用于加压系统的监视技术
1.对相关申请的引用
2.本技术要求于2019年10月16日提交的标题为monitoring techniques for pressurized systems的美国专利申请no.16/654,949(代理人案号no.psikp005)的优先权,其全部公开内容通过引用并入本文以用于所有目的。
背景技术:
3.加压系统在广泛的工业应用中用作气体和液体的输送和/或移除系统。加压系统也可以被用于提供能量。例如,蒸汽系统经由热传递提供能量,例如,由锅炉生成的蒸汽通过分配系统流向热交换器,通过该热交换器将蒸汽的热量传递给负载。加压系统通常包括旨在通过降低压力和/或移除不期望的副产品(例如,蒸汽系统中的冷凝物)来提高安全性和可靠性的组件。此类组件包括例如安全阀、泄压阀、爆破片、蒸汽疏水阀等。
4.虽然此类组件在防止会由于过压状况导致的灾难性系统故障方面非常有效,但是当给定组件正在操作以释放系统压力时不会立即明显。这会导致系统效率降低和故障排除困难。此外,这些组件本身具有故障模式的特征,这会阻止它们执行其预期功能。但是,特别是对于大型安装,这些组件的手动检查和维护可能不是特别有效。
5.已经开发了用于监视蒸汽系统中的蒸汽疏水阀的电子监视器。但是,当今市场上的大多数蒸汽疏水阀监视器都存在检测错误状况的可靠性问题,以及大多数由电池供电并且因此要求周期性电池检查和/或更换的事实。这至少部分违背了安装这些监视器的目的。此外,鉴于安装和维护这些监视器的成本,目前将它们的使用扩展到加压系统中通常包括的无数其它类型的安全组件是不切实际的。
技术实现要素:
6.根据各种实施方式,提供了用于监视加压系统的方法、装置、设备、系统和计算机程序产品。
7.根据特定的一类实施方式,接收由与加压系统的组件相关联的监视器生成的监视器数据。该组件具有入口和出口。监视器被配置为捕获与组件的入口或组件的出口中的一个相关联的第一温度的测量结果,但不监视与组件的入口或出口中的另一个相关联的第二温度。从监视器数据导出第一时间序列数据。第一时间序列数据表示第一温度。基于第一时间序列数据并且不参考第二温度来确定组件的状态。
8.根据这类的具体实施方式,第一温度与沿着导管的圆周的第一位置对应,该导管连接到组件的入口或出口中的第一温度与其相关联的一个,并且监视器还被配置为捕获与组件的入口或出口中的第一温度与其相关联的一个相关联的第三温度的测量结果。第三温度与沿着导管的圆周并相对于第一位置移位的第二位置对应。从监视器数据导出第二时间序列数据。第二时间序列数据表示第三温度。还基于第二时间序列数据来确定组件的状态。根据更具体的实施方式,第二位置沿着导管的圆周相对于第一位置移位大约180度。根据另一个更具体的实施方式,第一位置相对于局部重力向量位于导管的顶部,而第二位置相对
于局部重力向量位于导管的底部。
9.根据这类的另一种具体实施方式,通过基于第一时间序列数据确定第一温度的改变率,并确定该改变率与组件的状态对应,基于第一时间序列数据确定组件的状态。
10.根据更具体的实施方式,组件的状态是打开状态或泄漏状态,并且确定改变率与组件的状态对应包括确定改变率与打开状态或泄漏状态对应。
11.根据这类的另一种具体实施方式,通过确定第一温度超过阈值,基于第一时间序列数据来确定组件的状态。根据更具体的实施方式,通过确定第一温度在第一持续时间内超过阈值或超过阈值达超过第二持续时间,基于第一时间序列数据来确定组件的状态。
12.根据这类的另一种具体实施方式,监视器还被配置为捕获组件附近的加压系统的环境温度的测量结果。从监视器数据导出第二时间序列数据。第二时间序列数据表示环境温度,并且还基于第二时间序列数据来确定组件的状态。根据更具体的实施方式,通过比较第一温度的改变与环境温度的改变,基于第一时间序列数据和第二时间序列数据确定组件的状态。
13.根据另一类实施方式,接收由与加压系统的导管相关联的监视器生成的监视器数据。监视器被配置为捕获与导管相关联的第一和第二温度的测量结果。第一温度与导管上的第一位置对应并且第二温度与导管上的相对于第一位置移位的第二位置对应。从监视器数据导出第一时间序列数据。第一时间序列数据表示第一温度。从监视器数据导出第二时间序列数据。第二时间序列数据表示第二温度。基于第一时间序列数据和第二时间序列数据来确定加压系统的状态。
