手术机器人系统、外力推定装置以及程序
1.相关申请的交叉引用
2.本国际申请要求2019年10月17在日本专利局提交的日本发明专利申请第2019-190341号的优先权,并且日本发明专利申请第2019-190341号的全部内容通过引用而并入本文。
技术领域
3.本公开涉及手术机器人系统、外力推定装置以及程序。
背景技术:
4.近年来,使用手术机器人系统的内窥镜外科手术逐渐普及。内窥镜外科手术中,使用在手术机器人系统的臂装置上安装的腹腔镜、内窥镜、钳子等(以下表记为“手术工具”)(例如参照专利文献1)。
5.现有技术文献
6.专利文献
7.专利文献1:日本特表2009-522016号公报
技术实现要素:
8.发明要解决的问题
9.在内窥镜外科手术的对象即受检体(例如腹壁)配置有供手术工具插通的穿刺器(或通口)。希望在专利文献1所记载的手术机器人系统等中能够减轻手术时由手术工具施加给受检体的负荷,具体而言,能够减小由手术工具施加给受检体的力。
10.作为施加的力,可以例示经由穿刺器而施加给受检体的腹壁的力、从手术工具的除与穿刺器相对应的位置以外的部分(例如手术工具的前端部或轴部等)直接施加给受检体的力等。
11.作为检测由手术工具前端部所施加的力的方法,换言之,作为检测施加给手术工具前端部的力的方法,已知利用配置在前端部附近的传感器进行测量的方法、根据驱动力来推定对前端部关节施加的外力的方法。
12.但是,利用配置在前端部附近的传感器进行测量的方法需要将用于测量的传感器直接安装在手术工具前端部附近。因该传感器的配置位置而会产生难以实现手术工具前端部的小型化的问题、难以实施手术工具的杀菌
·
清洗处理的问题。从而会产生诸如使制造或使用的成本增多的问题等各种问题。
13.推定对前端部关节施加的外力的方法存在诸如外力的推定精度受到手术工具等机构内部的摩擦等影响而容易产生变化的问题、由于自由度的配置而存在无法检测到的力的方向的问题等。
14.此外,利用配置在前端部附近的传感器进行测量的方法和推定对前端部关节施加的外力的方法无法对施加给中间部的轴的力进行测量或者推定。因此,外力的推定值有可
能被估算成小于实际的外力值。
15.本公开的一个方面优选提供一种能够易于实现手术工具前端的小型化,以及易于提高对作用在手术工具的外力测量的精度,并且能够易于实现安全性提高的手术机器人系统、外力推定装置、以及程序。
16.解决问题的技术方案
17.作为本公开的一个方案即第1方案的手术机器人系统设置有:手术工具,所述手术工具用于受检体的手术,并且具有轴部,所述轴部形成为长条状,并且插通在所述受检体配置的穿刺器;臂部,所述臂部将所述手术工具把持为能够相对于所述受检体进行相对移动;检测部,相比所述轴部,所述检测部配置在所述臂部侧的位置,并且检测作用在所述手术工具的力的值以及扭矩的值,作用在所述手术工具的力的值以及扭矩的值包括:作用在所述轴部的纵长方向上的纵长方向的力的值、和绕所述纵长方向作用的纵长方向的扭矩的值;作用在与所述纵长方向交叉的第1交叉方向上的第1交叉方向的力的值、和绕所述第1交叉方向作用的第1交叉方向的扭矩的值;以及作用在与所述纵长方向以及所述第1交叉方向均交叉的第2交叉方向上的第2交叉方向的力的值、和绕所述第2交叉方向作用的第2交叉方向的扭矩的值;运算部,所述运算部基于所述纵长方向的力的值、所述第1交叉方向的力的值、所述第2交叉方向的力的值、所述纵长方向的扭矩的值、所述第1交叉方向的扭矩的值、所述第2交叉方向的扭矩的值、以及作用在所述穿刺器与所述轴部之间的阻力的值,来计算所述手术工具受到的来自所述穿刺器的第1外力的值、以及所述手术工具受到的来自除所述穿刺器以外的物体的第2外力的值。
18.本公开的第2方案的外力推定装置设置有:输入部,向所述输入部输入通过检测部检测的力的值以及扭矩的值,其中,相比手术工具所具有的轴部,所述检测部配置在所述臂部侧的位置,所述轴部形成为长条状,并且插通在受检体配置的穿刺器,所述力的值以及所述扭矩的值包括:作用在所述轴部的纵长方向上的纵长方向的力的值、和绕所述纵长方向作用的纵长方向的扭矩的值;作用在与所述纵长方向交叉的第1交叉方向上的第1交叉方向的力的值、和绕所述第1交叉方向作用的第1交叉方向的扭矩的值;以及作用在与所述纵长方向以及所述第1交叉方向均交叉的第2交叉方向上的第2交叉方向的力的值、和绕所述第2交叉方向作用的第2交叉方向的扭矩的值;以及运算部,所述运算部基于所述纵长方向的力的值、所述第1交叉方向的力的值、所述第2交叉方向的力的值、所述纵长方向的扭矩的值、所述第1交叉方向的扭矩的值、所述第2交叉方向的扭矩的值、以及作用在所述穿刺器与所述轴部之间的阻力的值,来计算所述手术工具受到的来自所述穿刺器的第1外力的值、以及所述手术工具受到的来自除所述穿刺器以外的物体的第2外力的值。
