1.本发明涉及考虑驾驶员接受程度的信号交叉口车速二次引导方法,属于智能交通技术领域。
背景技术:
2.驾驶员对车速引导接受程度的存在可能使速度引导策略实施效果不佳。如果能获取驾驶员的接受程度,再以驾驶员接受程度为依据进行引导速度的修正,能够保证策略实施有效性,使车辆不停车通过信号交叉口,提高通行效率,并实现节油减排的引导目标。
3.现有信号交叉口速度引导方法的研究通常认为驾驶员能够完全接受速度引导信息,百分百执行速度引导策略;虽然这种方式能够获得一定的引导效果,但忽略了驾驶员接受程度的影响,造成通行效率不高并且节油减排的效果差。而部分速度引导方法虽然将驾驶接受程度考虑在内,但仅分析了接受程度的影响,未能采取相关措施来减缓这种影响。也就是说,受到驾驶员接受程度的影响,目前的速度引导技术很难应用于实际场景。
技术实现要素:
4.针对现有速度引导方法未考虑驾驶员对速度引导接受程度的影响,造成通行效率差及引导效果差的问题,本发明提供一种考虑驾驶员接受程度的信号交叉口车速二次引导方法。
5.本发明的一种考虑驾驶员接受程度的信号交叉口车速二次引导方法,包括,
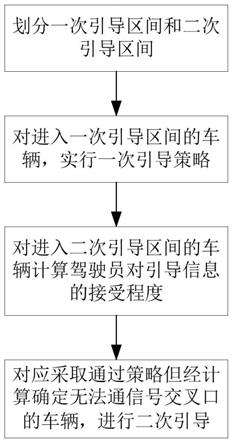
6.s1、将信号交叉口的引导区间划分为一次引导区间和二次引导区间,一次引导区间包括二次引导区间,并且一次引导区间和二次引导区间的起点相距设定距离,终点均为信号交叉口;
7.s2、对进入一次引导区间的车辆,根据车辆满足的约束条件在信号通行时段内分别实行一次加速引导通过、一次减速引导通过和一次减速引导停车策略;
8.s3、对执行一次加速引导通过和一次减速引导通过策略的车辆,在进入二次引导区间时,采用车联网系统根据车辆的时空位置计算驾驶员在当前引导过程中对引导信息的接受程度;
9.s4、根据当前车辆速度、红灯时段剩余时间或绿灯时段剩余时间,判断执行一次加速引导通过和一次减速引导通过策略的车辆,能否在此次信号通行时段内通过信号交叉口;若否,则再根据车辆满足的当前约束条件,基于驾驶员对引导信息的接受程度对车辆进行二次引导,使车辆在此次通行时段内通过信号交叉口。
10.根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,一次引导区间长度为300至500米;二次引导区间长度为150至250米。
11.根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,步骤s2中,执行一次加速引导通过策略的车辆的约束条件为:
[0012][0013]
式中l为信号交叉口停车线位置;xn(t)为t时刻车辆所在位置;tg为绿灯结束时刻;t
safe
为车辆安全车头时距;v
max
为车辆最大速度;η1为引导速度余量;n(t)为前方排队车辆数;hc为车辆停车车头间距;t
qd
为车辆进入一次引导区间时前方排队车辆尾车启动所需的时间;
[0014]
当车辆与前方排队车辆尾车距离大于设定阈值时,运动特征描述为:
[0015][0016]
式中vn(t)为t时刻当前车辆速度,α为驾驶员的敏感系数,γ为驾驶员对引导信息的接受程度,v(δxn(t))为t时刻当前车辆的最优速度;δxn(t)为t时刻当前车辆与前方排队车辆尾车的车头间距:
[0017]
δxn(t)=x
n 1
(t)-xn(t),
[0018]
式中x
n 1
(t)为t时刻前方排队车辆尾车所在位置;
[0019]
当车辆与前方排队车辆尾车距离小于或等于设定阈值时,运动特征描述为:
[0020][0021]
式中λ为速度差的影响因子;
[0022]
δvn(t)为t时刻当前车辆与前方排队车辆尾车的速度差:
[0023]
δvn(t)=v
n 1
(t)-vn(t);
[0024]
式中v
n 1
(t)为t时刻前方排队车辆尾车速度;
[0025]
当驾驶员对引导信息的接受程度γ小于1时,执行一次加速引导通过策略的车辆未能充分执行一次加速引导通过策略;驾驶员对引导信息的接受程度γ大于1时,执行一次加速引导通过策略的车辆属于过度执行一次加速引导通过策略。
