1.本技术涉及人体动能采集技术领域,具体而言,涉及一种基于人体关节摆动的能量采集装置。
背景技术:
2.人体的代谢以及运动会消耗极大的能量,尤其是在运动时,肘关节或膝关节的弯折摆动使人体跳跃以及奔跑,在一些特定的场景中,人体需要携带或佩戴一些微型设备如血压检测仪、身体机能检测仪等微型电子设备,这些设备体积微小,但需要电源供电,蓄电式、锂电池等移动电源能够满足这些微型电子设备的供电,但在野外等电能供应不足的地方,这些微型电子设备将无法正常工作。
技术实现要素:
3.本发明的目的在于,针对上述现有技术中的不足,提供一种基于人体关节摆动的能量采集装置,以解决现有技术中人体携带或佩戴的微型电子设备在电能供应不足的地方无法正常工作的问题。
4.为实现上述目的,本发明采用的技术方案如下:
5.本技术提供一种基于人体关节摆动的能量采集装置,该装置包括发电机、第一齿轮组、第二齿轮组、轴、皮带、换向连接器、第一结构外壳、第二结构外壳、第一齿轮、第二齿轮,发电机、第一齿轮组、第二齿轮组、轴、皮带、第一齿轮、第二齿轮均设置在第一结构外壳内,换向连接器与第二结构外壳固定连接,换向连接器与第一齿轮组可转动连接,发电机固定在第一结构外壳的一端,第一齿轮与发电机的转轴固定连接,第一齿轮组固定在第一结构外壳的另一端,第二齿轮组通过轴与第一齿轮组固定连接,第二齿轮与第二齿轮组固定连接,第一齿轮和第二齿轮通过皮带传动连接。
6.更进一步地,第一齿轮组包括一个太阳齿轮、一个行星齿轮、一个内齿环。
7.更进一步地,换向连接器与第一齿轮组通过第一齿轮组的内齿环可转动连接。
8.更进一步地,第二齿轮组包括一个内齿环、杆、行星齿轮、行星架、固定齿轮。
9.更进一步地,第二齿轮组的内齿环和第一齿轮组的太阳齿轮通过轴固定连接。
10.更进一步地,固定齿轮固定设置在行星架上,行星架固定在轴上。
11.更进一步地,杆的一端固定设置有一个环状物,杆的另一端设置有可自由转动的行星齿轮。
12.更进一步地,杆通过环状物套在轴上。
13.更进一步地,第一结构外壳的形状为一个短边为半圆状的不规则矩形。
14.更进一步地,第一齿轮组固定设置在第一结构外壳的半圆状一侧,发电机固定设置在第一结构外壳的另一侧。
15.与现有技术相比,本发明的有益效果:本发明装置可以将膝关节或肘关节的折弯运动时产生的往复机械运动,转变为齿轮的旋转运动,从而带动发电机的转轴转动,使其发
电,实现将人体运动时的机械能转变为电能的目的,以在电能供应不足的地方使得人体携带或佩戴的微型电子设备能够正常工作。同时,本发明装置通过双行星齿轮系,带动行星齿轮往复运动,结合四个固定齿轮,将齿轮的往复转动转化为单一方向的齿轮旋转,从而使得发电机的转轴始终沿一个方向转动,即产生的电流方向恒定,即产生的电动势的方向恒定,方便电能的收集和利用。
附图说明
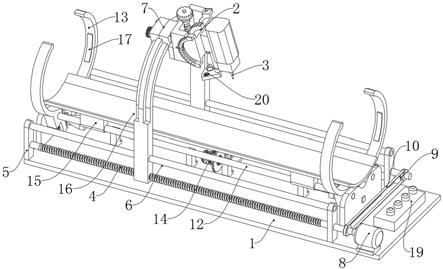
16.图1为本发明提供的一种基于人体关节摆动的能量采集装置的示意图;
17.图2为本发明提供的一种基于人体关节摆动的能量采集装置的第一齿轮组的示意图;
18.图3为本发明提供的一种基于人体关节摆动的能量采集装置的第二齿轮组的示意图。
19.图标:1-发电机;2-第一齿轮组;3-第二齿轮组;4-轴;5-皮带;6-换向连接器;7-第一结构外壳;8-第二结构外壳;9-第一齿轮;10-第二齿轮。
具体实施方式
20.为了使本发明的实施过程更加清楚,下面将会结合附图进行详细说明。