19.本公开的第3方案的程序用于使计算机实现以下功能,所述功能包括:输入功能,输入通过检测部检测的力的值以及扭矩的值,其中,相比手术工具所具有的轴部,所述检测部配置在所述臂部侧的位置,所述轴部形成为长条状,并且插通在受检体配置的穿刺器,所述力的值以及所述扭矩的值包括:作用在所述轴部的纵长方向上的纵长方向的力的值、和绕所述纵长方向作用的纵长方向的扭矩的值;作用在与所述纵长方向交叉的第1交叉方向上的第1交叉方向的力的值、和绕所述第1交叉方向作用的第1交叉方向的扭矩的值;以及作用在与所述纵长方向以及所述第1交叉方向均交叉的第2交叉方向上的第2交叉方向的力的值、和绕所述第2交叉方向作用的第2交叉方向的扭矩的值;以及运算功能,基于所述纵长方
向的力的值、所述第1交叉方向的力的值、所述第2交叉方向的力的值、所述纵长方向的扭矩的值、所述第1交叉方向的扭矩的值、所述第2交叉方向的扭矩的值、以及作用在所述穿刺器与所述轴部之间的阻力的值,来计算所述手术工具受到的来自所述穿刺器的第1外力的值、以及所述手术工具受到的来自除所述穿刺器以外的物体的第2外力的值。
20.根据本公开的第1方案的手术机器人系统、第2方案的外力推定装置、以及第3方案的程序,基于由检测部检测到的各种外力的值以及扭矩的值、以及作用在穿刺器与轴部之间的阻力的值,而能够计算出手术工具受到的来自穿刺器的第1外力的值、以及手术工具受到的来自除穿刺器以外的物体的第2外力的值。
21.此外,相比轴部,检测各种外力的值以及扭矩的值的检测部配置在臂部侧的位置,因此,与在手术工具的前端配置传感器的情况相比,易于实现手术工具的小型化。
22.在上述公开的第1方案中,优选设置有驱动部,所述驱动部对所述手术工具的所述轴部的前端部进行驱动,在所述臂部优选设置有保持所述手术工具的保持部,所述检测部优选配置在所述驱动部与所述保持部之间。
23.如上所述,在驱动部与保持部之间配置检测部,由此,例如与相比驱动部使检测部配置在前端部侧的位置的情况相比,检测部不易检测到因驱动部的动作而引起的力或扭矩。换言之,易于提高检测部所执行的检测的精度。
24.在上述公开的第1方案中,优选设置有前端外力检测部,所述前端外力检测部检测前端外力的值,所述前端外力是所述前端部受到的外力,所述运算部优选基于所述第2外力的值以及所述前端外力的值来计算轴外力的值,所述轴外力是所述轴部从除所述前端部以及所述穿刺器以外的物体受到的外力。
25.如上所述,通过设置前端外力检测部,运算部能够计算出轴部从除前端部以及穿刺器以外的物体受到的外力即轴外力的值。作为轴外力,可以例示如下的力,即,因手术工具相对于受检体进行相对移动而致使轴部的中间部分与受检体的臓器等接触,由此作用的力。
26.在上述公开的第1方案中,优选设置有储存部和选择部,作用在所述轴部与种类不同的所述穿刺器之间的多个阻力的值与所述穿刺器的种类建立关联并被储存在所述储存部,所述选择部用于选择所述穿刺器的种类,所述运算部优选从所述储存部获取与使用所述选择部选择的所述穿刺器的种类相对应的所述阻力的值,并使用所获取的所述阻力的值来计算所述第1外力以及所述第2外力。
27.如上所述,通过设置储存部和选择部,即使所使用的穿刺器被更换成作用在穿刺器与轴部之间的阻力不同的穿刺器,也易于抑制计算出的第1外力的值以及第2外力的值的精度变差。
28.发明的效果
29.根据本公开的第1方案的手术机器人系统、第2方案的外力推定装置、以及第3方案的程序,能够基于由检测部检测到的各种外力的值以及扭矩的值、以及作用在穿刺器与轴部之间的阻力的值,来计算手术工具受到的来自穿刺器的第1外力的值、以及手术工具受到的来自除穿刺器以外的物体的第2外力的值,由此,可达到如下效果:易于实现手术工具前端的小型化、以及提高对作用在手术工具的外力测量的精度,并且易于实现安全性的提高。
附图说明
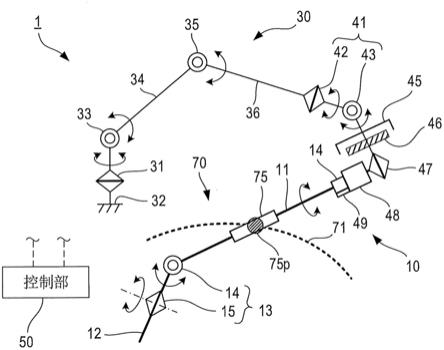
30.图1是说明本公开的第1实施方式的手术机器人系统的构成的示意图。
31.图2是说明图1的手术机器人系统的坐标系、力以及扭矩的图。
32.图3是说明图1的控制部的构成的框图。
33.图4是说明本公开的第2实施方式的手术机器人系统的构成的示意图。
34.图5是说明图4的控制部的构成的框图。
35.图6是说明本公开的第3实施方式的手术机器人系统的构成的示意图。
36.图7是说明图4的控制部的构成的框图。
37.附图标记的说明
38.1、101、201
…
手术机器人系统;10
…
手术工具;11
…
轴部;
39.30、130
