1.本发明涉及一种消杀机器人,属于室内消杀设备领域。
背景技术:
2.消杀机器人是指能够实行消毒杀菌工作的机器人,市面上常见的消杀机器人分为喷雾式消杀机器人和紫外线式消杀机器人两种,喷雾式消杀机器人是将消毒液经雾化喷出以实现杀菌消毒的效果,是最常见的喷雾杀菌方式。而紫外线式消杀机器人功率较高,常常超过10000瓦才能形成有效的杀菌效果。仅能对物品表面进行消杀,无法对物品内部消杀。大功率的紫外光照射空气,产生对人体有害的臭氧。目前,喷雾式和紫外线式两种方式无法结合使用,导致消杀效果不佳。
技术实现要素:
3.为克服上述缺点,本发明的目的在于提供一种消杀机器人。具有紫外线式、等离子体式和超声波式消杀装置,消杀效果好,以解决单一式消杀的缺陷。
4.为了达到以上目的,本发明采用的技术方案是:一种消杀机器人,包括机器人主体,贯穿机器人主体的风道、直筒风机、等离子模块和若干紫外光模块,风道具有进风口和出风口,直筒风机设置在风道的中部,紫外光模块和等离子模块自进风口至出风口依次设置在风道上,所述机器人主体上还设置有超声模块,超声模块发出240-260hz的超声波。
5.本发明进一步的设置为:所述超声模块包括右侧超声波模块和左侧超声波模块,右侧超声波模块和左侧超声波模块分别设置在所述消杀机器人的两肩部。
6.本发明进一步的设置为:所述超声模块还包括卫生手消杀超声波模块和地面消杀超声波模块;所述消杀机器人的前侧面中部连接有锲形块,卫生手消杀超声波模块和地面消杀超声波模块分别设置在锲形块的上下表面上。
7.本发明进一步的设置为:所述直筒风机将所述风道分割为进风风道和出风风道;所述紫外光模块和等离子模块分别设置在进风风道和出风风道上。
8.本发明进一步的设置为:所述出风风道的中轴线相对于所述直筒风机的中轴线旋转10-70度。
9.本发明进一步的设置为:所述进风风道包括后进风风道和侧进风风道,后进风风道和侧进风风道的顶端与直筒风机的进口连接,后进风风道和侧进风风道的底端分别与设置在机器人主体上的后进风口和侧面进风口连接。
10.本发明进一步的设置为:所述锲形块的上表面设置有通孔阵,所述卫生手消杀超声波模块发出的超声通过通孔阵向外传播。
11.与现有技术相比,本发明的有益效果是:通过将紫外光模块和等离子模块自进风口至出风口依次设置在风道上,紫外光模块发出紫外光,消杀大部分微生物,等离子体进一步净化空气,不仅将空气中剩余的微生物消杀,而且能分解空气中的有机物。通过超声模块发出240-260hz的超声波,超声波具有良好的穿透性,对物体表面、及物体表面1米以下的范
围进行消杀,尤其适用于疏松结构的物质,冰层、木头等材料。
12.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
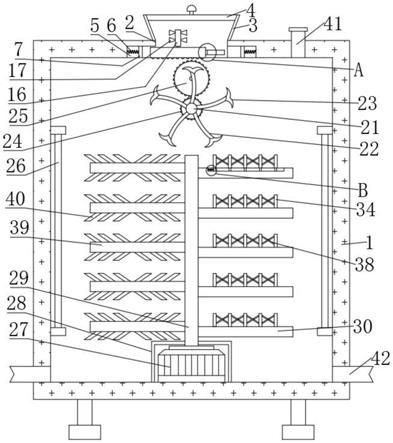
13.图1为本发明一较佳实施例所示的消杀机器人的主视图;图2为沿图1中aa线的剖视图;图3为本发明一较佳实施例所示的消杀机器人的右视图;图4为沿图3中bb线的剖视图;图5为本发明一较佳实施例所示的消杀机器人的另一视角结构示意图。
14.图中:1、机器人主体;2、后进风口;3、紫外光模块;4、直筒风机;5、进风风道;6、出风风道;7、等离子模块;8、出风口;9、右侧超声波模块;10、左侧超声波模块;11、卫生手消杀超声波模块;12、地面消杀超声波模块;13、侧面进风口;14、锲形块;15、通孔阵;16、后进风风道;17、侧进风风道。
具体实施方式
15.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
16.参见附图1-5所示,本实施例中的一种消杀机器人,包括机器人主体1,贯穿机器人主体1的风道、直筒风机4、等离子模块7和若干紫外光模块3,风道具有进风口和出风口8,直筒风机4设置在风道的中部,紫外光模块3和等离子模块自进风口至出风口8依次设置在风道上,所述机器人主体1上还设置有超声模块,超声模块发出240-260hz的超声波。
17.通过将紫外光模块3和等离子模块自进风口至出风口8依次设置在风道上,紫外光模块3发出紫外光,消杀大部分微生物,等离子体进一步净化空气,不仅将空气中剩余的微生物消杀,而且能分解空气中的有机物。通过超声模块发出240-260hz的超声波,超声波具有良好的穿透性,对物体表面、及物体表面1米以下的范围进行消杀,尤其适用于疏松结构的物质,冰层、木头等材料。