[0026]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,步骤s2中,执行一次减速引导通过策略的车辆的约束条件为:
[0027][0028]
式中v
min
为当前车辆最小速度;η2为第一引导裕量,tr为红灯结束时刻;
[0029]
对当前车辆按速度引导信息v(
·
)进行引导,后续车辆采取跟驰模式:
[0030][0031]
当运动特征描述为:
[0032][0033]
此时执行一次减速引导通过策略的当前车辆未能充分执行一次减速引导策略;
[0034]
当运动特征描述为:
[0035][0036]
此时执行一次减速引导通过策略的当前车辆属于过度执行一次减速引导策略。
[0037]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,步骤s2中,执行一次减速引导停车策略的车辆的约束条件为:
[0038]
对当前车辆按速度引导信息v(
·
)进行引导:
[0039]
v(
·
)=min(v
min
η3,v(l-xn(t)-n(t)*hc),v(δxn(t))),
[0040]
式中η3为第二引导裕量,v(l-xn(t)-n(t)*hc)为根据当前车辆位置及前方排队车辆信息得到的优化速度;
[0041]
当运动特征描述为:
[0042][0043]
此时执行一次减速引导停车策略的车辆未能充分执行一次减速引导停车策略;
[0044]
当运动特征描述为:
[0045][0046]
此时执行一次减速引导停车策略的车辆属于过度执行一次减速引导停车策略。
[0047]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,步骤s4中,对于未能充分执行一次加速引导通过策略和未能充分执行一次减速引导通过策略的车辆,判定能否在此次信号通行时段内通过信号交叉口。
[0048]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,对于未能充分执行一次加速引导通过策略的车辆,若不能在此次信号通行时段内通过信号交叉口,会在信号通行时段的信号灯由绿转红时停车;对于未能充分执行一次减速引导策略的车辆,若不能在此次信号通行时段内通过信号交叉口,会提前到达信号交叉口处停车再启动。
[0049]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,对未能充分执行一次加速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,车辆满足的当前约束条件为:
[0050][0051]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,对未能充分执行一次加速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,当车辆满足如下约束条件时:
[0052][0053]vfree
为自由流速度;t
qd2
为车辆进入二次引导区间时前方排队车辆尾车启动所需的时间;
[0054]
对车辆进行二次引导,二次引导速度v(
·
)为:
[0055]
v(
·
)=1.1v
max
;
[0056]
此时运动特征描述为:
[0057][0058]
根据本发明的考虑驾驶员接受程度的信号交叉口车速二次引导方法,对未能充分执行一次减速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,当车辆满足如下约束条件时:
[0059][0060]
对车辆进行二次引导,二次引导速度v(
·
)为:
[0061][0062]
此时运动特征描述为:
[0063][0064]
本发明的有益效果:本发明考虑到驾驶员对车速引导信号的接受程度,对车辆进行二次引导,从而达到提高车辆通行效率,节能减排的效果。
[0065]
本发明方法当驾驶员进入一次引导区间时,不考虑驾驶员接受程度,对驾驶员实施一次速度引导,并根据车辆时空位置获取驾驶员接受程度;当驾驶员进入二次引导区间时,根据一次引导策略实施情况获取驾驶员接受程度,对驾驶员实施二次速度引导;以跟驰模型为基础提出两次引导对应的引导模型。本发明能够较好的减少接受程度对速度引导效果的影响,使车辆顺利不停车通过信号交叉口,有效提高信号交叉口车辆通行效率、减少油耗及排放。
