1.本发明涉及自动无人驾驶技术领域,具体涉及一种无人驾驶智能小车的控制方法。
背景技术:
2.无人驾驶汽车是通过车载传感系统感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,自动规划行车路线、控制车辆的转向和速度并控制车辆到达预定目的地的智能汽车。
3.现有技术中,无人驾驶车辆在行进的过程中,遇到障碍物会进行躲避,然而,对于突发事件的应变能力较差,无法根据实际路况,对无人驾驶车辆进行控制,容易发生交通事故,安全性较差。
技术实现要素:
4.有鉴于此,本发明要解决的问题是提供一种无人驾驶智能小车的控制方法。
5.为解决上述技术问题,本发明采用的技术方案是:
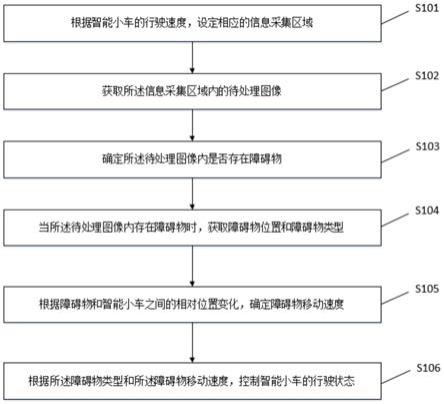
6.一种无人驾驶智能小车的控制方法,包括:
7.s101、根据智能小车的行驶速度,设定相应的信息采集区域;
8.s102、获取所述信息采集区域内的待处理图像;
9.s103、确定所述待处理图像内是否存在障碍物;
10.s104、当所述待处理图像内存在障碍物时,获取障碍物位置和障碍物类型;
11.s105、根据障碍物和智能小车之间的相对位置变化,确定障碍物移动速度;
12.s106、根据所述障碍物类型和所述障碍物移动速度,控制智能小车的行驶状态。
13.可选地,在本发明中,在所述s103之前,还包括获取不含障碍物的初始图像集,所述初始图像集包括多个初始图像。
14.可选地,在本发明中,所述s103具体包括:
15.计算每张所述初始图像与所述待处理图像的相似度;
16.确定出与所述待处理图像的相似度最高的所述初始图像;
17.判断所述初始图像与所述待处理图像的相似度是否大于第一阈值;
18.若是,则判定所述待处理图像中不存在障碍物;
19.若否,则所述待处理图像中存在障碍物。
20.可选地,在本发明中,所述s102还包括对所述待处理图像进行滤波处理。
21.可选地,在本发明中,所述障碍物类型包括行人、车辆和静止障碍物。
22.可选地,在本发明中,所述s104具体包括:
23.当所述待处理图像内存在障碍物且障碍物类型为行人时,以行人为中心确定搜索区域;
24.判断所述搜索区域内是否存在移动物体以及用于连接移动物体和行人的牵引绳;
25.若是,判定所述障碍物类型从行人升级为行人牵引宠物模型;
26.若否,判定所述障碍物类型为行人。
27.可选地,在本发明中,所述搜索区域为:以行人为圆心、第一参数为半径的区域。
28.可选地,在本发明中,所述s106具体包括:
29.当障碍物类型为行人且行人的移动速度大于第一预设速度值时,控制智能小车紧急刹车;
30.当障碍物类型为行人牵引宠物模型且行人或宠物的移动速度大于第一预设速度值时,控制智能小车紧急刹车。
31.可选地,在本发明中,所述s106还包括:
32.当障碍物类型为静止障碍物且该静止障碍物处于道路的中央时,计算静止障碍物与道路一侧之间的第一距离,若第一距离大于智能小车的宽度,控制智能小车向左或向右转向,以避让静止障碍物;若第一距离小于等于智能小车的宽度,智能小车重新进行路线规划;
33.当障碍物类型为静止障碍物且该静止障碍物处于道路的左侧时,计算静止障碍物与道路右侧之间的第二距离,若第二距离大于智能小车的宽度,控制智能小车向右转向,以避让静止障碍物;若第二距离小于等于智能小车的宽度,智能小车重新进行路线规划;
34.当障碍物类型为静止障碍物且该静止障碍物处于道路的右侧时,计算静止障碍物与道路左侧之间的第三距离,若第三距离大于智能小车的宽度,控制智能小车向左转向,以避让静止障碍物;若第三距离小于等于智能小车的宽度,智能小车重新进行路线规划。
35.可选地,在本发明中,所述s106还包括:
36.当障碍物类型为车辆且该车辆的移动速度大于第二预设速度值时,控制智能小车的减速行驶。
37.本发明具有的优点和积极效果是:
