1.本发明涉及医疗设备技术领域,具体来说,涉及一种骨科手术定位打孔装置。
2.
背景技术:
3.骨科是各大医院最常见的科室之一,主要研究骨骼肌肉系统的解剖、生理与病理,运用药物、手术及物理方法保持和发展这一系统的正常形态与功能。随着交通事故的增加,人口老年化的日益加剧,硬性骨折和骨质疏松等疾病的患者也越来越多。而这些疾病的有效解决方式往往都是通过手术解决,骨科手术较于其他外科手术不同的点就是,应用的医疗器械最多。其中,骨科手术打孔装置就是其中一种,而常见的骨科手术打孔装置都是采用简单的电机外接一个钻头,医师通过手部握持电机的把手对患者进行打孔,这种方式一方面无法精确的做到钻孔的精准性,另一方面加大了医师的治疗难度。
4.其中,专利号cn109223095b的中国发明专利,其公开了一种骨科手术定位打孔装置,具体的该专利通过采用半环形齿轮实现了对钻头使用角度的调节,并通过设置护具对腿部进行夹持,该专利虽然在一定程度上提高了定位的精准度,但是在实际使用时还存在以下缺陷:1、该专利只能对打孔角度进行调节,而无法实现钻头水平方向上的调节,从而导致在手术过程中需要提前找好位置点才能进一步对腿部进行固定,若在手术中发现水平位置有误差则需要重新对腿部进行固定,,从而导致操作繁琐不利于实际的使用;2、该专利只设置有一组夹持护具,且为手动调节,这样不仅无法保证夹持的稳定性,也无法对夹持力进行精准控制,从而可能导致对患者造成二次伤害,且该专利未设置术前及术中自动消毒装置,从而可能造成伤口感染。
5.针对相关技术中的问题,目前尚未提出有效的解决方案。
6.
技术实现要素:
7.针对相关技术中的问题,本发明提出一种骨科手术定位打孔装置,以克服现有相关技术所存在的上述技术问题。
8.为此,本发明采用的具体技术方案如下:一种骨科手术定位打孔装置,包括底座及驱动装置,驱动装置的输出端连接设置有钻头,底座的上方横向对称设置有两组螺纹杆,两组螺纹杆均通过若干第一轴承座与底座的顶端连接,且两组螺纹杆的外侧均套设有移动环,移动环的外侧通过滑动组件连接设置有驱动装置,其中一组螺纹杆的一端连接设置有第一电机,且两组螺纹杆的一端均套设有皮带轮,两组皮带轮之间通过皮带连接;底座的顶端两侧均固定设置有支撑耳,两组支撑耳之间连接设置有两组限位杆,两组限位杆的两端外侧均转动设置有卡爪,底座的顶端中部横向设置有与卡爪相配合的驱动组件,移动环的顶部截面呈t形结构,且移动环底部两侧
均开设有与螺纹杆相配合的内螺纹通孔,驱动装置包括转动块,转动块的正面固定设置有气缸,气缸的底端设置有驱动电机,驱动电机的底端设置有钻头,转动块的两侧内部均开设有开口槽,开口槽的内部卡接设置有限位块,且限位块远离转动块的一侧固定连接设置有固定块,固定块与滑动组件固定连接,转动块的中部外侧套设有蜗轮,且固定块的内部卡接设置有与蜗轮相啮合的蜗杆,蜗杆的顶部套设有调节旋钮。
9.进一步的,为了实现在术前及术中对钻头进行消毒,预处理装置包括与固定块底端固定连接的连杆,连杆的底端设置有步进电机,步进电机的输出端连接设置有扇形转盘;转盘的顶端开设有两组放置槽,两组放置槽的内部分别放置有消毒棉及涡形加热丝。
10.进一步的,为了便于安装并实现对钻头进行固定,滑动组件包括两组相互扣合的滑块,两组滑块之间的内轮廓与移动环的顶部外轮廓相同;且两组滑块之间通过若干固定螺栓固定连接,其中一组滑块的一侧连接设置有固定块,另一组滑块的一侧中部贯穿设置有锁紧螺栓。
11.进一步的,为了对患者腿部进行支撑,限位杆的外侧套设有若干支撑块,支撑块的顶端固定设置有弧形支撑垫,支撑垫的两侧延伸至卡爪的外侧。