[0066]
本发明考虑二次引导及驾驶员接受程度,对信号交叉口处车辆进行引导,有效实现了节油减排的目的,能够适用于实际道路交通场景,减缓了接受程度对引导效果的影响,能够保证速度引导的有效性、策略实施的交通效益及环境效益。
附图说明
[0067]
图1是本发明所述考虑驾驶员接受程度的信号交叉口车速二次引导方法的流程图;
[0068]
图2是具体实施例中无速度引导情况下,车辆的运行轨迹图;图中position/m,表示位置/米,t/s表示时间/秒;
[0069]
图3是具体实施例中无速度引导情况下,车辆的加速度变化示意图;图中a表示加速度;
[0070]
图4是具体实施例中无速度引导情况下,车辆的速度变化示意图;图中v表示速度;
[0071]
图5是具体实施例中,设定γ=1时,车辆在一次引导情况下的运行轨迹图;
[0072]
图6是具体实施例中,设定γ=1时,车辆在一次引导情况下的加速度变化示意图;
[0073]
图7是具体实施例中,设定γ=1时,车辆在一次引导情况下的速度变化示意图;
[0074]
图8是具体实施例中,设定γ=0.8时,车辆在一次引导情况下的运行轨迹图;
[0075]
图9是具体实施例中,设定γ=0.8时,车辆在一次引导情况下的加速度变化示意
图;
[0076]
图10是具体实施例中,设定γ=0.8时,车辆在一次引导情况下的速度变化示意图;
[0077]
图11是具体实施例中,设定γ=0.8时,车辆在二次引导情况下的运行轨迹图;
[0078]
图12是具体实施例中,设定γ=0.8时,车辆在二次引导情况下的加速度变化示意图;
[0079]
图13是具体实施例中,设定γ=0.8时,车辆在二次引导情况下的速度变化示意图;
[0080]
图14是具体实施例中,无速度引导下及设定γ=1时,车队燃油消耗情况示意图;
[0081]
图15是具体实施例中,设定γ=0.8时,车队在一次引导情况下及二次引导情况下的燃油消耗情况示意图;
[0082]
图16是具体实施例中,无速度引导下及设定γ=1时,第十一辆车至第十三辆车的燃油消耗情况示意图;
[0083]
图17是具体实施例中,设定γ=0.8时,第十一辆车及第十三辆车在一次引导情况下及二次引导情况下的燃油消耗情况示意图。
具体实施方式
[0084]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0085]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0086]
下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0087]
具体实施方式一、结合图1所示,本发明提供了一种考虑驾驶员接受程度的信号交叉口车速二次引导方法,包括,
[0088]
s1、将信号交叉口的引导区间划分为一次引导区间和二次引导区间,一次引导区间包括二次引导区间,并且一次引导区间和二次引导区间的起点相距设定距离,终点均为信号交叉口;
[0089]
s2、对进入一次引导区间的车辆,根据车辆满足的约束条件在信号通行时段内分别实行一次加速引导通过、一次减速引导通过和一次减速引导停车策略;
[0090]
s3、对执行一次加速引导通过和一次减速引导通过策略的车辆,在进入二次引导区间时,采用车联网系统根据车辆的时空位置计算驾驶员在当前引导过程中对引导信息的接受程度;
[0091]
s4、根据当前车辆速度、红灯时段剩余时间或绿灯时段剩余时间,判断执行一次加速引导通过和一次减速引导通过策略的车辆,能否在此次信号通行时段内通过信号交叉口;即判断不充分执行速度引导策略的车辆能否实现速度引导目标;若否,则再根据车辆满足的当前约束条件,基于驾驶员对引导信息的接受程度对车辆进行二次引导,使车辆在此次通行时段内通过信号交叉口。
[0092]
二次引导策略包括二次加速引导通过和二次减速引导通过。
[0093]