…
臂装置(臂部);45
…
保持部;46
…
检测部;48
…
驱动部;
40.50、150、250
…
控制部(外力推定装置);51、151
…
输入部;
41.53、153、253
…
运算部;70
…
患者(受检体);75
…
穿刺器;
42.148
…
前端外力检测部;251
…
选择部;fp
…
第1外力;fr
…
第2外力;
[0043]5fpx
…
阻力
具体实施方式
[0044]
〔第1实施方式〕
[0045]
参照图1~图3对本公开的第1实施方式的手术机器人系统1进行说明。本实施方式涉及将手术机器人系统1用于内窥镜外科手术的手术辅助机器人等。如图1所示,手术机器人系统1中设置有手术工具10、臂装置30、以及控制部50。此外,臂装置30以及控制部50分别对应于臂部以及外力推定装置的一例。
[0046]
手术工具10是如内窥镜或钳子等在内窥镜外科手术中使用的各种器械。在本实施方式中,对手术工具10为钳子的示例进行说明。如图1所示,手术工具10设置有轴部11和主体14。
[0047]
轴部11是呈筒状或棒状延伸的部件,并且轴部11插通穿刺器75并插入到患者70的腹壁71的内部。轴部11设置有作为钳子的前端部12、弯曲部13。
[0048]
此外,以下将穿刺器还表记为通口。此外,患者70对应于受检体的一例。
[0049]
前端部12是轴部11中的前端的部分,前端是轴部11中的位于插入患者70的一侧的端部。在本实施方式中,前端部12设置有夹钳对象物的结构。
[0050]
弯曲部13形成为筒状或柱状,并且弯曲部13的第1端部配置在前端部12,弯曲部13的第2端部配置在轴部11。此外,弯曲部13具有能够相对于轴部11的延伸方向朝横向弯曲的结构。在图1中,示出了弯曲部13包括两个转动部14、15的示例,两个转动部14、15各自的转动轴线彼此交叉,更优选两个转动部14、15各自的转动轴线正交。此外,弯曲部13的结构不限定于上述结构。
[0051]
主体14是手术工具10中与臂装置30进行安装或拆卸的部分。此外,主体14具有能够传递从臂装置30传递的用于驱动前端部12或弯曲部13的驱动力的结构。此外,主体14的具体结构没有特别限定。
[0052]
臂装置30以能够改变手术工具10的位置以及位姿的方式支承手术工具10。此外,
臂装置30被控制成:即使改变手术工具10的位置或位姿,手术工具10也会经过枢转位置75p,其中,枢转位置75p是以臂装置30为基准而确定的预定相对位置。此外,以下将枢转位置75p还表记为不动位置。
[0053]
此外,在本实施方式中,臂装置30以使得手术工具10经过枢转位置75p的方式对后述旋转部31、第1臂转动部33以及第2臂转动部35等全部进行控制。不过,只要至少手术工具10经过枢转位置75p即可,臂装置30也可以并非主动地对旋转部31、第1臂转动部33以及第2臂转动部35等全部进行控制。
[0054]
此外,枢转位置75p既可以已知,也可以未知。换言之,枢转位置75p既可以是预先给定的位置,也可以是根据由某传感器测量到的值而得出的位置。枢转位置75p还可以是由臂装置30的动作而推定的位置。
[0055]
枢转位置75p与作为内窥镜外科手术对象的患者70的腹壁71的插入孔的位置大致一致。该插入孔配置有供手术工具10的轴部11插通的穿刺器75。
[0056]
本实施方式的穿刺器75与被插入的手术工具10的轴部11接触,并且该穿刺器75未被连结固定到臂装置30。换言之,穿刺器75并非由臂装置30保持。
[0057]
换言之,将穿刺器75和无需进行枢转位置对位的臂装置30一起使用,也就是说,将穿刺器75和无需进行不动点的位置对位的臂装置30一起使用。与对穿刺器75和臂装置30实施连结固定的情况相比,由于未连结固定穿刺器75和臂装置30,从而易于提高第1外力fp和第2外力fr的计算精度。
[0058]
如图1所示,臂装置30设置有旋转部31、第1臂转动部33、第1臂34、第2臂转动部35、第2臂36、万向机构部41、保持部45、检测部46、旋转支承部47、驱动部48、以及装卸部49。基于从控制部50输入的控制信号来驱动控制旋转部31、第1臂转动部33、第2臂转动部35、以及万向机构部41的第1关节部42和第2关节部43。此外,在本实施方式中,还基于从控制部50输入的控制信号来驱动控制手术工具10的旋转支承部47以及驱动部48。
[0059]
旋转部31是在臂装置30固定于基台32的部分处配置的关节。如图3所示,旋转部31设置有用于检测旋转部31的相位的传感器31s。旋转部31只要是能够被驱动成绕在上下方向延伸的旋转轴线进行旋转的结构即可,不限定其详细结构。
[0060]