12.进一步的,为了对夹紧力进行精准控制,卡爪包括一体成形的弧形板及转动部,弧形板的内侧设置有压力传感器;转动部的顶部贯穿设置有限位杆,且相互靠近的两组转动部的底部之间连接设置有拉伸弹簧,且转动部靠近驱动组件的一侧设置有弧形倒角。
13.进一步的,为了实现两组弧形板的自动夹紧,驱动组件包括两组同轴设置的转轴,且转轴与限位杆平行;两组转轴相互靠近的一端均固定套设有从动锥齿轮,其中一组转轴的一端套设有轴承,轴承的外侧套设有第一活动锥齿轮,第一活动锥齿轮靠近从动锥齿轮的一侧对称设置有两组连接部,两组连接部的一端均转动设置有与两组从动锥齿轮相啮合的第二活动锥齿轮;底座的顶端固定设置有与转轴相垂直的第二电机,第二电机的输出端设置有与第一活动锥齿轮相啮合的主动锥齿轮,两组转轴相互远离的一端均套设有伸缩块,且伸缩块设置于两组相互靠近的转动部的中部之间,拉伸弹簧位于伸缩块的下方。
14.进一步的,为了实现两组弧形板的同步收缩,伸缩块包括依次连接的限位部、扩张部及导向部;限位部的截面为矩形结构,且支撑耳的中部贯穿开设有与限位部相配合的矩形槽,扩张部以远离限位部的方向截面面积逐渐增大,导向部套设于转轴的外侧,导向部的圆周外侧螺旋贯穿开设有导向槽,转轴的一端竖直固定设置有与导向槽两侧内壁相切的导向块,且导向部与转轴之间为间隙配合。
15.本发明的有益效果为:1、本发明通过设置螺纹杆带动移动环移动,从而实现钻头水平方向上的移动,且通过采用第一电机带动,可以实现水平方向移动的精准度,另外通过采用滑动组件在移动环上移动,可以实现对钻头工作角度的调节,从而保证手术钻孔的精准性。
16.2、通过采用两组卡爪,可以保证在手术过程中对腿部夹持的稳定性,且发明通过在卡爪中设置压力传感器,可以将夹持力电信号传至控制盒从而对夹持力进行精准控制,进而避免对患者腿部造成二次伤害。
17.3、本发明的驱动组件采用差速器原理,两组转轴可以独立转动,从而保证两组伸缩块可以独立收缩,这样不仅可以实现两组卡爪可以独立工作,达到对腿部进行快速夹紧的效果,而且还可以保证两组卡爪的夹持力一致,从而进一步提高腿部夹持的稳定性。
18.4、通过设置扩张部,可以实现在扩张部的伸出时,两组卡爪进行同步靠近,在扩张部的收回时,两组卡爪在拉伸弹簧的作用下复位,从而实现自动夹紧,提高了工作效率。
19.5、本发明通过设置驱动装置,一方面可以通过气缸及驱动电机充分实现打孔功能,而且可以利用蜗轮与蜗杆的配合实现对钻头的角度进行多角度灵活调节。
20.6、通过设置预处理装置可以在打孔前及打孔过程中对钻头进行预处理,其中加热丝可以在术前对钻头进行加热消毒,消毒棉可以在术前及术中对钻头进行消毒,从而防止伤口感染。
21.附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
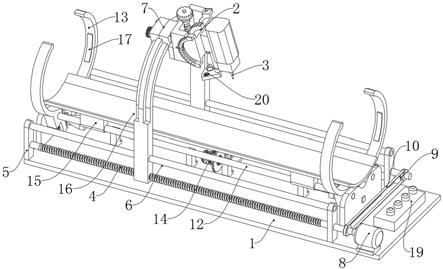
23.图1是根据本发明实施例的一种骨科手术定位打孔装置的轴测图之一;图2是根据本发明实施例的一种骨科手术定位打孔装置的轴测图之二;图3是根据本发明实施例的一种骨科手术定位打孔装置中驱动组件与支撑耳的配合示意图;图4是根据本发明实施例的一种骨科手术定位打孔装置中滑动组件与驱动装置的配合示意图之一;图5是根据本发明实施例的一种骨科手术定位打孔装置中滑动组件与驱动装置的配合示意图之二;图6是根据本发明实施例的一种骨科手术定位打孔装置中驱动组件的剖视图;图7是根据本发明实施例的一种骨科手术定位打孔装置中卡爪的结构示意图;图8是根据本发明实施例的一种骨科手术定位打孔装置中驱动组件的结构示意图之一;图9是根据本发明实施例的一种骨科手术定位打孔装置中驱动组件的结构示意图之二;图10是根据本发明实施例的一种骨科手术定位打孔装置中伸缩块的结构示意图;图11是图3中a处的局部放大图。
