1.本发明属于地磁匹配导航定位技术领域,具体涉及一种基于地磁特征量的高精度实时导航定位方法。
背景技术:
2.导航本意是引导航行,即监测和引导载体的行进过程。随着科学技术的发展,各种现代化运载体,例如:高铁、火箭、潜艇的出现,导航已经不仅仅是监测或引导,它还需要提供相应的定位、定向的数据信息,而且还要保证载体的行驶安全。导航系统已经日益广泛应用于航空、航天和国防等众多领域。对于更加快速的、高精度的以及智能化导航定位技术的需求,不仅是人们日益提高的生活水平的要求,也是一个国家国防科技水平的重要体现。现代导航系统主要有卫星导航系统、惯性导航系统、天文导航系统等。目前,常用的导航系统在实际应用中,会出现由于误差累积导致的导航精度不足、无典型地貌特征难以实现景象/地形匹配等问题。例如,在深水区长时间航行时,潜艇误差不断积累又难以进行误差修正;再如,飞行器在飞行时,容易受到信号的屏蔽与干扰;另外,在地形特征单一的地区,如沙漠和海洋区域,地形匹配技术也难以实现。因此,一种能够满足误差不随时间累积、具有较强抗干扰能力、自主性、全天候、全天时、全地域的地磁导航定位技术便成为一种选择。
3.地磁场是一个基本物理场,是地球内部存在的天然地磁现象。地磁场之所以能用作导航,是因为处于地球上或近地空间上的任意一点,都有唯一的地磁场参数信息与其对应,这是地磁导航的理论基础。近年来,随着大地测量、地球物理等领域技术的不断发展,使得地磁理论日益成熟,地磁导航技术得到了快速的发展,是当今导航定位领域的研究热点。地磁导航是一种无源自主导航技术,其主要包括地磁场模型的构建、实时地磁数据测量、地磁导航算法三部分。根据地磁导航算法的不同,它可以分为地磁匹配导航和地磁滤波导航。其中,地磁匹配导航由于其原理简单、操作方便、隐蔽性较强、可断续使用等特点,逐渐引起研究人员的关注。目前,地磁匹配导航技术主要应用于导弹、低轨卫星、飞机、船舶以及潜艇等的导航定位。其原理就是,通过搭载在载体上的地磁传感器,实时测量其所在位置的地磁数据,并与存储在地磁数据库中的模型信息进行比较,得出载体的实时位置坐标,并按照一定的准则判断最佳匹配位置,从而实现定位导航。一个高精度的地磁数据库及地磁模型,能够为地磁导航提供精确的定位基准。目前,地磁数据库的普遍建库方法,是将导航区域内大量离散点的大地坐标及与之对应的地磁要素数据存储在地磁数据库中。这样的地磁数据库,虽然能够满足高精度的地磁导航要求,但其有以下两大弊端:
4.(1)数据量极其庞大,对载体硬件的内存需求极高;
5.(2)大量地磁数据的获取是一个复杂的工程,要耗费巨大的人力物力。由于上面两个掣肘,要建立较大区域甚至全球区域的地磁数据库,在短期若干年内几乎无法完成。这严重阻碍了现有地磁导航定位方法的应用。
技术实现要素:
6.针对现有地磁导航定位技术中存在的地磁数据量过大、定位精度低的技术问题,本发明的目的在于,提供一种基于地磁特征量的高精度实时导航定位方法,以满足实时导航定位的需求。
7.为了实现上述任务,本发明采取如下的技术解决方案:
8.一种基于地磁特征量的高精度实时导航定位方法,其特征在于,包括以下步骤:
9.步骤一:飞行器的定位—建立大地坐标拟合模型
10.首先,通过地磁场要素计算公式以及igrf-13模型的球谐系数,获取一定区域内、一定采样间隔的地磁场要素数据;选择两组不同的地磁要素数据进行最小二乘拟合,得到地磁要素拟合的大地坐标拟合模型;
11.然后采用分级子图的方法提高大地坐标拟合模型的拟合精度,具体操作如下:
12.选择两个不同的地磁要素进行最小二乘拟合,并进行拟合精度评估,然后划分该区域,获得新一级的拟合区域,而这个新的拟合区域将小于上一级拟合区域的面积,并对每一个新的拟合区域重新进行地磁要素拟合,由于拟合面积逐渐减小,拟合精度将不断提高;反复执行上述步骤,直至拟合区域的面积达到所需拟合精度要求为止;