21.本发明提供了一种基于人体关节摆动的能量采集装置,如图1所示,该装置包括发电机1、第一齿轮组2、第二齿轮组3、轴4、皮带5、换向连接器6、第一结构外壳7、第二结构外壳8、第一齿轮9、第二齿轮10。发电机1、第一齿轮组2、第二齿轮组3、轴4、皮带5、第一齿轮9、第二齿轮10均设置在第一结构外壳7内。第一结构外壳7的形状为一个短边为半圆状的不规则矩形,第一齿轮组2固定设置在第一结构外壳7的半圆状一侧,半圆状的曲率大于等于第一齿轮组2的内齿环的曲率,这样能够尽可能提升空间利用率,减少本发明装置的体积,使得本发明装置方便携带。第二结构外壳8的形状为一侧短边中间有凹口,另一侧短边为逐渐变短的梯形状的不规则矩形,这样方便将第二结构外壳8固定在小臂或小腿上,更容易使得第二结构外壳8和小臂或小腿固定贴合。换向连接器6可以为硬质杆状物,也可以为与膝关节或肘关节贴合的柔性动能传递部件,这样换向连接器6随膝关节或肘关节弯折能够流畅地转动,体验感更好。换向连接器6的一端通过螺栓或万向节与第一齿轮组2固定连接,具体地,换向连接器6与第一齿轮组2的内齿环固定连接,更具体地,第一齿轮组2的内齿环上固定设置有一个与换向连接器6连接处匹配的凹状物,换向连接器6规定设置与第一齿轮组2的内齿环固定连接的凹状物处;换向连接器6的另一端通过第二结构外壳8上的凹口与第二结构外壳8固定连接,这样能够将肘关节或膝关节的弯折摆动转化为第一齿轮组2的内齿环的转动。
22.更具体地,发电机1固定在第一结构外壳7内设置有第一齿轮组2的另一端,第一齿轮9固定在发电机1上,与发电机1的转动轴固定连接,这样,第一齿轮9转动时,发电机1能够发电。如图2所示,第一齿轮组2为一组行星齿轮系,包含一个太阳齿轮、一个行星齿轮、一个内齿环,行星齿轮系具有体积小、重量轻、承载能力大、使用寿命长、传动效率高、工作平稳、噪声小、传动比圈大的优点,这有利于本发明装置减小装置体积和重量,同时具有较强的承载力,使得本发明装置的便携性更强;肘关节或膝关节的弯折摆动使得第一齿轮组2的内齿
环转动,该内齿环转动带动行星齿轮转动,行星齿轮转动带动太阳齿轮转动,从而将肘关节或膝关节的弯折摆动转化为第一齿轮组2中太阳齿轮的转动。如图3所示,第二齿轮组3是一个行星齿轮系,包括一个内齿环、杆、行星齿轮、一个行星架、四个固定齿轮。第二齿轮组3和第一齿轮组2的内齿环是同轴心的,第二齿轮组3和第一齿轮组2的内齿环大小可以相同也可以不相同,通过轴4将第一齿轮组2的太阳齿轮和第二齿轮组3的内齿环固定连接在一起,使得二者一起转动,从而第二齿轮组3的内齿环与第一齿轮组2的太阳齿轮共同转动,即第一齿轮组2的太阳齿轮的转动为第二齿轮组3提供动力。
23.杆的材料为硬质材料,形状为棒状,杆的长度恰好使得杆一端的行星齿轮能够与第二齿轮组3的内齿环啮合。杆的一端固定有环形物,另一端设置有一个可自由转动的行星齿轮,该行星齿轮即为第二齿轮组3的行星齿轮,具体地,第二齿轮组3的行星齿轮的几何中心不在杆的中心轴或其延长线上,这样第二齿轮组3的行星齿轮才能在杆的一端自由转动,且第二齿轮组3的行星齿轮的转动仅来自于第二齿轮组3的内齿环的转动,能够有效地将第二齿轮组3的内齿环的动力传递给第二齿轮组3的行星齿轮;通过环状物将杆套在轴4上,杆可绕轴4转动,第二齿轮组3的行星齿轮与第二齿轮组3的内齿环啮合接触;这样,第二齿轮组3的内齿环转动时,第二齿轮组3的行星齿轮能够绕第二齿轮组3的内齿环中心转动。行星架固定设置在轴4上,能够使得第二齿轮组3内的四个固定齿轮和第二齿轮组3的行星齿轮的几何中心在同一个平面上,且均位于第二齿轮组3的内齿环的中心平面上,这样,动力传动的效率最高。
24.行星架上固定设置有位置固定的固定齿轮,四个固定齿轮完全相同,这样能够均匀地传递动力,使得第二齿轮组3的行星齿轮的动能能够高效地传动到传动末端的固定齿轮。固定齿轮有四个,两端的固定齿轮之间需要经过两个固定齿轮传动,这样传递到最后一个固定齿轮时,其转动方向与第二齿轮组3的行星齿轮的转动方向一致,这样最后一个固定齿轮总是沿一个方向转动。相邻的固定齿轮之间啮合接触,且四个固定齿轮首尾不相接触,这样能够将第二齿轮组3的行星齿轮设置在首尾不相连接的四个固定齿轮的空当中,使得第二齿轮组3的行星齿轮与第二齿轮组3的内齿环能够啮合接触,从而实现传动;同时相邻的固定齿轮之间相互啮合接触,这样能够使得四个固定齿轮之间相互传动。第二齿轮组3的行星齿轮处于四个固定齿轮首尾不相连的空当中,第二齿轮组3的行星齿轮在第二齿轮组3的内齿环带动下,同时进行绕第二齿轮组3的内齿环中心的转动和自转。