14.根据这类的具体实施方式,第一位置沿着导管的圆周,并且第二位置也沿着导管的圆周。根据更具体的实施方式,第二位置沿着导管的圆周相对于第一位置移位大约180度。根据另一种更具体的实施方式,第一位置相对于局部重力向量位于导管的顶部,而第二位置相对于局部重力向量位于导管的底部。
15.根据这类的另一种具体实施方式,第一位置和第二位置沿着导管的纵向轴线分开。
16.根据这类的另一种具体实施方式,监视器还被配置为捕获导管附近的加压系统的环境温度的测量结果。从监视器数据导出第三时间序列数据。第三时间序列数据表示环境温度。还基于第三时间序列数据确定加压系统的状态。根据更具体的实施方式,通过将第一和第二温度中的一个或两者的改变与环境温度的改变进行比较基于第一、第二和第三时间序列数据来确定加压系统的状态。
17.根据这类的另一种具体实施方式,加压系统的状态表示导管中存在一种介质、导管中存在多种介质、导管中介质的相对比例、系统组件的状态、加压系统的一部分的状态或加压系统整体的状态中的一个或多个。
18.根据这类的另一种具体实施方式,监视器还与加压系统的组件相关联。该组件具有入口和出口。导管连接到组件的入口或组件的出口中的一个。第一和第二温度都与导管所连接的组件的入口或出口中的一个相关联,并且监视器不被配置为监视与组件的入口或出口中的另一个相关联的第三温度。确定加压系统的状态包括基于第一和第二时间序列数据并且不参考第三温度来确定组件的状态。
19.根据这类的另一种具体实施方式,确定加压系统的状态包括确定第一温度的改变
率、确定第二温度的改变率、确定第一温度超过阈值或确定第二温度超过阈值中的一个或多个。
20.可以通过参考说明书的其余部分和附图来实现对各种实施方式的性质和优点的进一步理解。
附图说明
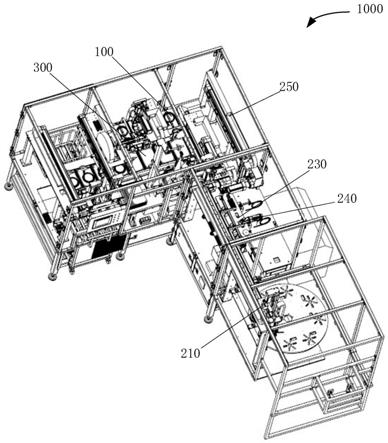
21.图1描绘了由本公开启用的加压系统和云连接的监视系统的示例。
22.图2是由本公开启用的监视器的框图。
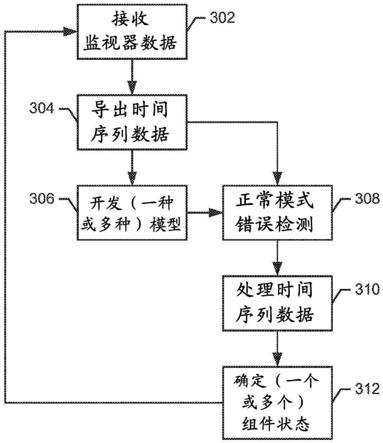
23.图3是图示由本公开启用的特定类的实施方式的操作的流程图。
24.图4-6是传感器数据的图,图示了特定类型的压力系统组件行为。
具体实施方式
25.现在将详细参考具体实施方式。这些实施方式的示例在附图中示出。应当注意的是,这些示例是出于说明性目的而描述的,并不旨在限制本公开的范围。更确切地说,所描述的实施方式的替代方案、修改和等同物包括在如所附权利要求限定的本公开的范围内。此外,为了促进对所描述的实施方式的透彻理解,可以提供具体细节。可以在没有这些细节中的一些或全部的情况下实践本公开的范围内的一些实施方式。另外,为了清楚起见,可能不详细描述众所周知的特征。
26.本公开描述了与监视加压系统中的各种类型的组件相关的各种设备、系统和技术。这些设备、系统和技术包括以从其环境中采集的电力运行的无电池监视器、用于获取设施中(或跨多个设施)的加压系统的组件的监视器数据的系统,和/或用于处理监视器数据以可靠地确定各个组件的状态和潜在的其它系统参数的技术。应当注意的是,所描述的示例可以以各种组合使用。还应当注意的是,本文描述的示例中的至少一些可以独立于其它示例来实现。例如,本文描述的用于处理监视器数据的技术可以用于处理使用多种监视器中的任何捕获的数据,所述多种监视器包括但不限于本文描述的监视器。类似地,本文描述的监视器可以与多种监视系统和数据处理技术中的任何一起使用,所述系统和技术包括但不限于本文描述的系统和技术。
27.图1描绘了监视系统100,其中各种类型的加压系统组件(例如,蒸汽疏水阀102a、安全阀102b和爆破片102c)(可能数百或甚至数千个此类组件)部署在采用蒸汽系统的整个设施中。为清楚起见,未示出蒸汽系统的细节。而且,应当注意的是,图1的蒸汽系统仅仅是可以使用本文描述的技术来实现的加压系统的示例。此外,图1中的加压系统组件被描绘为特定类型的组件(例如,蒸汽疏水阀102a被示为倒置桶式蒸汽疏水阀)。但是,应当注意的是,所描绘的组件仅仅是如本文所述的可以被监视的一些类型的组件的示例。即,本文描述的系统、监视器和技术可以与多种设备和组件中的任何一起使用而不脱离本公开的范围,所述多种设备和组件包括例如泄压阀、安全泄压阀、爆破片、控制阀、减压阀、蒸汽疏水阀等。