在本实施方式中,在旋转部31设置有致动器31a,致动器31a利用空气等气体的压力产生驱动力,从而使旋转部31进行转动。利用该致动器31a产生的驱动力来驱动旋转部31,以使其进行旋转。
[0061]
第1臂转动部33配置在旋转部31与第1臂34之间。此外,第1臂转动部33具有能够被驱动成绕在水平方向延伸的转动轴线进行转动的结构。如图3所示,第1臂转动部33设置有用于检测第1臂转动部33的相位的传感器33s。
[0062]
此外,在本实施方式中,在第1臂转动部33设置有致动器33a,致动器33a利用空气等气体的压力产生驱动力。利用该致动器33a产生的驱动力来驱动第1臂转动部33,以使其进行转动。
[0063]
在本实施方式中,在第1臂转动部33设置有致动器33a。不过,也可以在第1臂转动部33不设置致动器33a。
[0064]
如图1所示,第1臂34配置在第1臂转动部33与第2臂转动部35之间配置。在本实施方式中,第1臂34具有呈棒状延伸的形状,不过其形状无特别限定。
[0065]
第2臂转动部35配置在第1臂34与第2臂36之间。此外,第2臂转动部35具有能够被驱动成绕在水平方向延伸的转动轴线进行转动的结构。如图3所示,第2臂转动部35设置有用于检测第2臂转动部35的相位的传感器35s。
[0066]
此外,在本实施方式中,在第2臂转动部35设置有致动器35a,致动器35a利用空气等气体的压力产生驱动力。利用该致动器35a产生的驱动力来驱动第2臂转动部35,以使其进行转动。
[0067]
在在本实施方式中,在第2臂转动部35设置有致动器35a。不过,也可以在第2臂转动部35不设置致动器35a。
[0068]
如图1所示,第2臂36配置在第2臂转动部35与万向机构部41之间。在本实施方式中,第2臂36具有呈棒状延伸的形状,不过其形状无特别限定。
[0069]
万向机构部41配置在第2臂36与保持部45之间。万向机构部41具备第1关节部42和第2关节部43,第1关节部42的旋转轴线和第2关节部43的旋转轴线相互交叉,更优选第1关节部42的旋转轴线和第2关节部43的旋转轴线正交。
[0070]
第1关节部42配置在万向机构部41中的靠第2臂36的一侧。第1关节部42配置成使得其旋转轴线沿着第2臂36延伸的方向延伸的位姿。如图3所示,第1关节部42设置有用于检测第1关节部42的相位的传感器42s。
[0071]
第2关节部43配置在万向机构部41中的靠保持部45的一侧。第2关节部43配置成使得其旋转轴线沿着与第2臂36延伸的方向交叉的方向,更优选沿着与第2臂36延伸的方向正交的方向延伸的位姿。如图3所示,第2关节部43设置有用于检测第2关节部43的相位的传感器43s。
[0072]
在本实施方式中,第1关节部42以及第2关节部43分别设置有利用空气等气体的压力产生驱动力,从而使第1关节部42以及第2关节部43进行转动的致动器42a以及致动器43a。不过,第1关节部42以及第2关节部43各自也可以不设置致动器42a以及致动器43a。
[0073]
保持部45配置在万向机构部41与旋转支承部47之间。保持部45只要是能够保持旋转支承部47以及驱动部48的结构即可,不限定其详细结构。
[0074]
检测部46配置在保持部45与被保持部45保持的驱动部48之间。此外,检测部46是力觉传感器,其用于检测作用在手术工具10或者保持部45的力fw、以及作用在手术工具10或者保持部45的扭矩mw。此外,扭矩mw也表记为“力矩”。作为检测部46,可以使用检测力和力矩的力/扭矩传感器,并且不特别限定检测方法等。
[0075]
通过检测部46检测的力fw包含:在轴部11的纵长方向上作用的纵长方向的力的分量;在与纵长方向的交叉的第1交叉方向上作用的第1交叉方向的力的分量;以及在与纵长方向以及第1交叉方向均交叉的第2交叉方向上作用的第2交叉方向的力的分量。此外,扭矩mw包含:绕纵长方向作用的纵长方向的扭矩的分量;绕第1交叉方向作用的第1交叉方向的扭矩的分量;以及绕第2交叉方向作用的第2交叉方向的扭矩的分量。换言之,检测部46是6自由度的力觉传感器。
[0076]
如图2所示,当在手术工具10上设定有正交坐标系{5}时,上述纵长方向、第1交叉方向、以及第2交叉方向分别对应于坐标系{5}中的x方向、y方向、以及z方向。
[0077]
此外,配置检测部46的位置可以是如上所述的保持部45与驱动部48之间的位置,也可以是距手术工具10的轴部11更近的位置。若检测部46的配置位置距轴部11较近,则与
检测部46的配置位置距轴部11较远的情况相比,更易于提高第1外力fp和第2外力fr的计算精度。
[0078]