25.四个固定齿轮的位置均固定,仅能够转动,因此第二齿轮组3的行星齿轮与固定一侧的固定齿轮接触,随着第二齿轮组3的内齿环的转动,第二齿轮组3的行星齿轮不再绕第二齿轮组3的内齿环中心的转动而是与固定一侧的固定齿轮进行啮合,由于相邻的固定齿轮之间相互啮合,从而使得四个固定齿轮传动旋转,具体地,第二齿轮组3的行星齿轮与固定齿轮啮合后,带动固定齿轮转动,固定齿轮有四个,两端的固定齿轮之间需要经过两个固定齿轮传动,这样传递到最后一个固定齿轮时,其转动方向与第二齿轮组3的行星齿轮的转动方向一致,为顺时针转动,这样最后一个固定齿轮总是沿一个方向转动,从而带动第二齿轮10转动,通过皮带5带动固定在发电机1转轴上的第一齿轮9转动,发电机1发出电流方向恒定的电,即发电机1产生的电动势方向恒定,实现将机械能转化为电能,同时方便收集和利用。四个固定齿轮中,靠近发电机1的固定齿轮上固定有第二齿轮10,该靠近发电机1的固定齿轮为末端固定齿轮,首尾不相连的另一端为首端固定齿轮,第二齿轮组3的内齿环转动
时,第二齿轮组3的行星齿轮与首端固定齿轮啮合,通过相邻固定齿轮传动,末端固定齿轮转动,从而带动第二齿轮10转动。第二齿轮10和第一齿轮9通过皮带5连接传动,第一齿轮9和第二齿轮10均为皮带齿轮,以便于在其上设置皮带进行传动,这样,能够使得第一齿轮9随第二齿轮10的转动而转动,而第一齿轮9与发电机1的转轴连接,从而产生电能,实现了机械能到电能的转化。具体地,第二齿轮10的齿轮半径大于第一齿轮9的齿轮半径,由于第一齿轮9和第二齿轮10通过皮带5连接,第一齿轮9和第二齿轮10边缘位置的线速度相同,这样在皮带5转动相同的距离时,第一齿轮9的转动角速度大于第二齿轮10,这样由法拉第电磁磁感应定律可知,能够产生更多的电能。
26.应用时,将第二结构外壳8固定在小臂或小腿上,换向连接器6位于肘关节或膝关节处,第一结构外壳7固定在大臂或大腿上,当人体运动时,肘关节或膝关节的弯曲使得换向连接器6产生摆动,从而带动第一齿轮组2的内齿环转动。第一齿轮组2为行星齿轮系,第一齿轮组2的内齿环转动带动行星齿轮转动,行星齿轮转动带动太阳齿轮转动;由于第一齿轮组2的太阳齿轮和第二齿轮组3的内齿环通过轴4固定连接在一起,在第一齿轮组2的太阳齿轮的带动下,第二齿轮组3的内齿环转动;第二齿轮组3的内齿环转动带动第二齿轮组3的行星齿轮绕第二齿轮组3的中心转动。由于第二齿轮组3的行星齿轮处于四个固定齿轮首尾不相连的空当中,第二齿轮组3的内齿环继续转动时,第二齿轮组3的行星齿轮与固定一侧的固定齿轮啮合接触,从而使得四个固定齿轮转动;具体地,第二齿轮组3的内齿环顺时针转动时,第二齿轮组3的行星齿轮顺时针自转,啮合后,带动固定齿轮转动,固定齿轮有四个,两端的固定齿轮之间需要经过两个固定齿轮传动,这样传递到最后一个固定齿轮时,其转动方向与第二齿轮组3的行星齿轮的转动方向一致,为顺时针转动,这样最后一个固定齿轮总是顺时针转动。
27.具体地,当膝关节或肘关节由弯曲转向平直时,第一齿轮组2与第二齿轮组3中的内齿环、行星齿轮、太阳齿轮旋转方向均与膝关节或肘关节的弯折方向相反,此时,第二齿轮组3中的内齿环将带动其内的行星齿轮绕其内齿环圆心进行逆时针旋转,当第二齿轮组3的行星齿轮碰到固定齿轮时,第二齿轮组3的行星齿轮不再绕第二齿轮组3的内齿环的圆心旋转,而是与固定齿轮啮合,转为自身的逆时针自转,与之啮合的固定齿轮顺时针转动;这样,传动末端的固定齿轮总是顺时针转动,从而带动第二齿轮10转动,通过皮带5带动固定在发电机1转轴上的第一齿轮9转动,发电机1发出电流方向恒定的电,即发电机1产生的电动势方向恒定,实现将机械能转化为电能,同时方便收集和利用,从而实现将人体运动时膝关节或肘关节的弯曲折叠能量转换为机械能,进而转化为电能,为微型电子设备供电。
28.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。