24.图中:1、底座;2、驱动装置;201、转动块;202、气缸;203、驱动电机;204、开口槽;205、限位块;206、固定块;207、蜗轮;208、蜗杆;209、调节旋钮;3、钻头;4、螺纹杆;5、第一轴承座;6、移动环;7、滑动组件;701、滑块;702、固定螺栓;703、锁紧螺栓;8、第一电机;9、皮带轮;10、皮带;11、支撑耳;12、限位杆;13、卡爪;1301、弧形板;1302、转动部;14、驱动组件;1401、转轴;1402、从动锥齿轮;1403、轴承;1404、第一活动锥齿轮;1405、连接部;1406、第二活动锥齿轮;1407、第二电机;1408、主动锥齿轮;1409、伸缩块;14091、限位部;14092、扩张部;14093、导向部;14094、导向槽;14095、导向块;15、支撑块;16、支撑垫;17、压力传感器;18、拉伸弹簧;19、控制盒;20、预处理装置;2001、连杆;2002、步进电机;2003、转盘;2004、放置
槽;2005、消毒棉;2006、加热丝。
25.具体实施方式
26.为进一步说明各实施例,本发明提供有附图,这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理,配合参考这些内容,本领域普通技术人员应能理解其他可能的实施方式以及本发明的优点,图中的组件并未按比例绘制,而类似的组件符号通常用来表示类似的组件。
27.根据本发明的实施例,提供了一种骨科手术定位打孔装置。
28.现结合附图和具体实施方式对本发明进一步说明,如图1-6所示,根据本发明实施例的骨科手术定位打孔装置,包括底座1及驱动装置2,驱动装置2的输出端连接设置有钻头3,底座1的上方横向对称设置有两组螺纹杆4,两组螺纹杆4均通过若干第一轴承座5与底座1的顶端连接,且两组螺纹杆4的外侧均套设有移动环6,移动环6的外侧通过滑动组件7连接设置有驱动装置2,其中一组螺纹杆4的一端连接设置有第一电机8,且两组螺纹杆4的一端均套设有皮带轮9,两组皮带轮9之间通过皮带10连接;底座1的顶端两侧均固定设置有支撑耳11,两组支撑耳11之间连接设置有两组限位杆12,两组限位杆12的两端外侧均转动设置有卡爪13,底座1的顶端中部横向设置有与卡爪13相配合的驱动组件14,移动环6的顶部截面呈t形结构,且移动环6底部两侧均开设有与螺纹杆4相配合的内螺纹通孔,驱动装置2包括转动块201,转动块201的正面固定设置有气缸202,气缸202的底端设置有驱动电机203,驱动电机203的底端设置有钻头3,转动块201的两侧内部均开设有开口槽204,开口槽204的内部卡接设置有限位块205,且限位块205远离转动块201的一侧固定连接设置有固定块206,固定块206与滑动组件7固定连接,转动块201的中部外侧套设有蜗轮207,且固定块206的内部卡接设置有与蜗轮207相啮合的蜗杆208,蜗杆208的顶部套设有调节旋钮209。
29.借助于上述技术方案,本发明通过设置螺纹杆4带动移动环6移动,从而实现钻头3水平方向上的移动,且通过采用第一电机8带动,可以实现水平方向移动的精准度,另外通过采用滑动组件7在移动环6上移动,可以实现对钻头3工作角度的调节,从而保证手术钻孔的精准性,通过设置驱动装置2,可以利用转动调节旋钮209实现对钻头3的工作角度进行微调。
