技术特征:
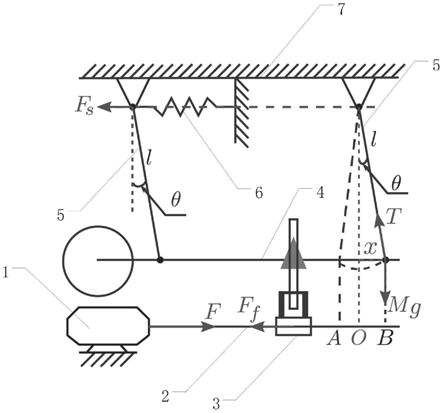
1.恒力接触系统的辨识方法,其特征在于,恒力接触系统包括电机(1)、丝杠(2)、滑块(3)、横梁(4)、摆臂(5)、弹簧(6)和机架(7);电机(1)的动力输出轴与丝杠(2)的一端传动连接,用于带动丝杠(2)旋转;丝杠(2)与滑块(3)的下方螺旋配合,用于带动滑块(3)沿丝杠(2)的长轴移动;滑块(3)的上方悬挂在横梁(4)上,用于通过滑块(3)带动横梁(4)移动;摆臂(5)的数量为两条且平行设置,两条摆臂(5)的底端分别与横梁(4)的两端铰接,两条摆臂(5)的顶端分别与机架(7)铰接;使得横梁(4)移动时带动摆臂(5)的底端移动,从而带动摆臂(5)的顶端绕对应的轴旋转;弹簧(6)的一端与一条摆臂(5)的侧壁固定,另一端与机架(7)固定;且弹簧(6)始终为压缩状态;所述辨识方法具体步骤如下:步骤一、建立恒力接触系统模型;所述恒力接触系统模型包括线性部分和非线性部分;步骤二、控制所述滑块(3)分别以不同速度进行匀速运动,计算得到所述恒力接触系统模型中的常数项;并测得电流和位移的关系,计算得到补偿电流;步骤三、将所述常数项作为非线性干扰观测器的初值以构建非线性干扰观测器;步骤四、通过非线性干扰观测器对所述恒力接触系统进行观测得到观测干扰,将观测干扰引入恒力接触系统模型得到名义线性模型,所述名义线性模型为恒力接触系统模型的线性部分,再通过结合施加补偿电流的频域响应方法对名义线性模型进行辨识;步骤五、通过rbf神经网络对非线性部分进行辨识;所述非线性部分为名义线性模型的输出与恒力接触系统的输出之间的等效误差;所述等效误差为rbf神经网络的输出;步骤六、将辨识的线性部分与辨识的非线性部分结合,获得辨识的恒力接触系统模型,完成对恒力接触系统的辨识。2.根据权利要求1所述的恒力接触系统的辨识方法,其特征在于,步骤一中的所述恒力接触系统模型的动力学方程如下:其中,f表示电机(1)的驱动力、t表示摆臂(5)的拉力、θ表示摆臂(5)与铅垂线的夹角且θ<5
°
、f
f
表示滑块(3)所受的摩擦力、f
s
表示弹簧向摆臂(5)施加的弹力、m表示恒力接触系统的质量、x表示滑块(3)运动的位移、表示x的一阶微分即速度、表示x的二阶微分即加速度、l表示摆臂(5)的长度、g表示重力系数、c表示阻尼系数、f0表示库伦摩擦、sgn(
·
)表示符号函数、k表示弹簧(6)的劲度系数、f0表示弹簧(6)一直处于压缩状态时的常力;将公式一整理后如下:
其中,k0=mg/l-k;并且,k0、f0、c和f0均为常数项。3.根据权利要求2所述的恒力接触系统的辨识方法,其特征在于,步骤二具体如下:步骤二一、在滑块(3)做匀速运动前提下,将公式二变换为:其中,f
ab
表示将滑块(3)从横梁(4)上a点移动到b点的电机(1)的驱动力,f
ba
表示将滑块(3)从横梁(4)上b点移动到a点的电机(1)的驱动力;步骤二二、当滑块(3)的两次运动速度大小相同、方向相反时,将公式三变换为:f
ab
f
ba
=2k0x-2f0公式四步骤二三、通过测量滑块(3)不同的位移x,利用公式四联立解方程组求得k0、f0;通过测量滑块(3)不同的运动速度利用公式五联立解方程组求得c、f0。4.根据权利要求3所述的恒力接触系统的辨识方法,其特征在于,步骤三具体如下:步骤三一、在公式二中引入补偿误差以及未知干扰,则有:其中、f
*
表示期望力;f
c
