技术特征:
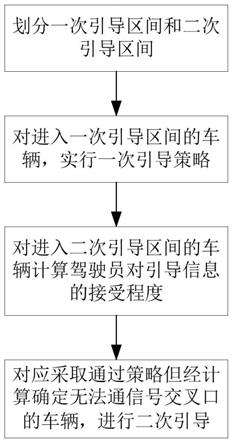
1.一种考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于包括,s1、将信号交叉口的引导区间划分为一次引导区间和二次引导区间,一次引导区间包括二次引导区间,并且一次引导区间和二次引导区间的起点相距设定距离,终点均为信号交叉口;s2、对进入一次引导区间的车辆,根据车辆满足的约束条件在信号通行时段内分别实行一次加速引导通过、一次减速引导通过和一次减速引导停车策略;s3、对执行一次加速引导通过和一次减速引导通过策略的车辆,在进入二次引导区间时,采用车联网系统根据车辆的时空位置计算驾驶员在当前引导过程中对引导信息的接受程度;s4、根据当前车辆速度、红灯时段剩余时间或绿灯时段剩余时间,判断执行一次加速引导通过和一次减速引导通过策略的车辆,能否在此次信号通行时段内通过信号交叉口;若否,则再根据车辆满足的当前约束条件,基于驾驶员对引导信息的接受程度对车辆进行二次引导,使车辆在此次通行时段内通过信号交叉口。2.根据权利要求1所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,一次引导区间长度为300至500米;二次引导区间长度为150至250米。3.根据权利要求1所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,步骤s2中,执行一次加速引导通过策略的车辆的约束条件为:式中l为信号交叉口停车线位置;x
n
(t)为t时刻车辆所在位置;t
g
为绿灯结束时刻;t
safe
为车辆安全车头时距;v
max
为车辆最大速度;η1为引导速度余量;n(t)为前方排队车辆数;h
c
为车辆停车车头间距;t
qd
为车辆进入一次引导区间时前方排队车辆尾车启动所需的时间;当车辆与前方排队车辆尾车距离大于设定阈值时,运动特征描述为:式中v
n
(t)为t时刻当前车辆速度,α为驾驶员的敏感系数,γ为驾驶员对引导信息的接受程度,v(δx
n
(t))为t时刻当前车辆的最优速度;δx
n
(t)为t时刻当前车辆与前方排队车辆尾车的车头间距:δx
n
(t)=x
n 1
(t)-x
n
(t),式中x
n 1
(t)为t时刻前方排队车辆尾车所在位置;当车辆与前方排队车辆尾车距离小于或等于设定阈值时,运动特征描述为:式中λ为速度差的影响因子;δv
n
(t)为t时刻当前车辆与前方排队车辆尾车的速度差:δv
n
(t)=v
n 1
(t)-v
n
(t);式中v
n 1
(t)为t时刻前方排队车辆尾车速度;
当驾驶员对引导信息的接受程度γ小于1时,执行一次加速引导通过策略的车辆未能充分执行一次加速引导通过策略;驾驶员对引导信息的接受程度γ大于1时,执行一次加速引导通过策略的车辆属于过度执行一次加速引导通过策略。4.根据权利要求3所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,步骤s2中,执行一次减速引导通过策略的车辆的约束条件为:式中v
min
为当前车辆最小速度;η2为第一引导裕量,t
r
为红灯结束时刻;对当前车辆按速度引导信息v(
·
)进行引导,后续车辆采取跟驰模式:当运动特征描述为:此时执行一次减速引导通过策略的当前车辆未能充分执行一次减速引导策略;当运动特征描述为:此时执行一次减速引导通过策略的当前车辆属于过度执行一次减速引导策略。5.根据权利要求4所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,步骤s2中,执行一次减速引导停车策略的车辆的约束条件为:对当前车辆按速度引导信息v(
·
)进行引导:v(
·
)=min(v
min
η3,v(l-x
n
(t)-n(t)*h
c
),v(δx
n
(t))),式中η3为第二引导裕量,v(l-x
n
(t)-n(t)*h
c
)为根据当前车辆位置及前方排队车辆信息得到的优化速度;当运动特征描述为:此时执行一次减速引导停车策略的车辆未能充分执行一次减速引导停车策略;当运动特征描述为:此时执行一次减速引导停车策略的车辆属于过度执行一次减速引导停车策略。6.根据权利要求4所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,步骤s4中,对于未能充分执行一次加速引导通过策略和未能充分执行一次减速引导通过策略的车辆,判定能否在此次信号通行时段内通过信号交叉口。7.根据权利要求6所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,对于未能充分执行一次加速引导通过策略的车辆,若不能在此次信号通行时段内
通过信号交叉口,会在信号通行时段的信号灯由绿转红时停车;对于未能充分执行一次减速引导策略的车辆,若不能在此次信号通行时段内通过信号交叉口,会提前到达信号交叉口处停车再启动。8.根据权利要求7所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,对未能充分执行一次加速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,车辆满足的当前约束条件为:9.根据权利要求8所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,对未能充分执行一次加速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,当车辆满足如下约束条件时:v
free
为自由流速度;t
qd2
为车辆进入二次引导区间时前方排队车辆尾车启动所需的时间;对车辆进行二次引导,二次引导速度v(
·
)为:v(
·
)=1.1v
max
;此时运动特征描述为:10.根据权利要求9所述的考虑驾驶员接受程度的信号交叉口车速二次引导方法,其特征在于,对未能充分执行一次减速引导通过策略并且经判断不能在此次信号通行时段内通过信号交叉口的车辆,当车辆满足如下约束条件时:对车辆进行二次引导,二次引导速度v(
·
)为:此时运动特征描述为:
技术总结
考虑驾驶员接受程度的信号交叉口车速二次引导方法,属于智能交通技术领域。本发明针对现有速度引导方法未考虑驾驶员对速度引导接受程度的影响,造成通行效率差及引导效果差的问题。将信号交叉口的引导区间划分为一次引导区间和二次引导区间;对进入一次引导区间的车辆,根据车辆满足的约束条件在信号通行时段内分别实行一次加速引导通过、一次减速引导通过和一次减速引导停车策略;在车辆进入二次引导区间时,采用车联网系统根据车辆的时空位置计算驾驶员在当前引导过程中对引导信息的接受程度;对应采取通过策略而经判断无法通过信号交叉口的车辆进行二次引导。本发明可保证速度引导方法的有效性,提高信号交叉口车辆通行效率、减少油耗及排放。减少油耗及排放。减少油耗及排放。
技术研发人员:史泽宇 刘民壮
受保护的技术使用者:史泽宇
技术研发日:2022.02.28
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。