旋转支承部47将驱动部48支承为能够绕手术工具10的轴部11的中心轴线进行旋转。在手术工具10安装到装卸部49的状态下,旋转支承部47将驱动部48以及手术工具10支承为能够绕上述中心轴线进行旋转。在旋转支承部47设置有致动器47a,致动器47a产生驱动力并控制旋转支承部47的旋转。
[0079]
驱动部48被旋转支承部47支承为能够进行旋转。驱动部48产生用于驱动手术工具10的前端部12以及弯曲部13的至少一方的驱动力。
[0080]
在本实施方式中,在驱动部48配置利用空气等气体的压力产生驱动力的气动致动器。该情况下,产生的驱动力经由装卸部49而传递到手术工具10的主体14,并且经由穿过轴部11内部的线材传递给前端部12以及弯曲部13的至少一方。
[0081]
此外,作为驱动部48的结构,不特别限定其详细结构。而且,产生驱动力的方式可以是如上所述的使用气体压力的方式,也可以是使用电动马达的方式,不限定具体的方式。
[0082]
装卸部49配置在驱动部48与手术工具10之间。此外,装卸部49具有供手术工具10的主体14安装或拆卸的结构,并且具有能够从驱动部48向主体14传递驱动力的结构。此外,装卸部49的详细结构无特别限定。
[0083]
控制部50对手术工具10受到的来自穿刺器75的第1外力、以及手术工具10受到的来自除穿刺器75以外的物体的第2外力进行计算。此外,控制部50基于传感器31s、传感器33s、传感器35s、传感器42s以及传感器43s的检测信息,并利用运动学计算来求算臂装置30以及手术工具10的位置位姿。控制部50基于求算出的位置位姿而向致动器31a等输出驱动指令。通过运算部53计算出的外力的值等外力信息也可以加入到输出的驱动指令中。
[0084]
如图1以及图3所示,控制部50是具有cpu、rom、ram、输入输出接口等的诸如计算机等信息处理装置。此外,cpu是中央运算处理器的简称。储存在上述rom等储存装置中的程序使cpu、rom、ram、输入输出接口协同工作,并至少作为输入部51、储存部52、运算部53来发挥功能。
[0085]
检测部46中检测并输出的力fw以及扭矩mw的信息被输入到输入部51。具体而言,输入纵长方向的力的值、第1交叉方向的力的值和第2交叉方向的力的值、以及纵长方向的扭矩的值、第1交叉方向的扭矩的值和第2交叉方向的扭矩的值。此外,传感器31s、传感器33s、传感器35s、传感器42s以及传感器43s的检测信号也被输入到输入部51。
[0086]
储存部52预先储存作用在穿刺器75和手术工具10的轴部11之间的阻力5fpx的值、以及作用在手术工具10的重力w的值。此外,重力w的值可以使用重量或者质量的值。阻力根据穿刺器75与轴部11的组合而取不同的值。在已知手术机器人系统1中使用的穿刺器75以及手术工具10的情况下,预先测量或者算出阻力并储存到储存部52中。
[0087]
运算部53基于输入到输入部51的力fw以及扭矩mw的信息、以及预先储存在储存部52的阻力的值,来计算第1外力的值以及第2外力的值。此外,后文对计算第1外力的值以及第2外力的值的详细内容进行说明。
[0088]
接下来,对计算具有上述构成的手术机器人系统1中的第1外力的值以及第2外力的值进行说明。首先,参照图2对计算第1外力的值以及第2外力的值的算式的推导进行说明。
[0089]
首先,求出以图2所示的坐标系{5}为基准的平移力的平衡的算式(1)、以检测部46为中心的力矩的平衡的算式(2)。在此,坐标系{5}是在手术工具10上设定的正交坐标系,将轴部11延伸的方向设为x方向。
[0090]fr
f
p
w fw=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0091]mw
(p
r-pw)
×fr
(p
p-pw)
×fp
(p
g-pw)
×
w=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0092]
其中,fr是当所求算的第2外力集中作用在作为钳子的前端部12时的外力,即,作为与施加在其他部位的轴外力的合力而集中作用在前端部12的外力,pr是前端部12的位置向量。fp是作用在轴部11中的与插入孔相对的部分的外力,pp是插入孔的位置向量。w是作用在手术工具10的重力,pg是手术工具10的重心的位置向量。fw是作用在保持部45的力,并且是通过检测部46检测到的力。mw是作用在保持部45的力矩,并且是通过检测部46检测的力矩。作用在轴部11中的与插入孔相对的部分的外力对应于第1外力的一例。
[0093]