13.步骤二:与预置飞行轨迹进行匹配—建立飞行器纬度拟合模型
14.预置的飞行轨迹包含了大地坐标及其对应的地磁特征量信息,首先,将其中的大地坐标用神经网络进行处理,得到飞行轨迹上各点的经纬度之间的非线性关系,从而确定飞行轨迹的纬度拟合模型;
15.然后将步骤一中最终的定位坐标与步骤二中得到的纬度拟合模型进行比较,确定预置轨迹上离飞行器最近的点的大地坐标,最终完成与预置飞行轨迹的匹配。
16.本发明的基于地磁特征量的高精度实时导航定位方法,带来的有益效果是,在保证高精度智能化地磁导航技术的基础上,有效降低地磁数据库的数据存储量,进而缓解硬件内存负荷,使其能够储存更大范围的地磁数据。
附图说明
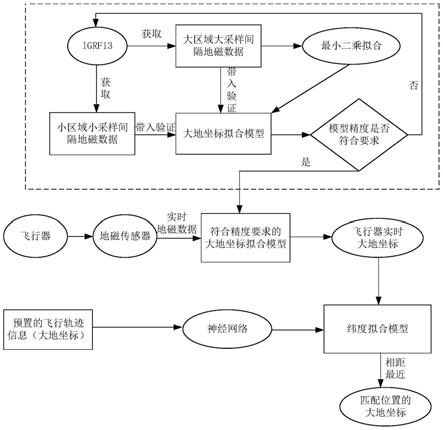
17.图1是本发明的基于地磁特征量的高精度实时导航定位方法流程图;
18.图2是区域划分图;
19.图3是坐标拟合模型数据库结构示意图;
20.图4是基于坐标拟合模型的飞行器定位图;
21.图5是匹配算法可靠性分析系统;
22.图6是基于东向分量y的大地坐标拟合结果随阶数的变化;
23.图7是基于东向分量y和垂直分量z的大地坐标拟合结果随阶数的变化;
24.图8是部分中国区域内地磁特征量y、z的等值线图;其中,(a)图是东向分量y的等值线图,(b)图是垂直分量z的等值线图;
25.图9是2016年三个研究区域(a)(b)(c)的定位结果;其中,(a)图是关中平原,(b)图是台湾岛,(c)图是南沙群岛;
26.图10是2021年三个研究区域(a)(b)(c)的定位结果;其中,(a)图是关中平原,(b)图是台湾岛,(c)图是南沙群岛;
27.下面结合附图和实施例对本发明进行进一步地详细说明。
具体实施方式
28.如图1所示,本实施例给出一种基于地磁特征量的高精度实时导航定位方法,具体实施过程如下:
29.第一部分:
30.步骤一:飞行器的定位—建立大地坐标拟合模型
31.首先,通过地磁场要素计算公式以及igrf-13模型的球谐系数,获取一定区域内、一定采样间隔的地磁场要素数据。选择两组不同的地磁要素数据进行最小二乘拟合,得到地磁要素拟合大地坐标的拟合模型。
32.由于拟合精度与拟合区域的面积有关,面积越大时,精度越低,为提高大区域的地磁数据的拟合精度,采用分级子图的方法,具体操作如下:
33.选择两个不同的地磁要素进行最小二乘拟合,并进行拟合精度评估,然后划分该区域,获得新一级的拟合区域,而这个新的拟合区域将小于上一级拟合区域的面积,并对每一个新的拟合区域重新进行地磁要素拟合,由于拟合面积逐渐减小,拟合精度将不断提高。反复执行上述步骤,直至拟合区域的面积达到所需拟合精度要求为止。
34.在具体的应用中,为了使该方法满足较高的精度和实时定位的要求,将整个区域,按照东西方向划分成两个子区域,如图2所示。两个子区域的一半面积重叠,这是因为按东西方向划分更符合地磁要素z变化趋势,其变化梯度更明显,相对于按南北方向划分精度更高。而一分四划分导航区域,相较于一分二划分导航区域,其地磁要素拟合得到的坐标精度提高的非常显著。一分二划分导航区域,计算时间短、地磁数据占用的内存更少。经过划分后,每个子区域都有一个对应的坐标拟合模型。将这些拟合模型建成一个大地坐标拟合模型数据库,该数据库结构如图3所示,具体建库步骤如下:
35.(1)将总飞行区域划分成2个子区域,拟合总区域地磁要素采样点间隔为600米
×
600米,拟合子区域的采样点间隔为500米
×
500米。采用间隔之所以不同,是由于考虑到了精度的要求(经度方向误差不大于16米,纬度方向误差不大于12米)。于是,拟合总区域共包含有111,556个地磁要素采样点,一个子区域包含有107,067个地磁要素采样点。每一个子区域都按下式(1)中的三个多项式进行拟合。
[0036][0037]