28.每个组件102具有安装在组件上或组件附近的相关联的监视器104。监视器104生成与相关联的组件102和/或其相邻管道相关的各种类型的传感器数据。监视器104将传感器数据传输到控制节点106,控制节点106进而经由网络110将传感器数据传输到监视器数
据服务108。如将认识到的,监视器104和控制节点106的数量将根据设施而变化。
29.监视器服务108可以符合多种体系架构中的任何,诸如例如部署在一个或多个协同位置处的服务平台,每个用一个或多个服务器112实现。监视器服务108也可以部分或全部使用基于云的计算资源来实现。网络110表示多种网络环境的任何子集或组合,包括例如基于ip上tcp/udp的网络、单播/多播/广播网络、电信网络、无线网络、卫星网络、有线网络、公共网络、专用网络、广域网、局域网、互联网、万维网、内联网、外联网等。
30.本文描述的示例中的至少一些预期基于计算模型的实施方式,该计算模型使得能够对计算资源的池(例如,基于云的网络、服务器、存储装置、应用和服务)进行无处不在、便捷、按需的网络接入。如将理解的,此类计算资源可以与控制监视器数据服务108的同一实体集成和/或在其控制下。可替代地,此类资源可以独立于服务108,例如,在分离的计算资源提供者的控制之下的平台上,例如,云计算平台或服务,服务108与该平台连接以根据需要消耗计算资源。
31.还应当注意的是,不管本文对特定计算范例和软件工具有任何提及,各种实施方式所基于的计算机程序指令可以与多种编程语言、软件工具和数据格式中的任何对应,可以存储在任何类型的非暂态计算机可读存储介质或(一种或多种)存储器设备中,并且可以根据各种计算模型来执行,所述计算模型包括例如客户端/服务器模型、在独立计算设备上的端对端模型,或根据其中各种功能可以在不同位置实现或使用的分布式计算模型来执行。
32.监视器104可以使用多种有线和无线协议和技术中的任何来与控制节点106通信。根据一些实施方式,控制节点106和监视器104使用由加利福尼亚州圣克拉拉(santa clara)的everactive
tm
公司提供的称为evernet
tm
的专有低功率通信协议进行通信。适于用于此类实施方式的此类协议和相关联电路系统的示例在美国专利no.9,020,456和9,413,403以及美国专利公开no.2014/0269563和no.2016/0037486中进行了描述,每个专利的全部公开内容都通过引用并入本文以用于所有目的。但是,应当注意的是,预期其中采用监视器与系统的其余部分之间的其它通信模式的实施方式。
33.控制节点106可以使用各种合适的工业互联网网关中的任何来实现,并且可以使用各种有线和无线协议中的任何连接到监视器服务108,所述有线和无线协议例如各种版本的以太网、各种蜂窝(例如,3g、lte、5g等)、各种wi-fi(802.11b/g/n等)等。在一些情况下,常规网关另外地被扩增为包括实现evernet
tm
协议的组件。
34.每个监视器104生成表示与和监视器104相关联的组件相关联的一个或多个温度的传感器数据,以及潜在地生成与该组件相关联的其它感测到的数据。可以使用在组件的入口侧和/或出口侧连接到管道的一个或多个温度传感器(例如,热敏电阻)来捕获温度测量数据。监视器还可以被配置为捕获和生成表示其中部署有监视器的环境的环境温度和/或湿度的传感器数据。
35.每个监视器104还可以被配置为生成表示由多种传感器类型和/或源生成的多种其它参数的传感器数据。例如,监视器可能测量和/或跟踪光级度、湿度、振动或其它类型的机械能、声能、超声能等。
36.根据特定实施方式,响应于来自其控制节点106或本地唤醒定时器的唤醒消息,每个监视器104从低功率模式过渡、在其每个传感器上获取读数,并在分组中向其控制节点
