1.本发明涉及对带有非线性因素的恒力接触系统的辨识方法。
背景技术:
2.在机器人与工件、人或者其他环境进行交互任务时,恒力接触控制技术一直是亟待解决的难题。恒力接触技术,可以依据被控对象区分为机器人端的恒力接触技术,以及环境端的恒力控制。前者通过对机器人进行阻抗控制、力位混合控制等方式实现,后者则是通过设计一种恒力接触系统来自适应机器人交互时的接触力。卫浴行业的抛光打磨,就是典型的通过自行设计恒力接触系统来完成工件的抛光打磨任务。
3.在抛光打磨任务中,一种方法是将抛光工具用作末端执行器,另一种方法是将物体固定在机器人上,用砂轮进行抛光打磨。前一种情况适用于一些不便于固定在机器人上的大物体,后一种情况更适用于小型物体。为了保证抛光质量,需要对机器人与物体之间的接触力进行感知和控制。恒力接触系统主要由伺服电机、丝杠和滑块组成。滑块悬挂在横梁上,可在伺服电机驱动的丝杠上移动。横梁连接到两个平行的摆臂上。左摆臂与弹簧连接。砂轮机固定在横梁的末端。因此,砂轮的位置会受到滑块的影响,进而影响末端执行器和砂轮之间的打磨力。
4.为了能更好地完成抛光打磨任务,建立准确的恒力接触系统模型是第一步。经典的系统辨识方法,如频域响应法和最小二乘法等,往往被用来辨识线性时不变系统。然而,实际的恒力接触系统往往包含模型不确定性、摩擦等非线性因素,限制了这些方法的使用,使得恒力接触系统的辨识不够准确。
技术实现要素:
5.本发明的目的是为了克服实际恒力接触系统包含非线性因素,使得恒力接触系统的辨识不够准确的问题,提供了一种恒力接触系统的辨识方法。
6.本发明提供的一种恒力接触系统的辨识方法,其中恒力接触系统包括电机、丝杠、滑块、横梁、摆臂、弹簧和机架;
7.电机的动力输出轴与丝杠的一端传动连接,用于带动丝杠旋转;
8.丝杠与滑块的下方螺旋配合,用于带动滑块沿丝杠的长轴移动;
9.滑块的上方悬挂在横梁上,用于通过滑块带动横梁移动;
10.摆臂的数量为两条且平行设置,两条摆臂的底端分别与横梁的两端铰接,两条摆臂的顶端分别与机架铰接;使得横梁移动时带动摆臂的底端移动,从而带动摆臂的顶端绕对应的轴旋转;
11.弹簧的一端与一条摆臂的侧壁固定,另一端与机架固定;且弹簧始终为压缩状态;
12.所述辨识方法具体步骤如下:
13.步骤一、建立恒力接触系统模型;所述恒力接触系统模型包括线性部分和非线性部分;
14.步骤二、控制所述滑块分别以不同速度进行匀速运动,计算得到所述恒力接触系统模型中的常数项;并测得电流和位移的关系,计算得到补偿电流;
15.步骤三、将所述常数项作为非线性干扰观测器的初值以构建非线性干扰观测器;
16.步骤四、通过非线性干扰观测器对所述恒力接触系统进行观测得到观测干扰,将观测干扰引入恒力接触系统模型得到名义线性模型,所述名义线性模型为恒力接触系统模型的线性部分,再通过结合施加补偿电流的频域响应方法对名义线性模型进行辨识;
17.步骤五、通过rbf神经网络对非线性部分进行辨识;
18.所述非线性部分为名义线性模型的输出与恒力接触系统的输出之间的等效误差;所述等效误差为rbf神经网络的输出;
19.步骤六、将辨识的线性部分与辨识的非线性部分结合,获得辨识的恒力接触系统模型,完成对恒力接触系统的辨识。
20.进一步地,步骤一中的所述恒力接触系统模型的动力学方程如下:
[0021][0022]
其中,f表示电机的驱动力、t表示摆臂的拉力、θ表示摆臂与铅垂线的夹角且θ<5
°
、ff表示滑块所受的摩擦力、fs表示弹簧向摆臂施加的弹力、m表示恒力接触系统的质量、x表示滑块运动的位移、表示x的一阶微分即速度、表示x的二阶微分即加速度、l表示摆臂的长度、g表示重力系数、c表示阻尼系数、f0表示库伦摩擦、sgn(
·
)表示符号函数、k表示弹簧的劲度系数、f0表示弹簧一直处于压缩状态时的常力;
[0023]