在此,未知数仅为fp以及fr。其他的值可以由传感器进行测量,或者可以由机器人的正向运动学进行计算推定。若从上述算式(1)以及(2)中消去fr,则为下列算式(3)
[0094]
(p
p-pr)
×fp
=-(p
g-pr)
×
w-(p
w-pr)
×fw-mwꢀꢀ
(3)
[0095]
在图2所示臂装置30上设定坐标系{0}。以坐标系{5}为基准来考虑算式(3),并且以坐标系{5}为基准的坐标系{0}的位姿矩阵如下所示。使用该位姿矩阵时,算式(3)被表示成为以下算式(4)。
[0096][0097][0098]
若使用下列算式来表示算式(4),并使算式(4)的右边为m,则算式(4)被表示成为算式(5)。
[0099][0100][0101]
若使用下列算式来表示算式(5),则算式(5)被表示成为算式(6)。
[0102][0103][0104]
算式(6)是以pr为中心的力矩的平衡的算式。算式(6)是来自斜对称矩阵的联立方程式。仅通过算式(6)无法独立解出3个变量5fpx、5fpy以及5fpz。
[0105]
在此,5fpx是作用在穿刺器75与手术工具10的轴部11之间的阻力。因此,可以在考虑到穿刺器75的构造或臂装置30的外力补偿性能等将5fpx的值预先设定为适当的条件或值。作为5fpx的值,可以例示下列3个条件。下列条件中的f为常数,μ为摩擦系数。
[0106]5f
px
·
=0
[0107]5f
px
=f
[0108]5f
px
=μn
[0109]
其中
[0110]
例如,当使用5fpx=0的条件时,若对算式(6)的5fpy以及5fpz进行求解,则如以下算式(7)以及算式(8)所示。
[0111][0112][0113]
此外,利用算式(1)的关系对上述算式(7)以及算式(8)的fry以及frz进行求解,则如以下算式(9)以及算式(10)所示。
[0114]fry
=-f
py-w
y-f
wy
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0115]frz
=-f
pz-w
z-f
wz
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0116]
可以由以下示出的检测部46的x方向上的分量的合力的关系算式(11)来求出在前端部12产生的与轴部11平行的外力frx。此外,在算式(11)中,为了在使用除5fpx=0以外的条件时易于理解,而示出剩fpx项的算式。
[0117]fwx
=-f
rx-f
px-w
x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0118]
在使用5fpx=f的条件时和使用5fpx=μn的条件时,通过对算式(6)的5fpy以及5fpz进行求解,也能够获得求算每个值的算式。对于fry、frz以及frx也可以以与上述同样的方式获得求算每个值的算式。
[0119]
此外,5fpy、5fpz、fry、frz以及frx的值的求算方法既可以是使用通过上述算式变形而解析的方法进行求算的方法,也可以是诸如使用计算机的数值解法等利用联立方程式的模式进行求算的方法。
[0120]
接下来,对手术机器人系统1中的计算第1外力的值以及第2外力的值进行说明。在此,上述fp对应于第1外力的一例,fr对应于第2外力的一例。控制部50的运算部53执行计算上述fp以及fr的运算。
[0121]
控制部50执行以下处理:从储存部52获取在计算fp以及fr时使用的作用在手术工具10的重力w的值,并且从检测部46获取作用在保持部45的力fw以及作用在保持部45的力矩mw。
[0122]
并且,控制部50执行对fp以及fr的计算时所使用的pr、pp、pg以及pw的位置向量进行求算的运算。在执行运算时,控制部50执行以下运算处理:获取从传感器31s、传感器33s、传感器35s、传感器42s以及传感器43s输出的用于计算位置向量的检测信号、以及控制弯曲部13的位姿的控制信号。
[0123]
并且,关于在求算位置向量时使用的算式、臂装置30中的第1臂34等的长度和/或形状等尺寸信息,则使用预先储存在储存部52的信息。
[0124]
此外,在上述实施方式中,在求算pr、pp、pg、pw的位置向量时,使用了检测相位的传感器31s、传感器33s、传感器35s、传感器42s以及传感器43s。不过,也可以使用控制臂装置30的位姿的控制信号来取代检测相位的传感器的输出。
[0125]
同样,在上述实施方式中,使用控制弯曲部13的位姿的控制信号,不过,也可以使
用检测弯曲部13的位姿的传感器的输出来取代该控制信号。
[0126]