本实施方式中,在一个信号通行时段内,对于运行中的车辆进行能否直接通过信号交叉口的判断。对于经判断能够直接通过信号交叉口的车辆,实行一次加速引导通过和一次减速引导通过策略;对于经判断不能直接通过信号交叉口的车辆,实行一次减速引导停车策略。而对于经判断能够直接通过信号交叉口的车辆,由于车辆驾驶员对车速引导信息的接受程度不同,可能出现对引导信息执行不充分或过度执行的结果,也存在精准执行的结果,对精准执行和过度执行引导信息的车辆,无需进一步判断,其直接通过信号交叉口。而对于引导信息执行不充分的车辆,会发生在一个信号通行时段内无法顺利通过信号交叉口的状况。对此类车辆,若要在同一个信号通行时段内继续实现顺利通过信号交叉口的目标,则需要在后续的时间段内调整车速引导策略。因此,将引导区间进行了划分,也就是在一个信号通行时段内,当车辆由一次引导区间进入二次引导区间时,假设当前信号通行时段过去一半时间,由前半段时间车辆的运行状态可获得车辆驾驶员对引导信息的接受程度结果,此时,基于驾驶员对引导信息的接受程度对车辆的引导信息进行调整,使车辆可以调整后的速度在后一半时段内顺利通过信号交叉口,从而实现对车辆的二次引导。
[0094]
作为示例,一次引导区间长度为300至500米;二次引导区间长度为150至250米。
[0095]
进一步,步骤s2中,为使车辆尽快通过信号交叉口,执行一次加速引导通过策略的车辆的约束条件为:
[0096][0097]
式中l为信号交叉口停车线位置;xn(t)为t时刻车辆所在位置;tg为绿灯结束时刻;t
safe
为车辆安全车头时距;v
max
为车辆最大速度;η1为引导速度余量,可弥补加速所需时间带来的影响;n(t)为前方排队车辆数;hc为车辆停车车头间距;t
qd
为车辆进入一次引导区间时前方排队车辆尾车启动所需的时间;
[0098]
当车辆与前方排队车辆尾车距离大于设定阈值时,即相距较远时,运动特征描述为:
[0099][0100]
式中vn(t)为t时刻当前车辆速度,α为驾驶员的敏感系数,γ为驾驶员对引导信息的接受程度,v(δxn(t))为t时刻当前车辆的最优速度;δxn(t)为t时刻当前车辆与前方排队车辆尾车的车头间距:
[0101]
δxn(t)=x
n 1
(t)-xn(t),
[0102]
式中x
n 1
(t)为t时刻前方排队车辆尾车所在位置;
[0103]
当车辆与前方排队车辆尾车距离小于或等于设定阈值时,即相距较近时,运动特征描述为:
[0104][0105]
式中λ为速度差的影响因子;
[0106]
δvn(t)为t时刻当前车辆与前方排队车辆尾车的速度差:
[0107]
δvn(t)=v
n 1
(t)-vn(t);
[0108]
式中v
n 1
(t)为t时刻前方排队车辆尾车速度;
[0109]
当驾驶员对引导信息的接受程度γ小于1时,执行一次加速引导通过策略的车辆未能充分执行一次加速引导通过策略;驾驶员对引导信息的接受程度γ大于1时,执行一次加速引导通过策略的车辆属于过度执行一次加速引导通过策略。
[0110]
步骤s2中,减速引导通过策略的目的为使原本需要减速停车再启动的车辆不停车顺利通过信号交叉口,执行一次减速引导通过策略的车辆的约束条件为:
[0111][0112]
式中v
min
为当前车辆最小速度;η2为第一引导裕量,防止提供的速度引导信息过于接近道路限速;tr为红灯结束时刻;
[0113]
对当前车辆按速度引导信息v(
·
)进行引导,后续车辆采取传统跟驰模式:
[0114][0115]
当运动特征描述为:
[0116][0117]
此时执行一次减速引导通过策略的当前车辆未能充分执行一次减速引导策略;
[0118]
当运动特征描述为:
[0119][0120]
此时执行一次减速引导通过策略的当前车辆属于过度执行一次减速引导策略。
[0121]
步骤s2中,执行一次减速引导停车策略的车辆既不满足加速引导通过,也不满足减速引导通过的约束条件,为使其缓慢减速停车,避免紧急制动,其约束条件为:
[0122]
对当前车辆按速度引导信息v(
·
)进行引导:
[0123]
v(
·
)=min(v
min
η3,v(l-xn(t)-n(t)*hc),v(δxn(t))),
[0124]