将公式一整理后如下:
[0024][0025]
其中,k0=mg/l-k;并且,k0、f0、c和f0均为常数项。
[0026]
进一步地,步骤二具体如下:
[0027]
步骤二一、在滑块做匀速运动前提下,将公式二变换为:
[0028][0029]
其中,f
ab
表示将滑块从横梁上a点移动到b点的电机的驱动力,f
ba
表示将滑块从横梁上b点移动到a点的电机的驱动力;
[0030]
步骤二二、当滑块的两次运动速度大小相同、方向相反时,将公式三变换为:
[0031]fab
f
ba
=2k0x-2f0ꢀꢀꢀ
公式四
[0032][0033]
步骤二三、通过测量滑块不同的位移x,利用公式四联立解方程组求得k0、f0;通过测量滑块不同的运动速度利用公式五联立解方程组求得c、f0。
[0034]
进一步地,步骤三具体如下:
[0035]
步骤三一、在公式二中引入补偿误差以及未知干扰,则有:
[0036][0037]
其中、f
*
表示期望力;fc表示用来补偿的补偿力、且表示补偿误差,d表示未知干扰;
[0038]
步骤三二、引入辅助变量且得到非线性干扰观测器的表达式如下:
[0039][0040]
其中,表示非线性干扰观测器观测到的观测干扰,表示的一阶微分,表示与位移、速度有关的设定量。
[0041]
进一步地,步骤四具体如下:
[0042]
步骤四一、将非线性干扰观测器引入恒力接触系统模型,对公式六进行改写得到名义线性模型:
[0043][0044]
步骤四二、对名义线性模型进行拉普拉斯变换得到:
[0045][0046]
其中,
[0047]
步骤四三、向恒力接触系统施加不同频率的正弦期望电流,同时施加补偿电流,得到恒力接触系统响应,并通过恒力接触系统响应计算得到恒力接触系统的波特图,再依据恒力接触系统的波特图,解算出拉普拉斯变换后名义线性模型中的参数。
[0048]
进一步地,步骤五中对rbf神经网络进行训练的具体方法如下:
[0049]
选定rbf神经网络的输入为:
[0050][0051]
设置离线训练的损失函数为:
[0052][0053]
其中,k为输入/输出的序数,α>0,n表示用来训练的样本数量,表示rbf神经网络的输出与实际误差之间的差值,δp(k)=p(k 1)-p(k)表示两次迭代之间的误差,b=1,2,
…
,n表示训练样本的数量,e(k)=x
*
(k)-x(k)表示名义线性模型的输出x
*
(k)和恒力接触系统的输出x(k)之间的实际误差。
[0054]
进一步地,rbf神经网络的停止训练条件为损失值loss小于10-4
。
[0055]
进一步地,横梁上a点到o点的距离为ao=13mm,o点到b点的距离为移ob=15mm;o点为滑块的运动原点。
[0056]
摆臂的长度为l=340mm。
[0057]
进一步地,补偿电流的获取方法如下
[0058]
s1、控制滑块分别以不同速度进行匀速运动;所述匀速运动包括正向匀速运动和反向匀速运动,测量并分别得到正向匀速运动和反向匀速运动的电流和位移关系图;所述正向匀速运动为从a点移动到b点的匀速运动,所述反向匀速运动为从b点移动到a点的匀速运动;
[0059]
s2、分别计算出正向匀速运动和反向匀速运动的电流和位移关系图对应的斜率和截距,得到正向匀速运动对应的第一电流和反向匀速运动对应的第二电流,取第一电流和第二电流平均值作为补偿电流。
[0060]
进一步地,滑块进行匀速运动的速度分别为:5mm/s、8mm/s、10mm/s、12.5mm/s、15mm/s、17.5mm/s、20mm/s和22.5mm/s。
[0061]
本发明的有益效果是:
[0062]