此外,关于在求算位置向量时使用的算式和/或该算式所包含的参数等,可以对应着臂装置30和/或手术工具10的形式或形状等使用各种算式和/或参数,不限于本实施方式的算式和/或参数。
[0127]
然后,控制部50的运算部53执行以下运算:使用pr、pp、pg以及pw的位置向量、重力w、力fw、力矩mw、以及上述算式(7)(8)(9)(10)(11)等来计算fp以及fr。
[0128]
根据上述构成的手术机器人系统1、控制部50以及程序,基于由检测部46检测到的各种外力的值以及扭矩的值、以及作用在穿刺器75与轴部11之间的阻力5fpx的值,而能够计算出手术工具10受到的来自穿刺器75的第1外力fp的值、以及手术工具10受到的来自除穿刺器75以外的物体的第2外力fr的值。
[0129]
此外,相比轴部11,检测各种外力的值以及扭矩的值的检测部46配置在臂装置30侧的位置,因此,与在手术工具10的前端配置传感器的情况相比,易于实现手术工具10的小型化。
[0130]
检测部46配置在驱动部48与保持部45之间,由此,例如与相比驱动部48使检测部46配置在前端部12侧的位置的情况相比,检测部46不易检测到因驱动部48的动作而引起的力或扭矩。换言之,易于提高检测部46所执行的检测的精度。
[0131]
能够利用从作为6自由度的力/扭矩传感器的检测部46输出的各种的信息独立地求算出各外力分量。因此,理论上不会将施加给作为钳子的前端部12或穿刺器75的外力计算得过小。
[0132]
使用计算出的第1外力fp的值和第2外力fr的值对手术机器人系统1进行控制,由此,即使作用在手术工具10的重力w或穿刺器75的摩擦力fpx等包含有一定的不准确性,通过适当地设定控制的阈值,也易于作为力反馈或安全功能而有效地加以利用。
[0133]
例如,能够将手术工具10受到的来自穿刺器75的第1外力fp限制在一定程度以下,且能够实现不屈服于作用在手术工具10的轴部11的外力而保持前端部12的位置位姿这样的动作。
[0134]
能够有意识地对手术工具10受到的来自穿刺器75的第1外力fp和手术工具10受到的来自除穿刺器75以外的物体的第2外力fr加以区别并进行检测。因此,通过以某种方式将第1外力fp和第2外力fr呈现给手术机器人系统1的操作者,而易于提高手术视野内以及视野外的安全性。
[0135]
〔第2实施方式〕
[0136]
接下来,参照图4以及图5对本公开的第2实施方式的手术机器人系统进行说明。本实施方式的手术机器人系统的基本构成与第1实施方式相同,在手术工具的前端部受到的外力的求算方法上不同于第1实施方式。因此,在本实施方式中,使用图4以及图5对手术工具的前端部受到的外力的求算方法进行说明,而省略其他的说明。
[0137]
如图4所示,在本实施方式的手术机器人系统101中设置有手术工具10、臂装置130、以及控制部150。此外,控制部150对应于作为外力推定装置的构成的一例。
[0138]
臂装置130设置有旋转部31、第1臂转动部33、第1臂34、第2臂转动部35、第2臂36、万向机构部41、保持部45、检测部46、旋转支承部47、驱动部48、装卸部49、以及前端外力检测部148。前端外力检测部148是检测手术工具10的前端部12所受的外力即前端外力ft的值
的传感器。
[0139]
在本实施方式中,在驱动部48具备利用空气等气体的压力来产生驱动前端部12或弯曲部13的驱动力的气动致动器的情况下,前端外力检测部148包括检测气动致动器的活塞等的位移的传感器、以及检测气缸内的气体的压力的传感器。
[0140]
此外,前端外力检测部148只要检测作用在前端部12的外力ft即可,不限定其配置位置和检测的方法。例如,前端外力检测部148可以是配置在手术工具10的前端部12的附近且检测作用在前端部12的外力ft的传感器。
[0141]
如图4以及图5所示,控制部150是具有cpu、rom、ram、输入输出接口等的诸如计算机等信息处理装置。此外,cpu是中央运算处理器的简称。
[0142]
储存在上述rom等储存装置中的程序使cpu、rom、ram、输入输出接口协同工作,并至少作为输入部151、储存部52、运算部153来发挥功能。
[0143]
与第1实施方式的输入部51相比,还向输入部151输入由前端外力检测部148检测到的施加给前端部12的前端外力ft的信息。
[0144]
运算部153基于输入到输入部151的力fw以及扭矩mw的信息、前端外力ft的信息、以及预先储存在储存部52的阻力的值,来计算第1外力fp的值以及第2外力fr的值。
[0145]
