用于准备滑雪道的履带式车辆和控制履带式车辆的绞盘的方法
1.相关申请的交叉引用
2.本专利申请要求于2020年11月24日提交的意大利专利申请第102020000028169号的优先权,其全部公开内容通过引用并入本文。
技术领域
3.本发明涉及一种用于准备滑雪道的履带式车辆。
背景技术:
4.通常,上述类型的履带式车辆包括:框架;安装在框架上的驾驶室;安装在框架上的推进系统;由推进系统驱动的驱动轮;以及推进系统提供的工具。
5.当履带式车辆用于准备特别陡峭的滑雪道时,履带式车辆配备有安装在框架上的绞盘并包括臂,臂被配置为引导绞盘的绳索并围绕确定轴线相对于框架选择性地定向绞盘的绳索。
6.通常,当绞盘的绳索的自由端部未锚定到履带式车辆之外的点时,臂围绕确定轴线旋转以控制臂。通常,当绳索处于张力下时,臂可以自由地围绕轴线定向其自身,因此在这种构造中的臂与绳索的在臂外部的部分成一直线。
7.当绳索施加在履带式车辆上的力的方向不通过履带式车辆的重心时,该力向履带式车辆施加横摆扭矩。为了克服此缺点,文献ep1,896,661教导了如何通过施加到臂上的扭矩来自动补偿横摆扭矩,从而将臂布置在确定位置,在该位置,绳索在履带式车辆外的延长部分与履带式车辆的重心成一直线。理论上,以这种方式,横摆扭矩被消除。
8.横摆扭矩的自动补偿用于获取臂围绕确定轴线相对于框架的角度和横摆扭矩的大小,以便计算和自动应用校正扭矩,从而至少部分地补偿横摆扭矩。
9.横摆扭矩的自动补偿的应用限制了其可能的有益用途。
技术实现要素:
10.本发明的一个目的是提供一种用于准备滑雪道的履带式车辆,其减少了本文强调的已知技术的缺点。
11.根据本发明,实现了一种用于准备滑雪道的履带式车辆;履带式车辆包括:
[0012]-框架;
[0013]-安装在框架上的绞盘,该绞盘用于选择性地展开和缠绕绳索,该绳索能够锚定到履带式车辆之外的点;
[0014]-臂,其安装成围绕确定轴线相对于框架旋转并被配置为引导绳索;
[0015]-围绕确定轴线的臂的致动系统;
[0016]-臂的致动系统的控制装置,该控制装置用于在以下操作模式中选择操作模式:
[0017]-当绳索处于张力下时,允许臂围绕确定轴线自由旋转;
[0018]-当绳索处于张力下时,使臂围绕确定轴线旋转;
[0019]-当绳索处于张力下时,锁定臂相对于框架的位置。
[0020]
以这种方式,可以在任何操作步骤中控制横摆扭矩并在必要时将其用于驱动履带式车辆。
[0021]
特别地,致动系统包括至少一个致动器,致动器与臂耦合以选择性地将围绕确定轴线的扭矩传递到臂,从而选择性地致动一种所述操作模式。
[0022]
更具体地,至少一个致动器被配置为传递最小值和最大值之间的可变扭矩,以调整传递到臂的扭矩。
[0023]
实际上,至少一个致动器是被供应在最小值和最大值之间变化的压力的双向流动的液压马达。
[0024]
以这种方式,可以选择性地改变传递到臂的扭矩的方向。
[0025]
为了控制至少一个液压马达,致动系统包括由压力源供应的液压回路并且包括压力调节阀,以调节由至少一个致动器传递的力。
[0026]
特别地,致动系统包括用于每个液压马达的方向控制阀,以选择性地除去对相应的液压马达的供应或在第一流动方向上供应相应的液压马达或在与第一流动方向相反的第二流动方向上供应相应的液压马达。
[0027]
以这种方式,同时可以选择性地消除由至少一个致动器传递到臂的扭矩和/或选择性地改变该扭矩的方向以控制履带式车辆的转向。
[0028]
特别地,控制装置被配置为手动控制压力调节阀和控制方向控制阀。
[0029]
以这种方式,履带式车辆的操作者可以手动控制致动系统并设置期望的操作模式。
[0030]
特别地,控制装置包括操纵杆,以允许履带式车辆的操作者以简单而直观的方式控制致动系统。
[0031]