38.如此,在本发明中,通过获取的待处理图像,从待处理图像中识别出障碍物,基于障碍物类型和障碍物移动速度,控制智能小车转向、减速或紧急刹车等操作,实现智能小车在未知环境下的自动路径规划,从而避免智能小车与障碍物发生碰撞,保证智能小车能够安全行驶至目的地。
附图说明
39.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
40.图1是本发明的一种无人驾驶智能小车的控制方法的流程图。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上
或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
43.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
44.一种无人驾驶智能小车的控制方法,如图1所示,包括:
45.s101、根据智能小车的行驶速度,设定相应的信息采集区域;
46.s102、获取所述信息采集区域内的待处理图像;
47.s103、确定所述待处理图像内是否存在障碍物;
48.s104、当所述待处理图像内存在障碍物时,获取障碍物位置和障碍物类型;
49.s105、根据障碍物和智能小车之间的相对位置变化,确定障碍物移动速度;
50.s106、根据所述障碍物类型和所述障碍物移动速度,控制智能小车的行驶状态。
51.如此,在本发明中,通过获取的待处理图像,从待处理图像中识别出障碍物,基于障碍物类型和障碍物移动速度,控制智能小车转向、减速或紧急刹车等操作,实现智能小车在未知环境下的自动路径规划,从而避免智能小车与障碍物发生碰撞,保证智能小车能够安全行驶至目的地。
52.其中,在s101中,智能小车的行驶速度不同,对应的信息采集区域不同。例如,智能小车的行驶速度为100迈时,对应的信息采集区域可以但不限于为智能小车前方五十米的信息采集区域;智能小车的行驶速度为80迈时,对应的信息采集区域可以但不限于为智能小车前方四十米的信息采集区域。
53.可选地,在本发明中,在所述s103之前,还包括获取不含障碍物的初始图像集,所述初始图像集包括多个初始图像。
54.需要说明的是,初始图像也会经过滤波处理,因此,能够有效的去除初始图像中的各种干扰噪声,获得效果较佳的清晰初始图像。
55.可选地,在本发明中,所述s103具体包括:
56.计算每张所述初始图像与所述待处理图像的相似度;
57.确定出与所述待处理图像的相似度最高的所述初始图像;
58.判断所述初始图像与所述待处理图像的相似度是否大于第一阈值;
59.若是,则判定所述待处理图像中不存在障碍物;
60.若否,则所述待处理图像中存在障碍物。
61.说明一点,初始图像集中包括各个路段的图像包,每个图像包中包括多个位置处的初始图像。
62.其中,每一图像包均对应一个经纬度范围。
63.智能小车在行进的过程中,在获取待处理图像的同时,还需要实时获取智能小车的实际位置,判断智能小车的实际位置落在哪个经纬度范围内,从而调取该经纬度范围对应的图像包,通过计算待处理图像和图像包内的多个初始图像的相似度,有利于后续确定
待处理图像内是否存在障碍物。
64.如下将具体说明如何确定待处理图像内是否存在障碍物。
65.例如:以图像包包括五张不同位置处的初始图像为例进行说明,五张初始图像分别为第一初始图像、第二初始图像、第三初始图像、第四初始图像和第五初始图像。
66.具体地,计算第一初始图像和待处理图像的相似度h1;
67.计算第二初始图像和待处理图像的相似度h2;
68.计算第三初始图像和待处理图像的相似度h3;
69.计算第四初始图像和待处理图像的相似度h4;
70.计算第五初始图像和待处理图像的相似度h5;
71.若h5》h4》h3》h2》h1,那么,确定出第五初始图像与待处理图像的相似度最高;
72.当第五初始图像与待处理图像的相似度大于第一阈值时,则表明待处理图像中不存在障碍物;
