1.本发明属于路面检测技术领域,尤其涉及一种路面裂纹检测车及导航方法。
背景技术:
2.传统的路面裂纹检测需要耗费大量的人力物力,不仅需要现场有很多道路勘探员以及测绘师进行测量和记录,而且需要用到很多测量仪器和工具,十分费时费力。在某些裂纹比较大,道路被破坏的比较严重的路面,检测人员在检测时甚至可能会发生路面崩塌等危险现象,威胁着检测人员的安全。
3.随着科技的进步,出现了车载路面裂纹检测系统,但是,这仍然需要人在里面进行操作,并不能实现完全自动化,也没有把路面崩塌所带来的危险解除。现有的道路裂纹检测系统仅生成裂纹检测报告,无法即时且直观的显示出整个路面的裂纹信息,不便于后续修补以及重建工作的进行。
技术实现要素:
4.本发明要解决的技术问题是提供一种路面裂纹检测车及导航方法,以解决现有道路裂纹检测系统仍需人在内部进行操作的问题。
5.为解决上述问题,本发明的技术方案为:
6.本发明的一种路面裂纹检测车,包括:
7.检测车本体,用于进行自主移动;
8.扫描检测单元,设于所述检测车本体的底部,用于收集道路图片信息;
9.主动感知识别单元,设于所述检测车本体上,用于检测所述检测车本体周围的环境信息;
10.车载控制系统,设于所述检测车本体上并与所述扫描检测单元信号连接,用于控制所述检测车本体进行移动以及接收所述道路图片信息;
11.控制部,设于所述检测车本体上,与所述车载控制系统信号连接,用于接收所述道路图片信息并形成完整路面信息;所述控制部与所述主动感知识别单元和车载控制系统信号连接,用于接收所述环境信息并根据所述环境信息输出路径控制信息至所述车载控制系统或输出紧急控制信息至所述主动感知识别单元;
12.还包括远程监控装置,与所述控制部信号连接,用于显示所述完整路面信息;
13.其中,所述控制部对接收到的所述道路图片信息进行裂纹分析以及进行标注处理,并将分析完成且标注好的所述道路图片信息进行图像拼接,得到对道路表面的整个虚拟模型进行展示的所述完整路面信息。
14.本发明的路面裂纹检测车,所述扫描检测单元上设有辅助照明设备。
15.本发明的路面裂纹检测车,所述检测车车体包括车本体和设于所述车本体底部的若干自由驱动轮。
16.本发明的路面裂纹检测车,所述自由驱动轮包括设于所述车本体底部的辅助转动
电机、设于所述辅助转动电机上的驱动装置以及设于所述驱动装置的输出端上的滚轮。
17.本发明的路面裂纹检测车,所述控制部包括裂纹检测单元、小车控制单元和绘图显示单元;
18.所述裂纹检测单元分别与所述扫描检测单元和所述绘图显示单元信号连接,用于对接收到的所述道路图片信息进行裂纹分析以及进行标注处理并输出至所述绘图显示单元;
19.所述小车控制单元分别与所述主动感知识别单元和车载控制系统信号连接,用于接收所述环境信息并根据所述环境信息输出路径控制信息至所述车载控制系统或输出紧急控制信息至所述主动感知识别单元;
20.所述绘图显示单元与远程监控装置信号连接,用于接收经过标注处理的所述道路图片信息并进行图像拼接,得到对道路表面的整个虚拟模型进行展示的所述完整路面信息,并输出至所述远程监控装置。
21.本发明的路面裂纹检测车,还包括存储单元,所述存储单元分别与所述车载控制单元和所述扫描检测单元信号连接,用于存储所述道路图片信息并输出至所述车载控制单元。
22.本发明的路面裂纹检测车,所述扫描检测单元的底部为高清摄像头。
23.本发明的路面裂纹检测车,所述主动感知单元包括全角摄像头和储存单元,所述储存单元分别与所述全角摄像头和所述控制部信号连接。
24.本发明的一种导航方法,应用于上述任意一项所述的路面裂纹检测车,其特征在于,包括以下步骤:
25.步骤s1:检测所述检测车本体周围的环境信息;