本实施方式的运算部153在计算第1外力fp的值以及第2外力fr的值时,执行与第1实施方式同样的运算,在计算作用在前端部12的前端外力ft的值时,基于前端外力检测部148检测并输出的前端外力ft的信息来执行运算。并且,使用计算出的第2外力fr以及作用在前端部12的前端外力ft,对从除前端部12以及穿刺器75以外的物体受到的外力即轴外力进行计算。将轴外力的合力设为fs时,可以通过以下算式进行求算。
[0146]fs
=f
r-f
t
[0147]
根据上述构成,通过设置前端外力检测部148,运算部153能够计算出轴部11从除前端部12以及穿刺器75以外的物体受到的外力即轴外力的值。作为轴外力,可以例示如下的力,即,因手术工具10相对于患者70进行相对移动而致使轴部11的中间部分与患者70的臓器等接触,由此作用的力。
[0148]
此外,与不使用前端外力检测部148的情况相比,将通过前端外力检测部148求算的前端外力ft用作参照信号,由此易于进一步提高计算出的第1外力fp和第2外力fr的精度。
[0149]
〔第3实施方式〕
[0150]
接下来,参照图6以及图7对本公开的第3实施方式的手术机器人系统进行说明。本实施方式的手术机器人系统的基本构成与第1实施方式相同,不过,在能够对应种类不同的穿刺器这一点上不同于第1实施方式。因此,在本实施方式中,使用图6以及图7对能够对应种类不同的穿刺器的内容进行说明,而省略其他的说明。
[0151]
如图6所示,在本实施方式的手术机器人系统201中设置有手术工具10、臂装置30、以及控制部250。此外,控制部250对应于作为外力推定装置的构成的一例。
[0152]
如图6以及图7所示,控制部250是具有cpu、rom、ram、输入输出接口等的诸如计算机等信息处理装置。此外,cpu是中央运算处理器的简称。储存在上述rom等储存装置中的程序使cpu、rom、ram、输入输出接口协同工作,并至少作为输入部51、选择部251、储存部252、以及运算部253来发挥功能。
[0153]
选择部251用于识别手术机器人系统1中使用的穿刺器75。在本实施方式中,手术机器人系统1中使用的穿刺器75具有多个种类,并且针对每一个种类而获取识别穿刺器75的信息。
[0154]
例如可以列举以下示例:选择部251对手术机器人系统1中使用的穿刺器75的种类进行显示,并从显示的穿刺器75中指定所要使用的穿刺器75,由此来进行识别。
[0155]
此外,还可以列举如下示例:通过向选择部251输入标记在穿刺器75的型号或序列号等来识别使用的穿刺器75,不限定进行识别的具体方法。
[0156]
在储存部252中预先储存识别手术机器人系统1中使用的穿刺器75的信息、作用在穿刺器75与手术工具10的轴部11之间的阻力5fpx的值、以及作用在手术工具10的重力w的值。此外,重力w可以使用重量的值。并且,识别穿刺器75的信息和该穿刺器75的阻力5fpx的值建立关联并被储存。
[0157]
运算部253基于输入到输入部51的力fw以及扭矩mw的信息、以及预先储存在储存部252的阻力的值,来计算第1外力fp的值以及第2外力fr的值。此外,与第1实施方式不同的是,运算部253的运算内容为:从储存部252获取阻力5fpx的值并执行运算,其中该阻力5fpx的值已与用于识别由选择部251选择的穿刺器75的信息建立了关联。除此之外的运算内容与第1实施方式相同。
[0158]
根据上述构成,通过设置储存部252和选择部251,即使所使用的穿刺器75被更换成作用在穿刺器75与轴部11之间的阻力5fpx不同的穿刺器75,也能够利用与所使用的穿刺器75相对应的阻力5fpx计算出第1外力fp的值以及第2外力fr的值。其结果为,与不使用与穿刺器75相对应的阻力5fpx的情况相比,易于抑制计算出的第1外力fp的值以及第2外力fr的值的精度变差。
[0159]
此外,本公开的技术范围不限于上述实施方式,在不脱离本公开的主旨的范围内能够施加各种变更。例如,本公开不限于应用于上述实施方式,也可以应用于将实施方式适当加以组合后的实施方式,无特别限定。
[0160]
此外,例如在上述实施方式中,在轴部11的前端设置的前端部12为钳子。不过,前端部12不限于钳子,也可以是在内窥镜手术等中使用的其他器械。
[0161]
作为应用本公开的手术机器人系统、外力推定装置、以及程序的内窥镜外科手术,可以列举手术工具10插入患者70的体内的所有内窥镜外科手术。内窥镜外科手术中的在消化外科实施的以消化器官等大型臓器为对象且容易对手术工具10施加外力的手术、在胸外科实施的从肋骨之间插入手术工具10的手术、以及以腹壁较厚的肥胖患者为对象的手术均为适合使用本公开的手术机器人系统的内窥镜外科手术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