106传输读数的数字化版本,在分组中每个传感器及其读数成对(例如,作为标签-值对)。分组还包括用唯一标识符和分组中读数的时间戳识别特定监视器的信息(例如,在报头中)。唤醒消息可以从每个控制节点周期性地传输到其相关联的监视器。以这种方式,每个监视器104“持续地”监视与其相关联的组件。
37.每个控制节点106将从其监视器104接收到的分组存储在本地存储器中,并周期性或机会性地将存储的信息上传到监视器数据服务108(例如,当控制节点连接到互联网时上传到基于云的服务)。因此,如果出现中断,那么控制节点能够高速缓存传感器数据,直到连接恢复。传感器数据的处理中的至少一些可以由监视器数据服务108例如使用逻辑114来完成。但是,应当注意的是,其中由监视器104生成的数据的处理中的至少一些可以在别处执行(例如,由监视器104和/或由控制节点106执行)的实施方式是预期的。监视器数据服务108还可以存储用于监视器系统100的历史数据(例如,在数据存储116中)。由监视器数据服务108生成和/或接收并存储在数据存储116中的监视器数据和其它系统数据可以由与其中部署有蒸汽疏水阀监视系统的一个或多个设施相关联的负责人员按需访问(例如,在计算设备118上的仪表板中)。
38.用于确定加压系统中组件的状态的一些技术依赖于组件的入口侧和出口侧的温度的测量结果。但是,此类技术或者要求两个监视器,或者在使用单个监视器的情况下要求跨组件的布线。如本领域技术人员将认识到的,虽然从成本和维护的角度来看,后一种方法比前者更加优选,但是除了潜在地干扰加压系统的维护之外,布线还引入了易受攻击的故障点。
39.根据由本公开启用的各种实施方式,加压系统中的组件可以使用连接到组件的或者入口侧或者出口侧的单个监视设备来监视。用于监视器的时间序列数据(潜在地,捕获的数据和导出的数据两者)被用于定义用于各种加压系统组件类型中的任何的正常基线操作(以及潜在地,正常周围的某个范围)。然后使用此类正常的定义来检测与预期范围的偏差。这可能涉及一般错误条件的识别,但也可以被细化以识别由对应数据签名表示的特定状态和/或故障模式。可能使用由一个或多个监视器生成的数据、给定时间点的数据或在特定时间范围内捕获的数据来表示此类签名。
40.根据一些实施方式,采用用于加压系统中的组件的监视器,该监视器使用从其中部署有它们的环境中采集的能量来操作。图2是这种监视器200的示例的框图。在所描绘的实施方式中,监视器200使用以光伏(pv)设备202和/或热电发电机(teg)204从其环境采集的能量来供电,其中光伏(pv)设备202从监视器200附近的环境光捕获能量,热电发电机(teg)204从例如加压系统的管道捕获热能。预期这样的实施方式:其中监视器的电力管理单元可以被配置为使得监视器可以使用来自“仅太阳能”模式下的pv设备(如由从pv设备202到vin的虚线所指示的)、“仅teg”模式下的teg,或都处于“太阳能辅助”模式下的两者的组合(如由从pv设备202到vcap的实线所指示的)的电力。用于配置这些连接的合适的开关电路系统对于本领域技术人员将是已知的,因此为了清楚起见而未描绘。
41.监视器200包括电力管理单元(pmu)206,其控制经由负载开关212向控制器208和数据发送器210的电力递送。vin是到pmu206的采集输入,并且vcap和三个电压轨(为清楚起见而未示出)是生成的输出。pmu 206使用从pv设备202和teg 204中的任一个或两者采集的能量(取决于采集模式)经由充电电路216用vcap为能量存储设备214(例如,超级电容器)充
电。负载开关212和充电电路216控制何时向监视器200的其余部分供电并允许监视器200在能量存储设备214充电时起作用。
42.监视器200从例如与其相关联的系统控制节点接收唤醒消息(例如,用唤醒接收器218)。唤醒消息的接收触发pmu 206对负载开关212的控制,以向控制器208提供电力以捕获与由监视器200监视的系统组件相关联的读数,并向发送器210提供电力以将传感器数据传输到控制节点。pmu 206还经由数字i/o信道220与控制器208通信。这可以被控制器用来监视pmu 206的状态,并更新其配置或校准设置。