最后,仿真实验结果表明:用东分量y和垂直分量z拟合大地坐标的精度最高,其坐标拟合多项式为:
[0038][0039]
式中,lon(y,z)为大地经度拟合模型;lat(y,z)为大地纬度拟合模型;y,z分别表示地磁场要素中的东向分量和垂直分量;a1、b1、c1…
j1为大地经度拟合模型的系数;a2、b2、c2…
j2为大地纬度拟合模型的系数。
[0040]
(2)建立数据库时,首先要确定总区域的大地坐标范围:{[lat
总min
,lat
总max
]、[lon
总min
,lon
总max
]},以及各个子区域的大地坐标范围。每个子区域的坐标拟合模型的形式都如公式(2),但每个子区域拟合模型之间的系数a、b、c
…
j的值不同。
[0041]
将公式(2)存储在主文件中,每个子区域拟合模型的系数存储在头文件fi中,第一个子区域的头文件为f1,第二个子区域的头文件为f2。通过调用头文件中的系数,得到所需子区域的坐标拟合模型。
[0042]
(3)为了确定飞行器当前所在位置,需要在坐标拟合模型数据库中进行搜索计算,具体包括:
[0043]
首先,需将地磁要素数据输入到总区域坐标拟合模型中,得到初步定位的大地坐标c
总
(lat
总
,lon
总
);由于已知1号子区域的大地坐标范围:{[lat
1min
,lat
1max
]、[lon
1min
,lon
1max
]}和2号子区域的大地坐标范围:{[lat
2min
,lat
2max
]、[lon
2min
,lon
2max
]},即可通过c
总
和各子区域范围来确定c
总
与哪个子区域的中心最近,进而确定飞行器当前位置所在的子区域,并采用该子区域坐标拟合模型,计算得到最终定位的大地坐标。
[0044]
然后,将飞行器上搭载的传感器获取的地磁数据,导入到总区域和各子区域的拟合模型中,如图4所示,拟合模型将地磁传感器的实时地磁数据并列进入总区域拟合模型、1号子区域拟合模型、2号子区域拟合模型,分别得到的总区域定位的大地坐标、1号子区域的大地坐标、2号子区域的大地坐标,其中,总区域定位的大地坐标与各子区域中心进行距离比较。通过计算得到总区域拟合模型所定位的大地坐标:(lat
总
,lon
总
)和各子区域拟合模型所定位的大地坐标:(lat
子1
,lon
子1
)和(lat
子2
,lon
子2
)。之后,分别计算(lat
子1
,lon
子1
)和(lat
子2
,lon
子2
)与(lat
总
,lon
总
)的距离,与(lat
总
,lon
总
)距离最近的大地坐标,就是最终的定位坐标。
[0045]
步骤二、与预置飞行轨迹进行匹配—建立飞行器纬度拟合模型
[0046]
系统中预置的飞行轨迹包含了大地坐标及其对应的地磁特征量信息。首先,将其中的大地坐标用神经网络进行处理,得到飞行轨迹上各点的经纬度之间的非线性关系,从而确定飞行轨迹的纬度拟合模型lat=f(lon)。将步骤一中最终的定位坐标与步骤二中得到的纬度拟合模型进行比较,确定预置轨迹上离飞行器最近的点的大地坐标,最终完成与预置飞行轨迹的匹配。
[0047]
第二部分:
[0048]
下面从理论角度并结合具体案例,阐述本实施例的基于地磁特征量的高精度实时导航定位方法的有益效果:
[0049]
一、基于地磁场的空间变化,分析地磁匹配特征量的变化特点
[0050]
为了能够定量描述不同地磁要素在空间上的变化情况,在此引入地磁场坡度的概念。
[0051]
在传统理论中,坡度是表示地形复杂度的抽象概念,用以描述地形的变化趋势和起伏大小的。对于地磁场单一要素标量值而言,其特性与地形变化有很大的关系。因此,采用这个概念来描述地磁场在空间上的变化情况。如果地磁场的大小变化剧烈,说明其地形起伏变化明显,也就表明其地磁场变化复杂,那么就越容易实现高精度地磁匹配导航。其计算公式如下所示:
[0052]sx