式中η3为第二引导裕量,可防止提供的速度引导信息过于接近道路限速,v(l-xn(t)-n(t)*hc)为根据当前车辆位置及前方排队车辆信息得到的优化速度;
[0125]
当运动特征描述为:
[0126][0127]
此时执行一次减速引导停车策略的车辆未能充分执行一次减速引导停车策略;
[0128]
当运动特征描述为:
[0129][0130]
此时执行一次减速引导停车策略的车辆属于过度执行一次减速引导停车策略。
[0131]
在一次加速引导通过和一次减速引导通过的执行中,对于过度执行速度引导策略的车辆能够通过自身速度调整实现引导策略的目标,无需对其进行考虑。
[0132]
再进一步,步骤s4中,对于未能充分执行一次加速引导通过策略和未能充分执行
一次减速引导通过策略的车辆,依然存在能够通过或不能通过信号交叉口两种情形,因此,需要判定车辆能否在此次信号通行时段内通过信号交叉口。
[0133]
对于未能充分执行一次加速引导通过策略的车辆,若不能在此次信号通行时段内通过信号交叉口,可能会在信号通行时段的信号灯由绿转红时停车;对于未能充分执行一次减速引导策略的车辆,若不能在此次信号通行时段内通过信号交叉口,可能会提前到达信号交叉口处停车再启动。
[0134]
再进一步,对未能充分执行一次加速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,车辆满足的当前约束条件为:
[0135][0136]
对未能充分执行一次加速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,当车辆满足如下约束条件时:
[0137][0138]vfree
为自由流速度;t
qd2
为车辆进入二次引导区间时前方排队车辆尾车启动所需的时间;
[0139]
对车辆进行二次引导,二次引导速度v(
·
)为:
[0140]
v(
·
)=1.1v
max
;
[0141]
此时运动特征描述为:
[0142][0143]
可使其不停车通过。
[0144]
对未能充分执行一次减速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,当车辆满足如下约束条件时:
[0145][0146]
对车辆进行二次引导,二次引导速度v(
·
)为:
[0147][0148]
此时运动特征描述为:
[0149][0150]
可使其不停车通过。
[0151]
具体实施例:
[0152]
设定一次引导区间长度为300m,二次引导区间长度为150m,车辆数为15辆,初始车头间距为100m,一个信号周期包含绿灯时长39s,红灯时长50s,车辆最大速度为16.66m/s,最小速度为5.56m/s。
[0153]
分别进行无速度引导、γ=1驾驶员接受一次引导、γ=0.8驾驶员接受一次引导
和二次引导四种情况下,进行车辆轨迹、速度、加速度、油耗及排放的分析,获得相应的附图如图2至图13,进而可得到油耗及排放特性。
[0154]
从图2至图7中可以看出,无速度引导下的前三辆车能够顺利通过信号交叉口,第四辆车至第十一辆车均经过了停车再启动过程,第十二辆车、第十三辆车速度变化范围较大,车队整体的加速度变化情况、速度变化情况较大。γ=1时驾驶员接受一次引导下的第四辆车采取加速通过策略可不停车通过信号交叉口,第五辆车至第十辆车采取减速引导停车策略提前减速,平滑车辆运行轨迹,避免急刹车,第十一辆车至第十三辆车采取减速引导通过策略不停车顺利通过信号交叉口,车队整体的加速度变化情况、速度变化情况较小,运行轨迹较为平滑。
[0155]
无速度引导及γ=1驾驶员接受一次引导两种情况下,车队中第四辆车由“停车再启动”变为“加速不停车顺利通过”,第十一辆车由“停车再启动”变为“减速不停车顺利通过”,其余车辆的速度变化、加速度变化情况均减小,表明信号交叉口速度引导策略实施能够产生较好的交通效益、环境效益。
[0156]