30.在一个实施例中,预处理装置20包括与固定块206底端固定连接的连杆2001,连杆2001的底端设置有步进电机2002,步进电机2002的输出端连接设置有扇形转盘2003;转盘2003的顶端开设有两组放置槽2004,两组放置槽2004的内部分别放置有消毒棉2005及涡形加热丝2006,从而可以实现在术前及术中对钻头3进行消毒。
31.在一个实施例中,对于上述滑动组件7来说,包括两组相互扣合的滑块701,两组滑块701之间的内轮廓与移动环6的顶部外轮廓相同;且两组滑块701之间通过若干固定螺栓702固定连接,其中一组滑块701的一侧连接设置有固定块206,另一组滑块701的一侧中部贯穿设置有锁紧螺栓703,采用两组相互扣合的滑块701可以便于安装,其中锁紧螺栓703可以实现对钻头3进行固定,从而提高打孔稳定性。
32.在一个实施例中,如图7所示,限位杆12的外侧套设有若干支撑块15,支撑块15的顶端固定设置有弧形支撑垫16(支撑垫16可选用硅胶材质),支撑垫16的两侧延伸至卡爪13
的外侧,卡爪13包括一体成形的弧形板1301及转动部1302,弧形板1301的内侧设置有压力传感器17(型号:gzp170);转动部1302的顶部贯穿设置有限位杆12,且相互靠近的两组转动部1302的底部之间连接设置有拉伸弹簧18(拉伸弹簧18持续处于拉伸状态),且转动部1302靠近驱动组件14的一侧设置有弧形倒角,通过采用两组卡爪13,可以保证在手术过程中对腿部夹持的稳定性,且拉伸弹簧18可以实现两组弧形板1301的自动复位。
33.在一个实施例中,如图8-11所示,驱动组件14包括两组同轴设置的转轴1401(转轴1401通过若干支撑座与底座1连接),且转轴1401与限位杆12平行;两组转轴1401相互靠近的一端均固定套设有从动锥齿轮1402,其中一组转轴1401的一端套设有轴承1403,轴承1403的外侧套设有第一活动锥齿轮1404,第一活动锥齿轮1404靠近从动锥齿轮1402的一侧对称设置有两组连接部1405,两组连接部1405的一端均转动设置有与两组从动锥齿轮1402相啮合的第二活动锥齿轮1406;底座1的顶端固定设置有与转轴1401相垂直的第二电机1407,第二电机1407的输出端设置有与第一活动锥齿轮1404相啮合的主动锥齿轮1408,两组转轴1401相互远离的一端均套设有伸缩块1409,且伸缩块1409设置于两组相互靠近的转动部1302的中部之间,拉伸弹簧18位于伸缩块1409的下方,伸缩块1409包括依次连接的限位部14091、扩张部14092及导向部14093;限位部14091的截面为矩形结构,且支撑耳11的中部贯穿开设有与限位部14091相配合的矩形槽,扩张部14092以远离限位部14091的方向截面面积逐渐增大,导向部14093套设于转轴1401的外侧,导向部14093的圆周外侧螺旋贯穿开设有导向槽14094,转轴1401的一端竖直固定设置有与导向槽14094两侧内壁相切的导向块14095,且导向部14093与转轴1401之间为间隙配合。
34.驱动组件14的工作原理为:第二电机1407带动主动锥齿轮1408转动,主动锥齿轮1408转动带动第一活动锥齿轮1404在转轴1401上转动,第一活动锥齿轮1404通过两组第二活动锥齿轮1406带动两组从动锥齿轮1402转动,两组从动锥齿轮1402带动转轴1401转动,转轴1401两端的导向块14095通过在导向槽14094中转动带动伸缩块1409伸出。
35.为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