(i,j)=[h(i 1,j 1) 2h(i 1,j) h(i 1,j-1)-h(i-1,j 1)-2h(i-1,j)-h(i-1,j-1)]/8d
x
(3)
[0053]
sy(i,j)=[h(i 1,j 1) 2h(i,j 1) h(i-1,j 1)-h(i 1,j-1)-2h(i,j-1)-h(i-1,j-1)]/8dy(4)
[0054][0055]
式中,h(i,j)表示(i,j)位置处的地磁场数值;d
x
表示x方向点与点之间的距离间隔;dy表示y方向点与点之间的距离间隔;s
x
(i,j)表示x方向的地磁坡度值;sy(i,j)表示y方向的地磁坡度值;s(i,j)表示计算出的整片区域的地磁坡度值。
[0056]
二、选取最佳数量及最佳组合的地磁匹配特征量
[0057]
地磁匹配导航的其中一个难点在于地磁匹配算法。利用传统的地磁匹配算法,不仅需要花费大量时间来制作地磁数据库,而且要占用大量的内存,定位精度也普遍较低。因此,在综合考虑了飞行器硬件的限制和实时匹配定位的要求后,本方法拟基于最小二乘原理,采用地磁数据拟合经纬度坐标,来实现地磁匹配导航。由于不同数量以及不同组合的地磁特征量的拟合效果不同,甚至会有巨大的差别,因此,通过以下方式来选取最佳数量及最佳组合的地磁匹配特征量。
[0058]
(1)根据已有的理论和研究经验,多项式拟合的精度与拟合阶数并不是简单的线性关系,有时会产生龙格现象,影响精度。在经过实验分析后,我们选择三次多项式并通过以下三种方式来拟合大地坐标。
[0059]
①
以地磁特征量x、y、z、f、h中的一个作为自变量,经纬度分别作为因变量,以此拟合一元方程;
[0060][0061]
②
以地磁特征量x、y、z、f、h中的两个作为自变量,经纬度分别作为因变量,以此拟合二元方程;
[0062][0063]
③
以三个地磁特征量x、y、z作为自变量,经纬度分别作为因变量,以此拟合三元方程。
[0064][0065]
(2)通过以下两个评定标准得到最佳地磁匹配特征量
[0066]
①
基于所有拟合结果的rmse,以规定指标为基准,选出所有符合标准的拟合方法;
[0067]
②
基于所有符合标准的拟合方法,综合考虑经度与纬度拟合结果的rmse、拟合方法的困难程度,确定最佳的拟合方法,从而选择出最佳地磁匹配特征量。
[0068]
三、导航区域划分情况
[0069]
如图8所示,y是东向分量,为东西向变化,在我国内,其数值大概在[-1000nt,-4000nt]内,变化幅度较小;z是垂直分量,为南北向变化,在我国内,数值大概在[18000nt,54000nt]内,变化幅度较大。故z的变化梯度大,更容易识别。由于南北分区符合y的变化趋势,东西分区符合z的变化趋势,所以,按照东西方向来划分导航区域效果更好。接下来将通过具体实验结果进行验证。
[0070]
第三部分:
[0071]
第二部分描述了最佳地磁匹配特征量的理论选取方法,下面给出实验分析结果。
[0072]
(1)表1为一元一阶大地坐标拟合模型评价结果。
[0073]
表1:一元一阶大地坐标拟合模型评价
[0074][0075]
基于一元大地坐标拟合模型得到的经纬度坐标值的rmse均大于3.571e-05
°
,从经度和纬度的整体拟合情况来看,拟合精度较差。从图6可以看出,经度和纬度的拟合结果随阶数的变化大致相同。当拟合阶数位于三阶至七阶之间时,坐标的拟合精度相对较高。
[0076]
(2)表2是基于东向分量y的一元大地坐标拟合模型评价结果。
[0077]
表2:东向分量y的一元大地坐标拟合模型评价
[0078][0079]
从二元大地坐标拟合的结果来看,二元一阶拟合效果很好,坐标的rmse均小于5.444e-06
°
,决定系数均达到99.99%。从经度和纬度的整体拟合情况来看,用东向分量y和垂直分量z拟合大地坐标的精度最高。从图7可以看出,当阶数增加到三阶时,经纬度拟合精度均有较大的提高。但继续增加阶数后,拟合精度差别不大。