26.步骤s2:如所述环境信息中出现障碍物则控制所述检测车本体紧急停止;
27.步骤s3:预设时间后,重新检测所述检测车本体周围的环境信息;
28.步骤s4:如障碍物消失,则所述检测车本体重新开始工作;如障碍物未消失,则重新规划所述检测车本体的规划路径并开始工作。
29.本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
30.本发明一实施例通过在检测车本体上设置扫描检测单元、主动感知识别单元、车载控制系统、控制部,并设置远程监控装置;由车载控制系统控制检测车本体进行自主移动,并设置主动感知识别单元对检测车本体周围的环境信息进行采集,从而实现避障;设置扫描检测单元在检测车本体的底部,收集下方经过的道路图片信息并输出至车载控制系统,由车载控制系统输出至控制部对道路图片信息进行裂纹分析以及进行标注处理,并将分析完成且标注好的道路图片信息进行图像拼接,得到对道路表面的整个虚拟模型进行展示的完整路面信息,从而可通过远程监控装置对完整路面信息进行展示。一是替代了人驾驶的检测车,节省了人力、物力,又避免了检测时危险的发生,解决了现有道路裂纹检测系统仍需人在内部进行操作的问题;二是可即时生成完整且直观的道路表面裂纹信息图,不仅节省了后续数据分析工作的时间,使得修补或者重建任务变得轻松,还简化了测量过程,减少了测量设备的使用,进一步节省了人力、物力。
附图说明
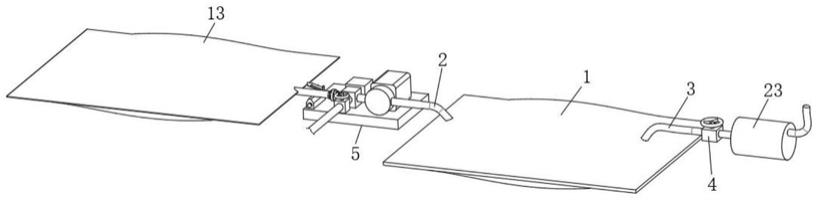
31.图1为本发明的路面裂纹检测车的示意图;
32.图2为本发明的路面裂纹检测车的另一示意图;
33.图3为本发明的路面裂纹检测车的另一示意图;
34.图4为本发明的路面裂纹检测车的检测方法的流程图;
35.图5为本发明的路面裂纹检测车的导航方法的流程图。
36.附图标记说明:1:检测车本体;101:自由驱动轮;102:主动感知识别单元;103:处理控制单元;104:车载控制系统;105:扫描检测单元;2:远程监控装置。
具体实施方式
37.以下结合附图和具体实施例对本发明提出的一种路面裂纹检测车及导航方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
38.参看图1至图3,在一个实施例中,一种路面裂纹检测车,包括检测车本体1、扫描检测单元105、主动感知识别单元102、车载控制系统104、控制部和远程监控装置2
39.检测车本体1用于进行自主移动。扫描检测单元105设于检测车本体1的底部,用于收集道路图片信息。主动感知识别单元102设于检测车本体1上,用于检测检测车本体1周围的环境信息。车载控制系统104设于检测车本体1上并与扫描检测单元105信号连接,用于控制检测车本体1进行移动以及接收道路图片信息。
40.控制部则是设于检测车本体1上,与车载控制系统104信号连接,用于接收道路图片信息并形成完整路面信息。控制部与主动感知识别单元102和车载控制系统104信号连接,用于接收环境信息并根据环境信息输出路径控制信息至车载控制系统104或输出紧急控制信息至主动感知识别单元102。
41.远程监控装置2则是与控制部信号连接,用于显示完整路面信息。
42.其中,控制部用于对接收到的道路图片信息进行裂纹分析以及进行标注处理,并将分析完成且标注好的道路图片信息进行图像拼接,得到对道路表面的整个虚拟模型进行展示的完整路面信息。