73.当第五初始图像与待处理图像的相似度小于第一阈值时,则表明待处理图像中存在障碍物;
74.因此,在确定出待处理图像中存在障碍物后,根据待处理图像不同于第五初始图像的像素区域确定障碍物类型,具体地,像素区域即为障碍物的轮廓信息,可以根据障碍物的轮廓信息确定出障碍物类型;
75.并且,根据待处理图像不同于第五初始图像的像素区域的中心点确定障碍物位置,具体地,可以确定出中心点在待处理图像中的位置坐标,而该坐标位置即为障碍物位置。
76.在确定出障碍物类型和障碍物位置后,有利于后续控制智能小车的行驶状态。
77.如此,在本发明中,智能小车不断行进时,根据智能小车的实际位置,调取与智能小车当前位置对应的初始图像,并且,通过计算初始图像与待处理图像之间的相似度,确定待处理图像内是否包含障碍物,因此,加快了识别障碍物的速度,减少了计算量。
78.可选地,在本发明中,所述s102还包括对所述待处理图像进行滤波处理。
79.如此,在计算待处理图像和初始图像的相似度时,提高了数据的准确性,有利于后续确定出待处理图像内是否存在障碍物。
80.可选地,在本发明中,所述障碍物类型包括行人、车辆和静止障碍物。
81.可选地,在本发明中,所述s104具体包括:
82.当所述待处理图像内存在障碍物且障碍物类型为行人时,以行人为中心确定搜索区域;
83.判断所述搜索区域内是否存在移动物体以及用于连接移动物体和行人的牵引绳;
84.若是,判定所述障碍物类型从行人升级为行人牵引宠物模型;
85.若否,判定所述障碍物类型为行人。
86.可选地,在本发明中,所述搜索区域为:以行人为圆心、第一参数为半径的区域。
87.例如,以第一参数为2米为例进行说明。
88.当待处理图像内存在行人时,在以行人为圆心、第一参数2米为半径的搜索区域进行搜索,确定搜索区域内是否存在移动物体以及用于连接移动物体和行人的牵引绳;
89.若存在,表明当前的障碍物类型从行人升级为行人牵引宠物模型;
90.若不存在,表明当前的障碍物类型为行人。
91.可选地,在本发明中,所述s106具体包括:
92.当障碍物类型为行人且行人的移动速度大于第一预设速度值时,控制智能小车紧急刹车;
93.当障碍物类型为行人牵引宠物模型且行人或宠物的移动速度大于第一预设速度值时,控制智能小车紧急刹车。
94.其中,第一预设速度值可以根据实际需求进行设定,提高了设计的灵活性,以满足不同情况的需求。
95.如下将通过举例进行具体说明。
96.例1和例2的障碍物类型均为行人。
97.例1,第一预设速度值可以设为5千米每小时,当行人的移动速度大于第一预设速度值时,智能小车紧急刹车;
98.例2,第一预设速度值可以设为3.5千米每小时,当行人的移动速度大于第一预设速度值时,智能小车速度减半,具体地,当前车速为60迈,则智能小车降速至30迈。
99.例3和例4的障碍物类型均为行人牵引宠物模型。
100.例3,第一预设速度值可以设为5千米每小时,当行人或宠物的移动速度大于第一预设速度值时,控制智能小车紧急刹车;
101.例4,第一预设速度值可以设为3.5千米每小时,当行人或宠物的移动速度大于第一预设速度值时,智能小车速度减半,具体地,当前车速为60迈,则智能小车降速至30迈。
102.说明一点,若障碍物类型为行人,在智能小车紧急刹车后再次启动时,需要保证智能小车在行进的过程中智能小车的宽度与以行人为圆心、第一参数为半径的搜索区域不相交,因此,避免智能小车与行人碰撞事故的发生。
103.此外,若障碍物类型为行人牵引宠物模型,在智能小车紧急刹车后再次启动时,需要保证智能小车在行进的过程中智能小车的宽度与以行人为圆心、第二参数为半径的搜索区域不相交,其中,第二参数为第一参数和牵引绳的长度总和,也就是说,在本发明中,在智能小车行进时考虑了牵引绳这一因素,因此,即使宠物围绕行人在道路中来回跑动,智能小车也不会轧到宠物,提高了安全性。
104.可选地,在本发明中,所述s106还包括:
105.当障碍物类型为静止障碍物且该静止障碍物处于道路的中央时,计算静止障碍物与道路一侧之间的第一距离,若第一距离大于智能小车的宽度,控制智能小车向左或向右转向,以避让静止障碍物;若第一距离小于等于智能小车的宽度,智能小车重新进行路线规划;
106.当障碍物类型为静止障碍物且该静止障碍物处于道路的左侧时,计算静止障碍物与道路右侧之间的第二距离,若第二距离大于智能小车的宽度,控制智能小车向右转向,以避让静止障碍物;若第二距离小于等于智能小车的宽度,智能小车重新进行路线规划;
107.当障碍物类型为静止障碍物且该静止障碍物处于道路的右侧时,计算静止障碍物与道路左侧之间的第三距离,若第三距离大于智能小车的宽度,控制智能小车向左转向,以避让静止障碍物;若第三距离小于等于智能小车的宽度,智能小车重新进行路线规划。
108.其中,静止障碍物可以理解为石墩等静态障碍物。
109.此外,当第一距离、第二距离和第三距离均小于智能小车的宽度时,智能小车停止前进,并且,需要更新全局路线,因此,能够防止在智能小车行进过程中被障碍物卡死。
110.如此,当待处理图像内存在静止障碍物时,根据静止障碍物所处的位置,智能小车进行转向,以避让静止障碍物,避免撞击静止障碍物。
111.可选地,在本发明中,所述s106还包括:
112.当障碍物类型为车辆且该车辆的移动速度大于第二预设速度值时,控制智能小车的减速行驶。
113.其中,第二预设速度值可以根据实际需求进行设定,提高了设计的灵活性,以满足不同情况的需求。
114.例5,第二预设速度值可以设为80千米每小时,当车辆的移动速度大于第二预设速度值时,智能小车紧急刹车;
115.例6,第二预设速度值可以设为60千米每小时,当车辆的移动速度大于第二预设速度值时,智能小车减速百分之三十;其中,若当前车速为100迈,则智能小车降速至70迈。
116.例7,第二预设速度值可以设为50千米每小时,当车辆的移动速度大于第二预设速度值时,智能小车减速百分之四十;其中,若当前车速为100迈,则智能小车降速至60迈。
117.如此,在本发明中,根据车辆的不同移动速度,控制智能小车降速或紧急停止,从而保证了智能小车的安全行驶,避免与车辆发生碰撞。
118.本发明的工作原理和工作过程如下:
119.获取不含障碍物的初始图像集,初始图像集包括多个初始图像,每一初始图像均进行滤波处理;根据智能小车的当前的行驶速度,在相应的信息采集区域内获取待处理图像,对待处理图像进行滤波处理;计算每张初始图像与待处理图像的相似度,确定出与待处理图像的相似度最高的初始图像,判断该初始图像与待处理图像的相似度是否大于第一阈值,若是,则判定待处理图像中不存在障碍物,若否,则待处理图像中存在障碍物;在确定出处理图像内存在障碍物后,获取障碍物位置和障碍物类型,其中,障碍物类型包括行人、车辆和静止障碍物;当待处理图像内存在障碍物且障碍物类型为行人时,以行人为圆心、第一参数为半径的区域确定为搜索区域,判断搜索区域内是否存在移动物体以及用于连接移动物体和行人的牵引绳,若是,判定障碍物类型从行人升级为行人牵引宠物模型,若否,判定障碍物类型为行人;当障碍物类型为行人且行人的移动速度大于第一预设速度值时,控制智能小车紧急刹车;当障碍物类型为行人牵引宠物模型且行人或宠物的移动速度大于第一预设速度值时,控制智能小车紧急刹车;当障碍物类型为静止障碍物,根据静止障碍物的位置,控制控制智能小车转向;当障碍物类型为车辆且该车辆的移动速度大于第二预设速度值时,控制智能小车的减速行驶。
120.如此,在本发明中,通过获取的待处理图像,从待处理图像中识别出障碍物,基于障碍物类型和障碍物移动速度,控制智能小车转向、减速或紧急刹车等操作,实现智能小车在未知环境下的自动路径规划,从而避免智能小车与障碍物发生碰撞,保证智能小车能够安全行驶至目的地。
121.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。