表示用来补偿的补偿力、且表示补偿误差,d表示未知干扰;步骤三二、引入辅助变量且得到非线性干扰观测器的表达式如下:其中,表示非线性干扰观测器观测到的观测干扰,表示的一阶微分,表示与位移、速度有关的设定量。5.根据权利要求4所述的恒力接触系统的辨识方法,其特征在于,步骤四具体如下:步骤四一、将非线性干扰观测器引入恒力接触系统模型,对公式六进行改写得到名义线性模型:步骤四二、对名义线性模型进行拉普拉斯变换得到:其中,x
*
(s)表示对x的拉普拉斯变换,f
*
(s)表示对f
*
的拉普拉斯变换;步骤四三、向恒力接触系统施加不同频率的正弦期望电流,同时施加补偿电流,得到恒力接触系统响应,并通过恒力接触系统响应计算得到恒力接触系统的波特图,再依据恒力接触系统的波特图,解算出拉普拉斯变换后名义线性模型中的参数。
6.根据权利要求5所述的恒力接触系统的辨识方法,其特征在于,步骤五中对rbf神经网络进行训练的具体方法如下:选定rbf神经网络的输入为:设置离线训练的损失函数为:其中,k为输入/输出的序数,α>0,n表示用来训练的样本数量,表示rbf神经网络的输出与实际误差之间的差值,δp(k)=p(k 1)-p(k)表示两次迭代之间的误差,b=1,2,
…
,n表示训练样本的数量,e(k)=x
*
(k)-x(k)表示名义线性模型的输出x
*
(k)和恒力接触系统的输出x(k)之间的实际误差。7.根据权利要求6所述的恒力接触系统的辨识方法,其特征在于,rbf神经网络的停止训练条件为损失值loss小于10-4
。8.根据权利要求3所述的恒力接触系统的辨识方法,其特征在于,横梁(4)上a点到o点的距离为ao=13mm,o点到b点的距离为移ob=15mm;o点为滑块(3)的运动原点。摆臂(5)的长度为l=340mm。9.根据权利要求1或5所述的恒力接触系统的辨识方法,其特征在于,补偿电流的获取方法如下s1、控制滑块(3)分别以不同速度进行匀速运动;所述匀速运动包括正向匀速运动和反向匀速运动,测量并分别得到正向匀速运动和反向匀速运动的电流和位移关系图;所述正向匀速运动为从a点移动到b点的匀速运动,所述反向匀速运动为从b点移动到a点的匀速运动;s2、分别计算出正向匀速运动和反向匀速运动的电流和位移关系图对应的斜率和截距,得到正向匀速运动对应的第一电流和反向匀速运动对应的第二电流,取第一电流和第二电流平均值作为补偿电流。10.根据权利要求9所述的恒力接触系统的辨识方法,其特征在于,滑块(3)进行匀速运动的速度分别为:5mm/s、8mm/s、10mm/s、12.5mm/s、15mm/s、17.5mm/s、20mm/s和22.5mm/s。
技术总结
本发明提供的一种恒力接触系统的辨识方法涉及对带有非线性因素的恒力接触系统的辨识方法,目的是为了克服实际恒力接触系统包含非线性因素,使得恒力接触系统的辨识不够准确的问题,其中恒力接触系统包括:电机的动力输出轴与丝杠的一端传动连接,用于带动丝杠旋转;丝杠与滑块的下方螺旋配合,用于带动滑块沿丝杠的长轴移动;滑块的上方悬挂在横梁上,用于通过滑块带动横梁移动;摆臂的数量为两条且平行设置,两条摆臂的底端分别与横梁的两端铰接,两条摆臂的顶端分别与机架铰接;使得横梁移动时带动摆臂的底端移动,从而带动摆臂的顶端绕对应的轴旋转;弹簧的一端与一条摆臂的侧壁固定,另一端与机架固定;且弹簧始终为压缩状态。缩状态。缩状态。
技术研发人员:高会军 安浩 林伟阳 张思宁
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.02.25
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。