特别地,致动系统包括两个致动器。以这种方式,可以将围绕确定轴线沿相反方向的相应的扭矩传递到臂。
[0032]
本发明的另一个目的是提供一种控制履带式车辆的绞盘的方法,该方法减少了本文强调的已知技术的缺点。
[0033]
根据本发明,提供了一种控制上述履带式车辆的绞盘的方法,该方法包括:
[0034]-通过每个致动器向臂施加与另一个致动器施加的最小扭矩相反的最小扭矩,以允许臂与绳索成一直线。
[0035]
由于这种方法,可以允许臂围绕确定轴线自由旋转。
[0036]
根据本发明,提供了另外的控制上述履带式车辆的绞盘的方法,该方法包括:
[0037]-通过至少一个致动器施加扭矩以使臂围绕所述确定轴线旋转。
[0038]
以这种方式,可以控制履带式车辆的转向,并且能够向臂施加方向与横摆扭矩相反的扭矩以有利于转向。
[0039]
根据本发明,提供了另外的控制上述履带式车辆的绞盘的方法,该方法包括:
[0040]-通过每个致动器向臂施加与另一个致动器施加的最大扭矩相反的最大扭矩。
[0041]
以这种方式,可以锁定臂相对于框架的位置。在履带式车辆下坡移动的情况下,这种方法允许将履带式车辆与前进方向保持成一直线,从而防止履带式车辆横摆。
附图说明
[0042]
根据以下参照附图对非限制性示例实施方式的描述,本发明的另外的特征和优点将变得清楚,在附图中:
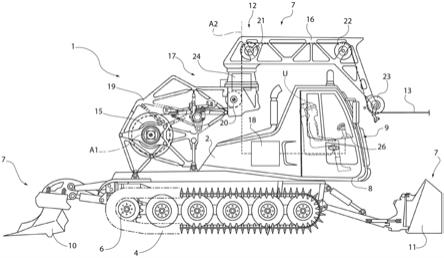
[0043]-图1是根据本发明实现的履带式车辆的侧视图,其中为了清楚起见去除了一些部件并具有示意性部件;
[0044]-图2和图3是图1的履带式车辆在相应的操作构造中的俯视图,其中为了清楚起见去除了一些部件并具有示意性部件;并且
[0045]-图4是图1的履带式车辆的细节的示意图。
具体实施方式
[0046]
参照图1,附图标记1总体上表示用于准备滑雪道的履带式车辆。履带式车辆1包括:框架2;履带3(图2和图3);履带4;相互独立且分别与履带3(图2和图3)和履带4耦合的驱动轮5(图2和图3)和驱动轮6;被液压致动并与框架2连接的多个工具7;安装在框架2上的驾驶室8;以及布置在驾驶室8内的用户界面9。
[0047]
特别地,工具7包括:以可移动方式与框架2连接的铣刨机(miller)10;以可移动方式与框架2连接的铲斗11;以及安装在框架2上的绞盘12,该绞盘用于选择性地展开和缠绕绳索13,绳索13能够锚定到履带式车辆1之外的点14(图2和图3)。
[0048]
根据本发明的非限制性实施方式,驾驶室8布置在履带式车辆1的前部并面对铲斗11。在这种构造中,绞盘12包括卷筒15,卷筒15围绕旋转轴线a1旋转以展开和缠绕绳索13,并且布置在驾驶室8后面的履带式车辆1的后部。
[0049]
此外,履带式车辆1包括:臂16,臂16安装成围绕确定轴线a2相对于框架2旋转,并被配置为引导绳索13;围绕确定轴线a2的臂16的致动系统17;以及臂16的致动系统17的控制装置18,控制装置18用于在绳索13处于张力下时选择性地设置以下操作模式之一:
[0050]-允许臂16围绕确定轴线a2自由旋转;
[0051]-使臂16围绕确定轴线a2旋转;
[0052]-锁定臂16相对于框架2的位置。
[0053]
更具体地,履带式车辆1包括:固定到框架2上的支撑结构19,该支撑结构支撑绞盘12的卷筒15并以旋转方式支撑臂16;以及一系列惰轮20、21、22和23,它们以旋转方式安装在支撑结构19和臂16上并具有沿着确定路径引导绳索13的功能。
[0054]
致动系统17包括与臂16耦合的两个致动器24和25(图2和图3),用于选择性地将围绕确定轴线a2的相应的扭矩传递到臂16。
[0055]
根据另外的实施方式,致动器的数量可以变化,并且不应被理解为对本发明的限制。举例来说,致动系统17可以包括单独一个致动器,或者包括四个致动器。