43.本实施例通过在检测车本体1上设置扫描检测单元105、主动感知识别单元102、车载控制系统104、控制部,并设置远程监控装置2。由车载控制系统104控制检测车本体1进行自主移动,并设置主动感知识别单元102对检测车本体1周围的环境信息进行采集,从而合理规划运行路线,实现避障。设置扫描检测单元105在检测车本体1的底部,收集下方经过的道路图片信息并输出至车载控制系统104,由车载控制系统104输出至控制部对道路图片信息进行裂纹分析以及进行标注处理,并将分析完成且标注好的道路图片信息进行图像拼接,得到对道路表面的整个虚拟模型进行展示的完整路面信息,从而可通过远程监控装置2对完整路面信息进行展示。一是替代了人驾驶的检测车,节省了人力、物力,又避免了检测时危险的发生,解决了现有道路裂纹检测系统仍需人在内部进行操作的问题。二是可即时生成完整且直观的道路表面裂纹信息图,基于图像的裂纹识别以及裂纹属性分析算法以及图像拼接融合显示算法,结合道路的模型与裂纹的属性(即长度、宽度等信息),不仅节省了后续数据分析工作的时间,使得修补或者重建任务变得轻松,还简化了测量过程,减少了测量设备的使用,进一步节省了人力、物力。
44.下面对本实施例的路面裂纹检测车的具体结构进行进一步说明:
45.在本实施例中,扫描检测单元105上设有辅助照明设备,用于辅助照明消除阴影。其中,扫描检测单元105的底部为高清摄像头,用于扫描路面的信息。
46.在本实施例中,检测车车体包括车本体和设于车本体底部的若干自由驱动轮101。
47.其中,自由驱动轮101包括设于车本体底部的辅助转动电机、设于辅助转动电机上的驱动装置以及设于驱动装置的输出端上的滚轮。辅助转动电机用于带动驱动装置和滚轮在竖直轴线上转动,驱动装置则是驱动滚轮转动,从而带动车本体移动。
48.在本实施例中,控制部具体可包括裂纹检测单元、小车控制单元和绘图显示单元。
49.裂纹检测单元分别与扫描检测单元105和绘图显示单元信号连接,用于对接收到的道路图片信息进行裂纹分析以及进行标注处理并输出至绘图显示单元。
50.小车控制单元分别与主动感知识别单元102和车载控制系统104信号连接,用于接收环境信息并根据环境信息输出路径控制信息至车载控制系统104或输出紧急控制信息至主动感知识别单元102。
51.绘图显示单元与远程监控装置2信号连接,用于接收经过标注处理的道路图片信息并进行图像拼接,得到对道路表面的整个虚拟模型进行展示的完整路面信息,并输出至远程监控装置2。
52.其中,裂纹检测单元内部的裂纹识别算法具体是指道路裂纹图像识别算法,使用训练完成的小规模深度神经网络附加上辅助算法(目前可以采用侧重于目标检测的yolo-v5s辅助加上基于opencv的裂纹裂缝属性检测算法)去检测所拍摄的道路图片,其仅仅通过图像就可以标记出裂纹的位置以及分析出道路裂纹的各种属性,检测完之后将相关的裂纹属性信息标注在原图像的裂纹旁边,绘图显示单元内部的绘制算法具体是图像拼接融合算法,能够将检测标注完的道路图片信息进行拼接、去重、融合,最终让标注了道路裂纹属性信息的完整道路图像直观的显示在远程监控装置2上。
53.车载控制系统104包括导航/引导计算系统、无线通信单元、处理控制单元103,它与自由驱动轮101、扫描检测单元105、主动感知单元相连接,发送扫描检测单元105所收集到的道路图片信息以及主动感知单元搜集到的环境信息给裂纹检测单元和小车控制单元,并且接收小车控制单元的控制信号,经过处理之后控制整个移动检测小车内部的系统运行。
54.在本实施例中,远程监控装置2可类似于一个工业电脑或是笔记本电脑等,用于接收并显示绘图显示单元所反馈过来的测绘信息,根据需要,监控人员也可以通过这一装置对整个系统进行操作。
55.在本实施例中,路面裂纹检测车还包括存储单元,存储单元分别与车载控制单元和扫描检测单元105信号连接,用于存储道路图片信息并输出至车载控制单元。