36.在实际应用时,控制盒19内部设置有plc控制面板,控制盒19外侧设置有若干控制按钮,提前通过plc控制面板设置压力传感器17的阈值,在手术时,控制盒19分别与驱动电机203、第一电机8、压力传感器17、步进电机2002及第二电机1407电连接,将患者腿部放置在支撑垫16上,并保证打孔位置在两组卡爪13之间,通过控制盒19启动第二电机1407,第二电机1407带动主动锥齿轮1408转动,主动锥齿轮1408转动带动第一活动锥齿轮1404在转轴1401上转动,第一活动锥齿轮1404通过两组第二活动锥齿轮1406带动两组从动锥齿轮1402转动,两组从动锥齿轮1402带动转轴1401转动,转轴1401两端的导向块14095通过在导向槽14094中转动带动伸缩块1409伸出,伸缩块1409通过扩张部14092的作用带动转动部1302转动,从而两组弧形板1301相互靠近对腿部进行夹紧,其中在夹持过程中若两组卡爪13的夹持力不一致,则会通过第二活动锥齿轮1406的自转实现自动调整,直至两组卡爪13的夹持力均达到预设值,此时第二电机1407停止转动(第二电机1407带动自锁功能);通过控制盒19启动第一电机8,第一电机8通过皮带10带动两组螺纹杆4同步转动,此时移动环6顺着螺纹杆4横向移动,直至钻头3移动至指定位置第一电机8停止(第一电机8带动自锁功能),利用滑动组件7将钻头3调整至合适角度并利用锁紧螺栓703进行固定;
驱动装置2的工作原理为:转动调节旋钮209,调节旋钮209带动蜗杆208转动,蜗杆208带动蜗轮207进行转动,蜗轮207带动转动块201转动一定角度,从而实现对钻头3的工作角度进行微调,且因蜗杆208与蜗轮207存在机械自锁,因此可以保证钻头3安装的更加稳定,同时在实际使用时开口槽204的外侧设置有刻度值,固定块206上固定有与刻度值配合的指针,从而实现对钻头3的精准调节。
37.综上所述,借助于本发明的上述技术方案,本发明通过设置螺纹杆4带动移动环6移动,从而实现钻头3水平方向上的移动,且通过采用第一电机8带动,可以实现水平方向移动的精准度,另外通过采用滑动组件7在移动环6上移动,可以实现对钻头3工作角度的调节,从而保证手术钻孔的精准性;通过采用两组卡爪13,可以保证在手术过程中对腿部夹持的稳定性,且发明通过在卡爪13中设置压力传感器17,可以将夹持力电信号传至控制盒19从而对夹持力进行精准控制,进而避免对患者腿部造成二次伤害;此外,本发明的驱动组件14采用差速器原理,两组转轴1401可以独立转动,从而保证两组伸缩块1409可以独立收缩,这样不仅可以实现两组卡爪13可以独立工作,达到对腿部进行快速夹紧的效果,而且还可以保证两组卡爪13的夹持力一致,从而进一步提高腿部夹持的稳定性;通过设置扩张部14092,可以实现在扩张部14092的伸出时,两组卡爪13进行同步靠近,在扩张部14092的收回时,两组卡爪13在拉伸弹簧18的作用下复位,从而实现自动夹紧,提高了工作效率;此外,本发明通过设置驱动装置2,一方面可以通过气缸202及驱动电机203充分实现打孔功能,而且可以利用蜗轮207与蜗杆208的配合实现对钻头3的角度进行多角度灵活调节;通过设置预处理装置20可以在打孔前及打孔过程中对钻头3进行预处理,其中加热丝2006可以在术前对钻头3进行加热消毒,消毒棉2005可以在术前及术中对钻头3进行消毒,从而防止伤口感染。
38.在本发明中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
39.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。