43.一旦被唤醒并通电,控制器208就使用与监视器200相关联的传感器的一个或多个集合来捕获读数。如所描绘的,这些可能包括一个或多个温度传感器222(例如,连接到与组件的入口侧或出口侧相邻的管道的热敏电阻)。还预期用于检测或测量其它参数或读数类型(例如,环境温度和/或光、声学、超声波、湿度、振动/机械能等)的传感器。如上面所讨论的,控制器208将数字化的传感器数据分组,并经由数据发送器210将(一个或多个)分组发送到相关联的传感器节点。
44.根据特定实施方式,pmu 206包括升压dc-dc转换器,该转换器采用最大功率点跟踪来将从采集源之一(例如,pv设备202或teg 204,取决于模式)接收的相对低的电压vin升压到其输出端处的更高的电压vcap,电压vcap被用于为能量存储设备(例如,214)充电。一旦vcap足够高,降压/升压、单输入多输出(simo)dc-dc转换器就接通并获取vcap并使其升高或降低(取决于能量存储设备214的充电水平),从而生成三个电压轨;分别为 2.5、 1.2和 0.6伏。这些电压轨用于为监视器200的其它电子器件(例如,控制器208和发送器210)供电。
45.在“太阳能辅助”采集模式下,pv设备202可以通过二极管224直接附接到vcap(以防止泄漏),如图2中的实线连接所表示的。在这种模式下,并且假设其输出足以正向偏置二极管224,pv设备202可以向teg 204提供充电辅助,其中两个采集源的能量自然地组合在能量存储设备214中,而不要求复杂的控制电子器件。根据特定实施方式,在“太阳能辅助”模式下,pv设备202被用于提高vcap,使得对升压转换器的偏置开启。这允许升压器从较低的输入电压采集(例如,允许从teg 204上的较低温度增量采集)。在另一种实施方式中,pv设备202可以连接到pmu 206的vin,如图2中的虚线所示。这允许对较低水平的光或较低电压的pv电池进行升压以对能量存储元件进行再充电。
46.更一般地,本公开启用其中能量可以从多个不同的能量源采集并以任何组合用于为这种监视器供电的实施方式。其它潜在的采集源包括振动能量(例如,使用基于压电或线性运动的、基于电磁的设备)和rf能量。如将认识到的,这些是ac能量源,因此要求ac-dc转换器。并且如果其中任何一个产生的dc电压不够高,那么可以使用升压转换器对其进行升压。
47.现在将参考图3描述根据特定类的实施方式对监视器数据的处理。如上面所提到的,这些处理技术可以与由本公开启用的监视器结合使用,但也可以与多种其它监视器类型中的任何一起使用。处理算法的输入可以包括用于监视器的时间序列数据(例如,以一个或多个向量的形式),其表示一个或多个捕获的温度、(可选地)环境温度,以及时间序列数据的对应值的时间戳。这样的时间序列数据表示使得能够对如本文所述的(一个或多个)组件状态进行建模和检测的“连续”监视。
48.图3中描绘的该类的实施方式预期使用仅捕获被监视组件的入口侧或出口侧的温度读数的监视器。如本文其它地方所暗示的,相对于使用捕获入口和出口温度读数两者的监视器,这种方法在成本和可靠性方面可以具有优势。但是,如将认识到的,通过忽略入口或出口的温度数据使用被配置为或能够捕获入口和出口温度两者的监视器来确定如本文所述的组件的状态仍然是可能的。因此,本公开的范围不应当限于排除此类实施方式。
49.此外,针对特定监视器的监视器数据的处理被描绘为包括训练阶段和随后的操作阶段。为了清楚起见,这些阶段被示为不同的。但是,将理解的是,这些阶段可以重叠,因为,例如,训练可以在正常操作期间继续,其中捕获的数据被用于更新基线模型。
50.现在参考图3,接收由安装在加压系统中的组件上或附近的监视器生成的监视器数据(302)。监视器数据包括在被监视组件的入口或出口处获取的温度读数的集合以及将温度读数彼此和/或与系统时间线关联的某种定时信息(例如,时间戳)。监视器数据还可以包括用于各种其它参数的读数的一个或多个附加集合,诸如例如环境温度、湿度、振动等。如上面所提到的,在一些情况下,监视器数据甚至可能包括用于系统组件的另一侧的温度读数的一个或多个集合。