本发明提出一种恒力接触系统的辨识方法,将系统分为线性部分和非线性部分分别辨识。依据匀速运动的方法得到部分参数的初步估计值,作为干扰观测器中的初值使用;通过非线性干扰观测器结合频域响应辨识的方法辨识出二阶名义线性模型;非线性部分则由rbf辨识得到。通过将线性部分和非线性部分结合,得到恒力接触系统的准确模型,对高质量完成抛光打磨任务提供基础。
附图说明
[0063]
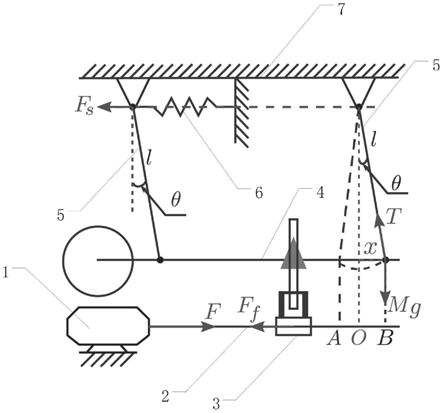
图1为本发明的恒力接触系统模型;
[0064]
图2为速度控制器框图;
[0065]
图3为带有干扰观测器的系统框图;
[0066]
图4为rbf神经网络的结构示意图;
[0067]
图5为带有rbf神经网络辨识的系统结构框图;
[0068]
图6为匀速运动时电流与位置的关系图;
[0069]
图7为频域响应测试图;
[0070]
图8为恒力接触系统的波特图;
[0071]
图9为恒力接触系统辨识结果的验证图。
具体实施方式
[0072]
为了得到恒力接触系统的准确模型,先用一种干扰观测器结合频域响应辨识法得到系统的线性模型;为了得到系统非线性部分的模型,考虑到rbf(radial basis function,径向基函数)神经网络是用来建立系统输入与输出之间非线性映射关系的一种有效手段,这与系统辨识的目标是一致的,因此,用rbf神经网络对系统的非线性部分进行辨识。
[0073]
步骤1:对恒力接触系统进行机理建模:
[0074]
依据恒力接触系统的实物,可以将其运动机理简化为图1所示的模型。恒力接触系统中,滑块3会从a点开始运动通过原点o再到达终点b,然后再从b返回a。如图1所示,l表示摆臂5的长度,θ表示摆臂5的夹角且满足θ<5
°
,f表示伺服电机1的驱动力,ff表示滑块3运
动时所受的摩擦力,fs表示弹簧向摆臂5施加的弹力,t表示摆臂5的拉力;x表示滑块3运动的位移,o为滑块3运动原点,此时摆臂5处于竖直状态。据此,可以建立恒力接触系统的动力学方程如下:
[0075][0076]
式中,m表示系统的质量,k表示弹簧6的劲度系数,c表示阻尼系数,f0表示库伦摩擦,sgn(
·
)表示符号函数。因为弹簧一直处于压缩状态,因此可以认为弹簧原先的平衡点发生了位移,并一直有一个常力f0。上式可以改写为:
[0077][0078]
式中,k0=mg/l-k。
[0079]
步骤2:匀速运动初步估计系统模型中的常数项:
[0080]
采用匀速运动的方法可以辨识式中的部分参数。通过设计图2所示的速度控制器,使得滑块做匀速运动。此时,因为从a到b和从b到a运动时摩擦力方向相反,因此式可以改写为:
[0081][0082]
当滑块的两次运动速度大小相同、方向相反时,通过将式中的两个式子相加、减分别得到式、。
[0083]fab
f
ba
=2k0x-2f0ꢀꢀꢀ
(4)
[0084][0085]
通过多次测量,利用式可以联立解方程组求得k0,f0。通过对滑块不同的运动速度测量,利用式可以求得c,f0。
[0086]
步骤3:非线性干扰观测器设计:
[0087]
上述步骤的匀速运动得到的是一个估计值,不能完全反映系统的真实模型,为了得到系统的真实模型,可以先设计非线性干扰观测器来观测系统中非线性扰动。由于加速度不可测得,对位置进行二次微分得到的加速度信号会引入较大的噪声,因此,有必要设计一种不含加速度信号的干扰观测器对系统的干扰进行观测。
[0088][0089]
式中,f
*
表示期望力,fc表示补偿力来补偿d表示其他未知干扰。令d表示补偿误差以及未知干扰,式可改写为
[0090][0091]
式中,此时的系统结构可用图3所示。
[0092]
引入辅助变量引入辅助变量表示观测到的干扰,且可以设计如下的干扰观测器:
[0093][0094]
令表示观测误差。一般来说,对于d并没有先验信息,可以认为因此,对e求导,有
[0095][0096]
式说明通过选择恰当的所设计的干扰观测器使渐近稳定的,表示人为设计的一个仅与位移、速度有关的设定量。
