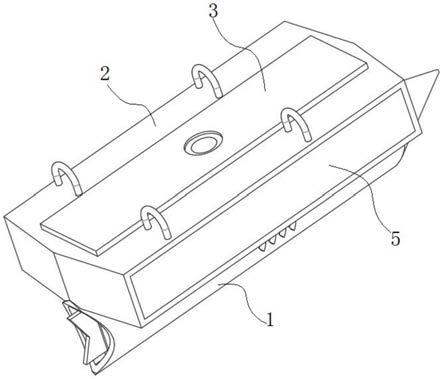
30.图5为推进器、浮台的结构示意图。
31.图6为密封上盖的结构示意图。
32.图7为连接器的结构示意图。
33.图8为挂架的结构示意图。
34.图9为连接架的结构示意图。
35.附图中,各标号所代表的部件列表如下:
36.1-推进器,2-浮台,3-密封上盖,4-伸缩气囊,5-侧封盖,6-连接器,7-救生圈,8-挂架,9-连接架,11-气罐,12-无线控制器,13-电磁气阀,14-电源,21-设备槽,22-矩形槽,23-扶手,31-矩形板,32-固定器,33-圆通孔,321-圆筒,322-电磁插销,323-支撑座,324-圆套,61-导向筒,62-定位销,63-拉簧,64-矩形导向孔,65-导向杆,66-定位孔,67-螺纹盲孔,81-半螺纹杆,82-横杆,83-限位档杆,91-连接横梁,92-l形板,93-螺纹通孔。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
38.请参阅图1-图9所示,本发明为一种水上救援机器人,包括推进器1;推进器1包括截面为椭圆形结构的外壳体,且外壳体的前端设置为尖端;推进器1内部前端设置驱动电机、中部设置驱动涡轮、后端设置转向器,外壳体中部两侧设置进水孔;推进器1上方设置浮台2;浮台2上表面中部开设设备槽21;设备槽21上密封安装有密封上盖3;设备槽21内安装有气罐11、无线控制器12、电磁气阀13、电源14;无线控制器12、电磁气阀13、驱动电机均与电源14连接;驱动电机、转向器、电磁气阀13均与无线控制器12连接;浮台2两侧对称开设两
个矩形槽22;矩形槽22内设置伸缩气囊4;矩形槽22端部磁吸配合有侧封盖5;伸缩气囊4的伸缩端与侧封盖5内侧壁固定;气罐11通过气管和电磁气阀13与伸缩气囊4连接;密封上盖3包括矩形板31以及固定器32;矩形板31表面开设圆通孔33;固定器32固定在圆通孔33内壁的下半部;固定器32上插接固定有连接器6。
39.其中,固定器32包括上开口的圆筒321、电磁插销322;圆筒321上端固定在圆通孔33内壁的下半部;圆筒321下端固定用于支撑电磁插销322的支撑座323;圆筒321周侧面贯穿固定有圆套324;圆套324内部设置有与电磁插销322销杆配合的密封胶圈。
40.其中,连接器6包括下开口的导向筒61、定位销62、拉簧63;拉簧63安装在导向筒61内部上端,并且拉簧63下端与定位销62上端固定连接;导向筒61周侧面开设沿轴向设置的矩形导向孔64;定位销62与导向筒61内壁滑动配合,且定位销62周侧面固定两个与矩形导向孔64配合的导向杆65;定位销62下端开设与固定器32配合的定位孔66;导向筒61上端开设螺纹盲孔67。
41.其中,连接器6上螺纹连接有用于放置救生圈7的挂架8;挂架8包括下端为螺纹的半螺纹杆81;半螺纹杆81上端固定横杆82;横杆82上方固定三个竖向设置的限位档杆83。
42.其中,浮台2上表面固定四个扶手23,给救援对象增加攀附点。
43.其中,相邻两个密封上盖3上的连接器6通过螺栓安装用于连接的连接架9;连接架9包括连接横梁91;连接横梁91的两端均固定一个l形板92;l形板92上开设有与螺栓配合的螺纹通孔93。
44.其中,连接横梁91上固定多个用于挂载救生圈7的挂钩,在扩展救援面积的同时方便救援对象自行施救。
45.一种水上救援机器人的使用方法,包括以下步骤:
46.ss01安装救援机器人,如图3所示,在陆地上将连接器6与挂架8螺纹连接固定,后将连接器6插入到密封上盖3中,通过电磁插销322进行锁止,将救生圈7套设到挂架8上。
47.ss02下水遥控驶向救援对象,将安装好的救援机器人放到水中,用于遥控装置遥控推进器1驶向救援对象,两个伸缩气囊4收缩状态,保障救援过程的速度。
48.ss03展开伸缩气囊4,救援机器人到达救援对象地点时,遥控电磁气阀13向两个伸缩气囊4充气,直至伸缩气囊4完全伸出,伸出的伸缩气囊4扩大了救援对象可攀附的面积,方便对救援对象进行救助。
49.ss04救援对象取下救生圈7,救援对象攀附在伸缩气囊4上取下挂架8上的救生圈7套在自己身上,穿上救生圈7的救援对象,有效预防从救援机器人上滑落后再次沉水,增加安全性。
50.ss05返航,救援对象身体攀附在伸缩气囊4上,握着扶手23,岸上救援人员操控救援机器人带着救援对象驶向岸边,返航的救援机器人扩大了展开面积,能够增加单次的救援量。
51.其中,如图3所示,步骤ss01安装救援机器人,还可以将两个救援机器人用连接架9连接在一起,扩大救援的宽度,增加救援面积。
52.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
53.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。