1.本发明属于冶金机电一体化工程设备技术领域,具体涉及一种高精度、可靠调节型钢坯定位测量机器人装置。
背景技术:
2.在各大炼钢厂中,钢板坯的精确位置直接影响下游工序的正常运行,现在各大钢厂虽然也用定尺测量系统,但是存在很多故障和误差,且需要人工辅助,这就造成工人劳动强度大,工作环境恶劣,资源浪费等不利因素。
3.火焰清理机在钢板坯进行头部预热的过程中,需要人工对其头部相对于烧嘴的位置进行定位,现通过激光测距机器人装置对钢板坯位置进行定位,代替人工定位。因为激光测距装置工作时的位置位于钢板坯行进的路线上,所以现开发机械手对激光测距装置进行位置移动,实现激光测距装置在未工作时对钢板坯运输进行避让。
4.运用激光测距机器人装置,可以有效避免人工作业,减少由于测量误差引起的浪费,降低企业经济损失。
5.目前测量钢板坯位置的方法有:人工测量法等;钢板坯温度达600
°
以上,环境恶劣,人文条件差,测量误差大,不能提供精确的位置,给下游工序造成操作上的不方便。
技术实现要素:
6.本发明的目的在于提供一种高精度、可靠调节型钢坯定位测量机器人装置。
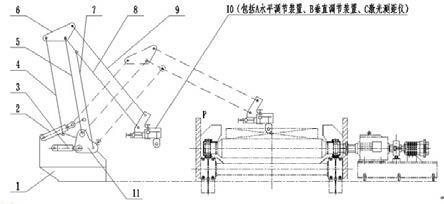
7.本发明提出的一种高精度、可靠调节型钢坯定位测量机器人装置,由底座、第一油缸、第二油缸、大臂、第一拉杆、第二拉杆、小臂、平衡臂、动力臂、第三拉杆、头部调节装置、液压控制系统和plc控制系统组成,其中:底座上设置铰接点n,大臂下端和动力臂分别与铰接点n连接,大臂上端与平衡臂铰接点m连接;大臂下端一侧连接第一油缸和y轴行程控制机构,plc控制系统连接液压控制系统,液压控制系统连接第一油缸,plc控制系统给液压控制系统发出控制信号,第一油缸接收信号,驱动大臂在垂直方向绕底座上铰接点n绕y轴转动,通过y轴行程控制机构检测其行程;动力臂和第二油缸铰接,液压控制系统连接第二油缸,第二油缸接收信号,驱动动力臂绕底座铰接点n旋转;底座通过第一拉杆连接平衡臂一端,平衡臂另一端连接第三拉杆;第二拉杆一端连接动力臂,另一端连接小臂;大臂上端和小臂前端通过平衡臂铰接点m相互连接,经第一拉杆、第二拉杆和第三拉杆的综合平衡调节,驱动头部调节装置到达预定测量位置;头部调节装置由水平调节装置、垂直调节装置和激光测距仪组成,头部调节装置安装于小臂后端;水平调节装置上丝母与垂直调节装置的支座连接,垂直调节装置上丝母与激光测距仪连接板连接,当激光测距仪与预定测量位置在水平和垂直两方向上存在一定误差时,反复调节水平调节装置上丝杠丝母手柄,驱动垂直调节装置带动激光测距仪水平移动,使激光测距仪水平方向误差达到要求精度;再反复调节垂直调节装置上丝杠丝母手柄,使激光测距仪垂直方向达到预设位置,激光测距仪垂直方向位置与预定测量位置误差≤1mm。
8.本发明中,所述第一油缸和第二油缸均采用液压油缸。
9.本发明中,所述第一油缸和第二油缸上均设置有行程控制机构,针对不同测量对象确定不同的位移量。
10.本发明在高温钢坯工况条件下,与通用测量方法比较,液压测距机器人具有下述优点:1、工作状态时伸出,非工作状态缩回,节约占地面积;2、头部调节装置装设防护罩,具有耐温防灰尘效果,适用恶劣环境,安全可靠;3、油缸行程可调,针对不同测量对象具有普遍适用性;4、结构简单,维护方便,成本低,寿命长;5、适用于连续、批量作业;6、代替人工作业,节约成本。
附图说明
11.图1为本发明的结构示意图;图2为本发明头部调节装置示意图;图3为本发明底座上三路连接组件连接示意图;图4为本发明原始位置示意图;图5为本发明工作位置示意图;图中标号:1、底座,2、第一油缸,3、第二油缸,4、第一拉杆,5、大臂,6、平衡臂,7、第二拉杆,8、小臂,9、第三拉杆,10、头部调节装置,a、水平调节装置,b、垂直调节装置,c、激光测距仪,11、动力臂,12、液压控制系统,13、plc控制系统。
具体实施方式
12.下面通过实施例结合附图进一步说明本发明。
13.实施例1:如图1所示,本装置由底座1、第一油缸2、第二油缸3、大臂5、第一拉杆4、第二拉杆7、小臂8、平衡臂6、动力臂11、第三拉杆9、头部调节装置10、液压控制系统、激光测距仪c、plc控制系统等组成,底座1上设置铰接点n,大臂5下端和动力臂11与铰接点n连接,大臂5上端与平衡臂6上铰接点m连接;大臂5还连接第一油缸2,第一油缸2驱动大臂5在垂直方向绕底座1上铰接点n绕y轴转动,通过y轴行程控制机构检测其行程;动力臂11还和第二油缸3铰接,第二油缸3驱动动力臂11绕铰接点n旋转;通过第一拉杆4、第二拉杆7,第三拉杆9的综合平衡调节,驱动头部调节装置10到达预定测量位置,此时激光测距仪c与预定测量位置在水平垂直两方向上存在一定误差,激光测距仪c安装于小臂8后端,和头部调节装置上的垂直调节装置b固定在一起,反复调节水平调节装置a上丝杠丝母手柄,驱动垂直调节装置b,使激光测距仪水平方向误差达到要求精度;再反复调节垂直调节装置b上的丝杠丝母手柄,使测距仪垂直方向达到预设位置,使激光测距仪位置与预定测量位置误差≤1mm。