[0056]
控制装置18使用用户界面9来允许履带式车辆1的操作者u控制致动系统17,并包括可由所述操作者u控制的操纵杆26。
[0057]
参照图2和图3,履带式车辆1具有重心c,其布置在与确定轴线a2相距一定距离处。
[0058]
在本文描述和图示的情况下,致动器24和25由支撑结构19支撑,并且相对于臂16布置在相对两侧。
[0059]
特别地,致动器24和25是双向流动的液压马达,给它们供应在最小值和最大值之
间可变的压力,以传递最小值和最大值之间的可变扭矩。
[0060]
参照图4,致动系统17包括由压力源28供应的液压回路27,并且包括用于在最小值和最大值之间调节每个致动器24和25的供应压力的压力调节阀29。
[0061]
此外,致动系统17包括方向控制阀30和方向控制阀31,其中每一个被配置为选择性地除去对相应的致动器24、25的供应或在第一流动方向上供应相应的致动器24、25或在与第一流动方向相反的第二流动方向上供应相应的致动器24、25。
[0062]
特别地,致动系统包括控制模块32、33和34,它们被配置为根据操纵杆26给出的命令和选择的操作模式分别控制压力调节阀29、方向控制阀30和方向控制阀31。
[0063]
更具体地,每个控制模块32、33、34被配置为控制相应的阀29、30、31,以使由操纵杆26给出的命令给致动器24和25供应适合于所选择的操作模式的压力和流动方向。
[0064]
在使用中并参照图2,当绳索13处于张力下时,履带式车辆1的操作者u通过操纵杆26根据特定的操作需要和驾驶感觉选择期望的操作模式。
[0065]
为了允许臂16围绕确定轴线a2自由旋转,为了使臂16与绳索13的在臂16外部的部分成一直线,履带式车辆1的操作者u控制操纵杆26,致动压力调节阀29(图4),以通过每个致动器24、25向臂16施加与由另一个致动器24、25施加的最小扭矩相反的最小扭矩。
[0066]
在履带式车辆1的操作者u想要补偿处于张力下的绳索13施加在履带式车辆1上的横摆扭矩时,所述操作者u控制操纵杆26以通过压力调节阀29(图4)调节每个致动器24、25施加在臂16上的扭矩强度,并通过每个方向控制阀30、31(图4)调节由相应的致动器24、25施加在臂16上的扭矩的方向。在这样的情况下,致动器24和25在臂16上施加与横摆扭矩方向一致的扭矩,并且臂16围绕确定轴线a2旋转,以使绳索13的在臂16外部的部分与履带式车辆1的重心c基本上成一直线。操作者重复该操作,直到操作者认为有必要为止。
[0067]
参照图3,在履带式车辆1的操作者u想要沿期望的转向方向驾驶履带式车辆1的情况下,所述操作者u控制操纵杆26,使得致动器24和25在臂16上施加与所需转向方向相反并具有手动调节的强度的扭矩。在这种情况下,使臂16围绕确定轴线a2旋转,以跟随履带式车辆1围绕重心c的横摆。
[0068]
在履带式车辆1的操作者u想要沿大致直线方向向前移动履带式车辆1的情况下,所述操作者u控制操纵杆26以通过每个致动器24、25向臂16施加与由另一个致动器24、25施加的最大扭矩相反的这种最大扭矩。更具体地,调节压力调节阀29(图4)以向致动器24和25供应最大压力,并调节方向控制阀30和31(图4)使得各致动器24和25在臂16上施加相反方向的扭矩。在这种情况下,臂16在履带式车辆1的向前方向上基本上相对于框架2被锁定。上述操作模式特别地在履带式车辆1下坡的情况下被指出,允许将履带式车辆1与向前方向保持成一直线并防止履带式车辆1的不必要的横摆。
[0069]
显然,可以在不脱离所附权利要求的保护范围的情况下做出本发明的变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。