从图5至图10中可以看出,当驾驶员不充分执行速度引导策略时,即γ=0.8驾驶员接受一次引导情况下,采取加速引导通过策略的第四辆车受接受程度影响无法不停车顺利通过信号交叉口,而是先加速后急剧制动再停车启动,导致加速引导通过策略失效,同时造成了额外的油耗及排放;对于采取减速引导停车策略的第五辆车至第十辆车,接受程度对其影响不大,仅是使驾驶员以一个略高于引导速度的速度提前到达信号交叉口并减速停车;对于采取减速引导通过策略的第十一辆车,接受程度对其及后续的第十二、第十三辆车影响较大,这三辆车均产生了较大的速度变化,尤其是第十一辆车,速度接近零,导致减速引导通过策略失效。
[0157]
在驾驶员不充分执行速度引导策略的情况下,一次加速引导通过策略及一次减速引导通过策略失效,第四辆车、第十一辆车无法实现不停车顺利通过信号交叉口的目的,还可能造成额外的油耗及排放,因此有必要对车辆进行二次引导。
[0158]
从图11至图13中可以看出,在驾驶员不充分执行速度引导策略的情况下,第四辆车在进入二次引导区间时采取二次加速引导通过策略,不停车顺利通过信号交叉口;第十一辆车在进入二次引导区间时采取二次减速引导通过策略,不停车顺利通过信号交叉口。虽然二次引导在一定程度上使得部分车辆多次改变自身速度,但整体上车队速度变化、加速度变化幅度较小,车队仍然以一个较为平滑的轨迹通过信号交叉口,保证了速度引导策略实施的有效性,且能够在一定程度上提高车辆通行效率,减少燃油消耗及排放。
[0159]
表1给出了采用无速度引导,γ=1、对车辆进行一次引导,γ=0.8、对车辆进行一次引导,γ=0.8、对车辆进行二次引导下情况下车辆通过信号交叉口的平均行程时间、油耗及排放数据:
[0160]
类型行程时间/sco/mgfuel/mlhc/mgnox/mg无速度引导41.68182.274526.931325.168922.3533γ=135.7467165.021523.702321.902219.7934γ=0.8,一次引导41.0067181.048426.655424.922922.1593γ=0.8,二次引导35.7867166.287223.782922.033819.9555
[0161]
表2给出了第11至13辆车通过信号交叉口的平均行程时间、油耗及排放数据:
[0162]
类型行程时间/sco/mgfuel/mlhc/mgnox/mg无速度引导35.3667168.141023.957822.240020.5730γ=131.9667149.168621.427819.762717.5684γ=0.8,一次引导34.9165.315723.656221.754120.2493γ=0.8,二次引导32.1667151.460921.672919.997217.7962
[0163]
从表1、表2中可以看出,如果驾驶员能够完全接受速度引导,仅实施一次引导策略即可达到最好的引导效果,有效提高车辆通行效率,减少燃油消耗及排放,但有悖于实际道路交通。当驾驶员不充分执行速度引导策略时,一次引导加速通过策略、一次引导减速通过策略失效,虽然通过平滑车辆运行轨迹、减少个别车辆停车再启动过程达到了一定的提高通行效率、节能减排的效果,但这种效果相较于基数而言很小。而二次引导策略能够有效减少驾驶员接受程度造成的影响,仍然能够达到很好的提高车辆通行效率、减少燃油消耗及排放的效果。从图14中可以看出,速度引导下前四辆车加速并以较大速度行驶时,燃油消耗略高于无速度引导的情况,在其余时间燃油消耗低于无速度引导的情况,一方面在于引导区间范围内的车辆数少,另一方面在于车辆运行轨迹平滑且停车再启动过程的影响少。图16中有关第十一辆车至第十三辆车的燃油消耗情况能够充分说明速度引导策略减少了停车再启动过程的影响。
[0164]
从图15中可以看出,一次引导下35s左右产生了一段燃油消耗极值,原因在于第四辆车无法顺利通过信号交叉口而急剧减速停车,从而导致在第一个绿灯时间内燃油消耗均高于二次引导的情况。在第二个信号周期中二次引导下车队的燃油消耗低于一次引导,一方面在于减速停车车辆距离信号交叉口较近,能够提前启动,另一方面在于停车第十一辆车至第十三辆车速度变化小,且能够快速通过信号交叉口。图17中有关第十一辆车至第十三辆车的燃油消耗情况能够充分证明二次引导在燃油消耗方面的优异性。
[0165]
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