[0080]
由于北向分量x、东向分量y、垂直分量z是三个相互独立的地磁场要素,因此,利用这三个分量建立三元大地坐标拟合模型,拟合结果见下表3。
[0081]
表3:二元一阶大地坐标拟合模型评价
[0082]
[0083]
从三元大地坐标拟合的结果可以看出,利用三个相互独立的地磁场要素x、y、z可以很好地拟合大地坐标。其中,拟合的大地经度的rmse为1.238e-06
°
,大地纬度的rmse为3.689e-07
°
,决定系数均达到99.99%。
[0084]
综上所述,用单一的地磁场强度要素拟合大地坐标的效果不理想,且随着模型阶数的增加,拟合精度并没有较大改善。用两个或三个地磁场强度要素,可以很好地拟合大地坐标。从经度和纬度的整体拟合情况来看,当地磁场要素组合为东向分量y、垂直分量z时,所建立的大地坐标拟合模型的精度最好,并且当阶数增加到三阶时,拟合精度有较大的提高。拟合结果见表4和表5。
[0085]
表4:基于东向分量y和垂直分量z的二元大地坐标拟合模型评价
[0086][0087]
表5:三元一阶大地坐标拟合模型评价
[0088][0089]
因此,采用东向分量y和垂直分量z为地磁特征量组合,即按照东西方向划分地磁导航定位区域,所建立的二元三阶拟合模型精度最高。
[0090]
第四部分:
[0091]
下面对本实施例所提出的基于地磁特征量的高精度实时导航定位方法进行普适性分析。分析系统如图5所示,该系统考虑了不同环境下地磁场的特点、地磁匹配算法受地理环境的影响以及地磁匹配算法的普适性的因素。
[0092]
一、同一地理位置、不同时间序列定位精度的比较
[0093]
图9和图10分别给出了关中平原、台湾岛以及南沙群岛2016年与2021年的定位结果,表6、表7和表8分别给出了三个定位区域的定位误差。
[0094]
表6:2016年与2021年关中平原处定位误差
[0095][0096]
表7:2016年与2021年台湾岛处定位误差
[0097][0098]
表8:2016年与2021年南沙群岛处定位误差
[0099][0100]
可见,在同一个地理位置、不同时间,定位误差不大于2米,大多数情况下小于1米,且定位时间在2毫秒左右。
[0101]
二、同一时间、不同地理位置定位精度的比较
[0102]
表9与表10分别给出了三个研究区域在2016与2021年的定位误差。
[0103]
表9:2016年三个研究区域的定位误差
[0104][0105]
表10:2021年三个研究区域的定位误差
[0106][0107]
对于2016年的三个研究区域,经度方向最大误差为1.401m,最小误差为0.165m,纬度方向最大误差为0.245m,最小误差为0.033m。对于2021年的三个研究区域定位误差,经度方向最大误差为1.391m,最小误差为0.156m,纬度方向最大误差为0.256m,最小误差为0.033m。可见,对于同一时间、不同地理位置,定位误差大多数情况下小于1米,且定位时间在2毫秒左右。
[0108]
三、结论
[0109]
综上所述,无论是在基于同一时刻的不同区域情况下进行匹配导航,还是在基于同一区域的不同时刻的情况下进行匹配导航,本实施例提出的基于地磁特征量的高精度实时导航定位方法的定位精度与定位时间都完全满足高精度、实时性匹配导航的要求。在所有研究区域及所有时间点中,经度方向最大误差为1.401m,纬度方向最大误差为0.245m,最长的平均匹配时间为0.0028s。
[0110]
由以上的实验结果和分析可以看出,本实施例给出的基于地磁特征量的高精度实时导航定位方法,不受地理环境及时间的影响,具有普适性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。