14.如图2所示,头部调节装置由水平调节装置a、垂直调节装置b、激光测距仪c组成。水平调节装置a上丝母与垂直调节装置b的支座连接,垂直调节装置b上丝母与激光测距仪c的连接板连接。
15.如图3所示,底座1与基础固定,底座1上有三路连接组件,每个组件与其前后组件
通过铰支机构连接,本设备机械臂运动为二维空间伸缩运动。
16.1、第二油缸3接收液压控制系统信号伸出,驱动动力臂11绕底座1上铰接点n旋转,带动第二拉杆7旋转同样角度,第二拉杆7进一步带动小臂8和第三拉杆9绕平衡臂6旋转,带动头部调节装置10(包括水平调节装置a、垂直调节装置b、激光测距仪c)上升一定高度,避开防火墙p;2、第一油缸2接收液压控制系统信号伸出,驱动大臂5绕底座1上铰接点n旋转,带动平衡臂6、小臂8,第三拉杆9做旋转运动,目的使头部调节装置上的激光测距仪c的测量点到达预定测量位置,此时,距离预定测量位置存在一定的水平误差和垂直误差;3、手动调节头部调节装置上的水平方向(x轴方向)水平调节装置a上的丝杠丝母,消除水平误差;使误差精度≤1mm;4、手动调节头部调节装置上的垂直方向(y轴方向)垂直调节装置b上的丝杠丝母,消除垂直误差;使误差精度≤1mm;5、通过步骤1、步骤2、步骤3、步骤4的操作,使激光测距仪c到达精确的测量位置,完成精准的调节过程。
17.针对不同的测量对象,可以通过调节两台油缸的行程及头部调节装置中垂直和水平两个方向的位移,达到该机器人装置针对不同对象的普遍适用性。
18.本发明中,所述油缸上设置行程控制机构,针对不同测量对象确定不同的位移量。
技术特征:
1.一种高精度、可靠调节型钢坯定位测量机器人装置,由底座、第一油缸、第二油缸、大臂、第一拉杆、第二拉杆、小臂、平衡臂、动力臂、第三拉杆、头部调节装置、液压控制系统和plc控制系统组成,其特征在于:底座上设置铰接点n,大臂下端和动力臂分别与铰接点n连接,大臂上端与平衡臂铰接点m连接;大臂下端一侧连接第一油缸和y轴行程控制机构,plc控制系统连接液压控制系统,液压控制系统连接第一油缸,plc控制系统给液压控制系统发出控制信号,第一油缸接收信号,驱动大臂在垂直方向绕底座上铰接点n绕y轴转动,通过y轴行程控制机构检测其行程;动力臂和第二油缸铰接,液压控制系统连接第二油缸,第二油缸接收信号,驱动动力臂绕底座铰接点n旋转;底座通过第一拉杆连接平衡臂一端,平衡臂另一端连接第三拉杆;第二拉杆一端连接动力臂,另一端连接小臂;大臂上端和小臂前端通过平衡臂铰接点m相互连接,经第一拉杆、第二拉杆和第三拉杆的综合平衡调节,驱动头部调节装置到达预定测量位置;头部调节装置由水平调节装置、垂直调节装置和激光测距仪组成,头部调节装置安装于小臂后端;水平调节装置上丝母与垂直调节装置的支座连接,垂直调节装置上丝母与激光测距仪连接板连接,当激光测距仪与预定测量位置在水平和垂直两方向上存在一定误差时,反复调节水平调节装置上丝杠丝母手柄,驱动垂直调节装置带动激光测距仪水平移动,使激光测距仪水平方向误差达到要求精度;再反复调节垂直调节装置上丝杠丝母手柄,使激光测距仪垂直方向达到预设位置,激光测距仪垂直方向位置与预定测量位置误差≤1mm。2.根据权利要求1所述的一种高精度、可靠调节型钢坯定位测量机器人装置,其特征在于:所述第一油缸和第二油缸均采用液压油缸。3.根据权利要求1所述的一种高精度、可靠调节型钢坯定位测量机器人装置,其特征在于:所述第一油缸和第二油缸上均设置有行程控制机构,针对不同测量对象确定不同的位移量。
技术总结
本发明涉及一种高精度、可靠调节型钢坯定位测量机器人装置,由底座、第一油缸、第二油缸、大臂、第一拉杆、第二拉杆、小臂、平衡臂、动力臂、第三拉杆、头部调节装置、液压控制系统、激光测距仪、PLC控制系统等组成,通过油缸伸缩,手动调节丝杠丝母达到精确测量钢坯位置的目的。使用单一液压动力装置,决定了系统具有高精度、高可靠性,适应于精准测距的工艺要求和恶劣环境要求。油缸行程可调,针对不同测量对象具有普遍适用性;结构简单,维护方便,成本低,寿命长;适用于连续、批量作业;代替人工作业,节约成本。节约成本。节约成本。
技术研发人员:程煌 黄美丽
受保护的技术使用者:上海东震冶金工程技术有限公司
技术研发日:2022.02.09
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。