51.读数的定时也可以有很大变化。例如,在一些加压系统中和/或对于一些组件类型,可能认为大约每分钟生成一次读数就足够了,并且能够依靠这种足够“连续”的监视来捕获相关行为。但是,预期其中读数之间的时间的范围可以从几秒到几分钟的实施方式。此外,连续的读数之间的时间不一定需要是一致的,从而在如何和何时捕获数据方面具有相当大的灵活性。
52.时间序列数据是从监视器数据导出的(304)。如上面所提到的,时间序列数据可以是一个或多个向量的形式,其中每个向量的特征值表示在给定时间点的读数。根据一些实施方式,每个向量可以包括监视器在其整个历史上的特征值,并且每次处理监视器数据时,都可以处理这整个历史。可替代地,预期其中仅可能处理在给定时间范围内的监视器数据的子集的实施方式。
53.时间序列数据可以包括表示未加工监视器数据(例如,出口温度、环境温度、时间等)的向量,但也可以包括表示可能对可靠地确定特定组件状态有用的导出的数据的向量。例如,导出的向量可能包括表示时间序列数据中连续样本之间的时间差的值(例如,如从时间输入向量导出的)。例如,在确定任何时间序列数据的改变率时,此类信息可能是有用的。
54.在另一个示例中,导出的向量可能表示温度数据的包络。例如,每个包络可能由两个向量表示,这两个向量包括与对应温度向量的原始温度值在时间上对准的温度值。包络的向量之一表示对应温度的最大值,而另一个表示最小值。此类表示对底层温度的改变缓慢适配,因此可能以意想不到的方式对于检测温度何时改变有用。
55.在另一个示例中,导出的向量可能包括表示连续温度样本之间的差异的值。例如,这样的信息在区分不同的组件状态和/或故障模式时可以是有用的。
56.在另一个示例中,导出的向量可能包括通过将温度读数馈送通过dc阻塞滤波器以生成信号中能量的测量结果而生成的值。这种向量在其稳定时将表示对应温度的稳定性,并且可以被认为是一种本底噪声。预期其中使用温度值的未加工量值或未加工量值的对数的实施方式。再次,这个信息对于区分不同的组件状态和/或故障模式可以是有用的。
57.在训练阶段期间,用于监视器的时间序列数据被用于开发一个或多个基线或模
型,每个基线或模型表示正被监视的加压系统组件的特定状态或错误状况(306)。这种训练的性质和结果所得的模型或基线可以根据组件的类型以及所表示的组件状态的数量和/或类型而有很大差异。在简单的示例中,训练阶段可能涉及由人类操作员人工检查在正常操作期间的入口或出口温度的范围,作为响应,人类操作员可能通过设置温度阈值来定义错误状况。在正常操作期间,当被监视组件的入口或出口温度超过定义的阈值时,将记录错误情况。对于许多应用和/或组件类型,这种监视方法将可能足以检测某些类型的事件,例如,爆破片的破裂。
58.在另一个示例中,可以(自动或手动)监视正常条件下入口或出口温度的改变率,并(自动或手动)定义错误状况,其中为入口或出口温度的量值和改变率两者设置阈值。这种方法可能是有用的,例如,对于将相对慢的温度改变预期为正常行为,但快速的温度改变表示错误或故障的应用。
59.在另一个示例中,可能预期系统组件的入口或出口处的温度以复杂但可预测的方式显著变化,例如对于控制阀就是这种情况。在这种应用中,可以使用机器学习(ml)技术来使用表示各种未加工的和导出的数据中的任何的输入向量来学习组件的行为,从而开发组件正常行为的模型或基线。然后,错误状况可以是与模型所表示的预期行为充分偏离的任何状态。这种方法还可以被用于学习以开发多个模型来支持区分正常操作期间组件的不同状态和/或与多个故障模式对应的多个状态。
60.在训练阶段之后,可以继续进行正常模式错误检测(308),其中在持续的基础上参考模型或基线处理时间序列数据(304)(310)以确定被监视的组件的当前状态(312)。如将理解的,训练和正常操作模式可以重叠和/或迭代,因为在正常操作期间捕获的信息可以被用于更新和演进在训练期间开发的(一个或多个)模型或(一个或多个)基线。
61.并且如上面所提到的,模型或基线的性质以及时间序列数据的处理可以根据被监视的组件的类型和/或要检测的状态的数量而显著变化。例如,对于爆破片,模型或基线可能是与爆破片的入口或出口温度进行比较的阈值。这种模型或基线背后的假设是,如果入口或出口温度超过阈值,那么爆破片一定已经破裂(即,完全吹破);否则爆破片将被视为完好无损。