56.在本实施例中,主动感知单元包括全角摄像头和储存单元,储存单元分别与全角摄像头和控制部信号连接。全角摄像头用于拍摄周围的环境,并将其记录于储存单元之中,其与所述车载控制系统104相连,通过与上位检测控制系统进行通信交互实现主动感知周围环境的功能。
57.下面对本实施例的路面裂纹检测车的操作过程进行说明:
58.人将检测车本体1放置于待测已封路段边缘起始点的封路障前,先通过处理控制
单元103设置好检测车本体1的初始设置,设置完之后通过远程监控装置2输入粗略的路段信息并且启动整个路面裂纹检测车。
59.进一步地,参看图4以及图5,人启动系统后,车载控制系统104根据所测路段的粗略信息先计算规划出检测车本体1的扫描行动路线,接着给检测车本体1的车载控制系统104发出控制信号,车载控制系统104接收到控制信号之后驱动自由驱动轮101按所规划的移动路径进行移动。
60.进一步地,参看图4以及图5,检测车本体1在移动的过程中,其下方的扫描检测单元105持续不断地在同步运行,收集道路的信息,并将其暂存于其内部的储存单元中,车载控制系统104将其储存的道路信息不断地发送给裂纹检测单元,裂纹检测单元对所接收到的道路信息进行裂纹分析并进行标注处理,同时由绘图显示单元将已经分析完并且标注好的图片进行图像拼接,对道路表面的整个虚拟模型进行拼接还原,并且还会即时的与远程监控装置2进行数据的交互,让检测车本体1的行进状态以及所拼接的道路表面模型在远程监控装置2上进行即时的显示。
61.进一步地,参看图4以及图5,当检测车本体1跑完整个路面之后即扫描完路面信息并且到达所测路段结束点的封路障处,扫描检测单元105以及控制部内的裂纹检测单元和绘图显示单元检测处理完所有道路图片信息并且还原完整个路面的虚拟模型,当路面图片信息不再刷新,小车控制单元就给车载控制系统104发出停止信号,车载控制系统104就控制检测车本体1停止移动。
62.进一步地,参看图4以及图5,当检测车本体1停止移动后,绘图显示单元通过与远程监控装置2进行数据的交互,将已经检测处理、分析标注、拼接还原完之后的道路表面面虚拟模型图显示在其上。
63.实施例二
64.本实施例提供一种导航方法,应用于上述实施例一中的路面裂纹检测车,其特征在于,包括以下步骤:
65.步骤s1:检测检测车本体1周围的环境信息。
66.步骤s2:如环境信息中出现障碍物则控制检测车本体1紧急停止。
67.步骤s3:预设时间后,重新检测检测车本体1周围的环境信息。
68.步骤s4:如障碍物消失,则检测车本体1重新开始工作。如障碍物未消失,则重新规划检测车本体1的规划路径并开始工作。
69.即在整个搬运工作实行的过程中,主动感知识别单元102通过全角摄像头对小车的周围进行全程监控,对周围的环境进行“感知”,并将其发送给小车控制单元,小车控制单元如果识别到周围有动物或者其它障碍物突然出现的情况,就可以发送控制信息给车载控制系统104控制检测车本体1进行紧急停止,等待一段时间如果检测到障碍物消失则重新控制检测车本体1重新工作,如果障碍物不消失则通过改变路径规划控制检测车本体1进行导航规避,如果是前方本来就有障碍物,小车控制单元就直接将其纳入路径规划让检测车本体1规避障碍物,小车控制单元与远程监控装置2进行数据交互,让结合了小车路径规划轨迹以及小车位置的小车定位监控地图显示在其上。
70.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范
围之内,则仍落入在本发明的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。