18.本发明进一步的设置为:所述超声模块包括右侧超声波模块9和左侧超声波模块10,右侧超声波模块9和左侧超声波模块10分别设置在所述消杀机器人的两肩部。当消杀机器人按照预定轨迹运动时,右侧超声波模块9和左侧超声波模块10发出超声波,对周围物体进行消杀。消杀范围广,且无毒副作用,无耗材损失。
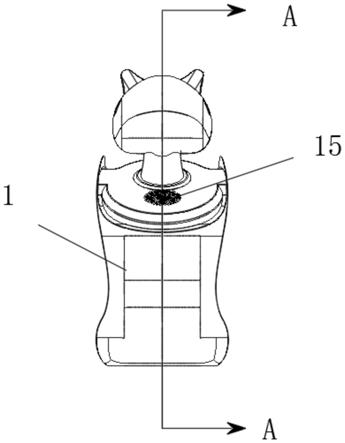
19.为了能给用户的手部消杀,以及对地面消杀,本发明进一步的设置为:所述超声模块还包括卫生手消杀超声波模块11和地面消杀超声波模块12;所述消杀机器人的前侧面中部连接有锲形块14,卫生手消杀超声波模块11和地面消杀超声波模块12分别设置在锲形块14的上下表面上。
20.锲形块14自消杀机器人伸出,像一个洗手盆一样提示着用户对手部进行消杀。
21.本发明进一步的设置为:所述直筒风机4将所述风道分割为进风风道5和出风风道6;所述紫外光模块3和等离子模块7分别设置在进风风道5和出风风道6上。
22.本发明进一步的设置为:所述出风风道6的中轴线相对于所述直筒风机4的中轴线
旋转10-70度。
23.本发明进一步的设置为:所述进风风道5包括后进风风道16和侧进风风道17,后进风风道16和侧进风风道17的顶端与直筒风机4的进口连接,后进风风道16和侧进风风道17的底端分别与设置在机器人主体1上的后进风口2和侧面进风口13连接。分别通过后进风风道16和侧进风风道17进风,即使堵塞后进风风道16和侧进风风道17其中之一,仍能保持进风畅通,降低故障率。
24.为了减少超声波损耗,本发明进一步的设置为:所述锲形块14的上表面设置有通孔阵15,所述卫生手消杀超声波模块11发出的超声通过通孔阵15向外传播。
25.以上实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所做的等效变化或修饰,都应涵盖在本发明的保护范围内。
技术特征:
1.一种消杀机器人,包括机器人主体,贯穿机器人主体的风道、直筒风机、等离子模块和若干紫外光模块,风道具有进风口和出风口,直筒风机设置在风道的中部,紫外光模块和等离子模块自进风口至出风口依次设置在风道上,其特征在于,所述机器人主体上还设置有超声模块,超声模块发出240-260hz的超声波。2.根据权利要求1所述的消杀机器人,其特征在于,所述超声模块包括右侧超声波模块和左侧超声波模块,右侧超声波模块和左侧超声波模块分别设置在所述消杀机器人的两肩部。3.根据权利要求2所述的消杀机器人,其特征在于,所述超声模块还包括卫生手消杀超声波模块和地面消杀超声波模块;所述消杀机器人的前侧面中部连接有锲形块,卫生手消杀超声波模块和地面消杀超声波模块分别设置在锲形块的上下表面上。4.根据权利要求3所述的消杀机器人,其特征在于,所述直筒风机将所述风道分割为进风风道和出风风道;所述紫外光模块和等离子模块分别设置在进风风道和出风风道上。5.根据权利要求4所述的消杀机器人,其特征在于,所述出风风道的中轴线相对于所述直筒风机的中轴线旋转10-70度。6.根据权利要求5所述的消杀机器人,其特征在于,所述进风风道包括后进风风道和侧进风风道,后进风风道和侧进风风道的顶端与直筒风机的进口连接,后进风风道和侧进风风道的底端分别与设置在机器人主体上的后进风口和侧面进风口连接。7.根据权利要求3所述的消杀机器人,其特征在于,所述锲形块的上表面设置有通孔阵,所述卫生手消杀超声波模块发出的超声通过通孔阵向外传播。
技术总结
本发明公开了一种消杀机器人,包括机器人主体,贯穿机器人主体的风道、直筒风机、等离子模块和若干紫外光模块,风道具有进风口和出风口,直筒风机设置在风道的中部,紫外光模块和等离子模块自进风口至出风口依次设置在风道上,所述机器人主体上还设置有超声模块,超声模块发出240-260HZ的超声波。紫外光模块发出紫外光,消杀大部分微生物,等离子体进一步净化空气,不仅将空气中剩余的微生物消杀,而且能分解空气中的有机物。通过超声模块发出240-260HZ的超声波,超声波具有良好的穿透性,对物体表面、及物体表面1米以下的范围进行消杀,尤其适用于疏松结构的物质,冰层、木头等材料。木头等材料。木头等材料。
技术研发人员:弓小武 范挺 赵淼 刚晓鑫 王保保 张绍阳 罗明 刘建养 郏文海 张磊 张德强 范晨晨 王叶斌
受保护的技术使用者:苏州捷康人工智能科技有限公司
技术研发日:2022.02.25
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。