62.另一方面,可能期望检测爆破片的中间条件或泄压值。即,此类组件可能会缓慢或间歇性地泄漏加压系统所携带的任何介质。简单的阈值可能不足以可靠地捕获这种行为。因此,模型或基线可以检测入口或出口温度随时间的趋势,这些趋势指示这种状况。
63.并且如将认识到的,这种模型或基线可能需要考虑环境温度。即,如果其中部署有组件的环境以环境温度的显著改变为特征,那么能够区分在同一时间段内的入口或出口温度的改变与环境温度的改变将是有用的(例如,通过比较相应温度的行为)。更一般地,对于由本公开启用的任何实施方式,环境温度可以以多种方式与模型或基线集成,以提供对应组件的(一个或多个)状态的更细微表示。
64.在另一个示例中,监视入口或出口温度随时间的方差(variance)可以被用于检测可能值得进一步研究的组件行为的相对小的改变。例如,如果循环打开和关闭的控制阀有缓慢和/或渐进的泄漏,那么即使方差示出只有几个百分点的改变,也可以检测到这一点。或者,如果减压阀被配置为在出口侧将入口侧的压力降低特定量,那么即使组件的出口侧的微小偏差也可以被检测到。
65.更一般地,对于简单的行为(例如,完整的相对于吹破的爆破片),用于检测组件的相对少的相关状态的模型或基线可以是直截了当并且容易导出的。对于更复杂的行为(例如,控制阀或蒸汽疏水阀),可以在训练阶段学习预期行为以及特定故障模式的行为,该训练阶段生成对应的模型,这些模型考虑基于从组件入口或出口处的监视器接收到的数据测得的和导出的各种数据。
66.根据一些实施方式,在系统中安装组件后建立针对给定系统组件的基线(例如,针对好与坏状态或针对一种或多种故障模式)。这涉及训练期,其长度取决于特定应用。例如,如果应用使得被监视的参数保持相当恒定,那么针对那个参数的训练期可以相对短。另一方面,如果针对那个参数存在相当大的方差,那么训练期可以花费更长的时间。这种训练形成基线,该基线然后被用于与随后捕获的监视器数据进行比较以确定(一个或多个)组件状态。如将认识到的,可以用某种级别的过滤来获取这种数据以防止假阳性。如还将认识到的,可以对每个被监视的设备进行训练。但是,应当注意的是,预期这样的实施方式:其中用于特定组件的基线可以通过为相同类型的和/或部署在相同或相似应用中的其它组件获得的等效数据来加强或替换。
67.根据一些实施方式,加压系统组件的温度可以在组件同一侧的多个位置处测量。例如,可以在连接到组件入口或出口的导管上沿着导管的不同距离处测量多个温度。例如,这可能有助于区分真实故障与由附近组件引起的假阳性故障。在另一个示例中,可以在沿着导管的圆周的位置处测量多个温度。这个想法是,这些温度之间的差异可以指示组件的特定状况或状态,因此可以被用于学习如何检测此类状况或状态。例如,管道顶部和底部的测量结果可以被用于检测两相流,其中气体在管道顶部,而液体在底部,例如,如可以在蒸汽系统中找到的,其中蒸汽是气体并且冷凝物是液体。
68.根据特定实施方式,沿着入口导管或出口导管的圆周测量两个出口温度;一个在导管顶部,一个在底部。这种方法可以特别有用,例如,在流经导管的材料实际上是两种介质的应用中,其中一种介质比另一种介质重,例如顶部的气体和底部的液体。如将认识到的,两种不同介质可能具有不同温度,特别是在它们是相同物质的两种不同相的情况下。因此,可以使用这个信息作为输入来学习预期行为和一种或多种故障模式。例如,一个相相对于另一个相的权重可以是不仅故障而且故障的严重性的指示。例如,如果蒸汽疏水阀的输出几乎完全是蒸汽,那么疏水阀故障很可能是漏气,因为没有允许液体积聚。相反,如果蒸汽疏水阀的输出主要是液体,那么这可以指示疏水阀不适合应用并且排放冷凝物的速度不够快。