[0097]
步骤4:频域响应辨识系统线性模型:
[0098]
利用步骤3所设计的非线性干扰观测器,可将系统模型改写为:
[0099][0100]
名义线性模型通过拉普拉斯变换可得:
[0101][0102]
式说明恒力接触系统的名义线性模型为二阶系统。通过向系统施加不同频率的正弦波可以得到不同的激励响应,由此绘制波特图可以得到系统的线性模型参数。
[0103]
步骤5:采用rbf辨识系统非线性模型:
[0104]
rbf神经网络结构如图4所示,其输入为隐含层神经元输出为隐含层第j个神经元的输出如式所示,网络的输出如式所示。
[0105][0106][0107]
式中cj为第j个神经元的中心点,σj为高斯核的宽度,||x
i-cj||表示第i个输入与中心点的欧氏距离。式中隐含层到输出层之间的连接权重利用rbf进行系统非线性部分辨识的框图如图5所示。定义名义线性模型的输出x
*
(k)和实际伺服系统的输出x(k)之间的误差为
[0108]
e(k)=x
*
(k)-x(k)
ꢀꢀꢀ
(14)
[0109]
定义表示rbf神经网络输出与实际误差之间的差值。定义δp(k)表示两次迭代之间的误差。
[0110]
δp(k)=p(k 1)-p(k)
ꢀꢀꢀ
(15)
[0111]
设置离线训练的损失函数为
[0112][0113]
式中α>0,n表示用来训练的样本数量。令q∈{cj,σj,wj},j=1,2,
···
,m表示rbf神经网络待更新的参数,则其更新律可以定义为
[0114][0115]
式中η表示学习因子,其更新方式为
[0116][0117]
下面结合附图和实施例子,对本发明的具体实施方式作详细阐述。
[0118]
步骤一:建立恒力接触系统模型。测量恒力接触系统的参数,确定滑块的运动范围为[-13,15]mm,即ao=13mm,ob=15mm;摆臂的长度为l=340mm。依据系统的运动规律将系统简化为图1所示的模型。
[0119]
步骤二:匀速运动参数辨识。依据图2所示的速度控制框图,通过设计pid控制器,使得系统进行匀速运动。令滑块的速度分别为:5,8,10,12.5,15,17.5,20,22.5(mm/s),测得电流和位移的关系如图6所示。依据图6,分别计算出正反方向对应的斜率和截距,取平均值作为补偿电流。
[0120]
步骤三:非线性干扰观测器设计。设计一种不包含加速度的非线性干扰观测器,适当选取参数使得观测器能稳定观测系统的非线性特性。
[0121]
步骤四:频域响应辨识系统名义线性模型。如图7(a)所示,向系统施加不同频率的正弦期望电流,同时施加步骤二得到的补偿电流,得到图7(b)所示的系统响应。正弦期望电流的频率从低到高逐渐增大,由系统响应计算系统的幅频特性和相频特性,得到系统的波特图如图8所示。依据系统的波特图,可以得出名义线性模型为:
[0122][0123]
对比式知:m=1.276,c=2.392,k0=38.517。i
*
为频域响应激励电流,包括正弦期望电流和叠加的补偿电流,与期望力f
*
正相关。
[0124]
步骤五:rbf辨识系统非线性部分。依据图5所示的系统框图,选定网络的输入为采用式作为损失函数,设置停止训练的条件为loss小于10-4
。为了验证所提辨识方法的正确性,可以将名义线性模型和非线性模型组合起来验证。在激励信号的作用下,恒力接触系统的响应如图9所示。结果表明名义模型与实际系统之间清晰存在非线性误差,通过引入rbf的非线性辨识结果,所建立的系统模型可以很好地预测实际系统的输出。
[0125]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本领域的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。