69.更一般地,预期这样的实施方式:其中加压系统的导管上的多个监视点不必与除导管本身之外的特定或不同系统组件相关联。即,虽然这种方法可以被用于推断或确定系统组件(诸如安全阀或爆破片)的一种或多种状态,但它也可以被用于推断或确定系统的一种或多种状态,包括例如导管内的一种或多种介质的存在或状态。例如,监视导管顶部和底部的温度(例如,围绕导管的圆周)可以产生时间序列数据,从中可以参考如本文公开的所开发的基线或模型来推断或确定导管内两种不同介质(例如,蒸汽和冷凝物)的相对量。在另一个示例中,监视沿着导管的纵向轴线间隔开的温度可以产生表示温度差的时间序列数据,该温度差可以指示导管、系统的一部分或组件和/或整个系统中的一种或多种介质的特定状态。在另一个示例中,与具有特定形状的导管(例如,导管中的弯曲部或“u”形疏水阀)
相关联的多个温度可以表示多种状况。更一般地,可以基于对应的基线或模型从这样的时间序列数据中推断或确定各种系统状态。因此,本公开的范围不应当受限于参考与特定类型的系统组件、基线或模型、或特定组件或系统状态相关的具体实施方式。
70.图4是图示15psi压缩空气系统中安全阀行为的温度与时间的关系图。迹线402表示其中部署有系统的环境的环境温度。迹线404表示在出口导管顶部测得的安全阀的出口温度。迹线406表示在出口导管底部测得的安全阀的出口温度。刚好在13:10之后开始,在大约4分钟内,温度轨迹404记录大约13华氏度的温度下降并且温度迹线406记录大约12华氏度的对应温度下降。因为这是压缩空气系统,所以对于安全阀释放事件预期会出现这种温度下降。因此,基于本技术中针对安全阀的基线模型,将生成释放事件的通知。
71.图5是图示55psi压缩空气系统中安全阀的行为的温度与时间的关系图。迹线502表示其中部署有系统的环境的环境温度。迹线504表示在出口导管顶部测得的安全阀的出口温度。迹线506表示在出口导管底部测得的安全阀的出口温度。刚好在7:22之后开始,在不到2分钟内,温度迹线504记录大约12华氏度的温度下降并且温度迹线506记录大约11华氏度的对应温度下降。如在较高压力系统中所预期的那样(例如,与图4中描绘的系统行为相比,针对安全阀释放的温度下降会发生得更快。因为在本技术中这种预期的行为是用于这个组件的基线的一部分,所以所描绘的温度下降将再次成为生成安全阀释放事件通知的基础。
72.图6是图示15psi蒸汽系统中的安全的行为的温度与时间的关系图。迹线602表示其中部署有系统的环境的环境温度。迹线604表示在出口导管顶部测得的安全阀的出口温度。迹线606表示在出口导管底部测得的安全阀的出口温度。刚好在10:54之前开始,在大约2分钟内,温度迹线604记录超过30华氏度的温度升高,而温度迹线606记录仅大约20华氏度的温度升高。正如在蒸汽系统中可能预期的那样,出口导管底部的温度升高小于导管顶部的温度升高,这是因为系统中存在更稠密且温度更低的冷凝物。这个行为将与用于这种配置的基线进行比较并可能触发蒸汽释放事件。
73.如上面所提到的,还预期这样的实施方式:其中可以基于仅与系统组件的入口相关联的温度测量结果来确定系统和/或组件状态。例如,可以仅基于入口温度数据来检测蒸汽系统中蒸汽疏水阀的漏气故障。在正常操作期间,蒸汽疏水阀的入口上的压力(以及因此,温度)通常维持在预期水平或预期范围内。如果发生漏气故障,那么这会降低入口处的压力,从而造成温度下降。这种下降和对应的故障可以仅基于对入口温度的监视来检测。
74.在另一个示例中,与在正常操作条件期间主要存在的蒸汽的热得多的温度相比,由于冷凝物积聚回头(backing up)以及冷却导管,蒸汽疏水阀的冷故障导致疏水阀入口处的温度下降。再次,这种故障可以通过仅监视入口温度来检测。
75.而且,可以使用仅入口监视来支持区分不同类型故障的能力。例如,可以通过比较每个数据集合的绝对温度下降以及由相应数据集合表示的下降的改变率来实现上述漏气与冷故障之间的区分。
76.如参考前述示例将认识到的,本文描述的技术可以适于对各种类型的加压系统中的广泛组件的行为进行建模和监视。
77.本领域技术人员还将理解的是,在不脱离本公开的范围的情况下,可以对本文描述的实施方式的形式和细节进行改变。此外,虽然已经参考各种实施方式描述了各种优点、
方面和目标,但是本公开的范围不应当受限于参考此类优点、方面和目标。更确切地说,本公开的范围应当参考所附权利要求来确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。