1.本实用新型涉及酒盒包装生产线机器人技术领域,特别涉及一种酒盒底座生产线圆中压边机器人。
背景技术:
2.酒盒底座圆中是酒盒中用于固定酒瓶的装置,支持酒瓶在酒盒中保持稳定状态,避免酒瓶在运输或储藏时遭到损坏。经过酒包装盒底座的裱纸划胶和裱纸与毛坯进行贴合工序后,酒盒底座圆中的周围有一圈裱纸毛茬,这极大地影响了底座的外观,并且对之后酒瓶的放置也产生了一定的影响,需要将这一圈裱纸毛茬按压到圆中卡纸的背面。传统的压边动作由工人手工完成,生产效率低,生产速度慢,并且工人工作量大,人工成本也较高,这极大地制约了酒包装盒的生产。所以,开发一种底座生产线圆中压边机器人是十分有必要的,具有广阔的生产应用前景。通过对压边工序的动作分解,设计出可以满足压边动作的机器人。
3.酒盒底座生产线圆中压边机器人是一种运动稳定、刚度大、结构紧凑的工业用机器人,能够通过对执行机构的控制,使动平台末端执行器做出画圆动作,再通过压边装置与酒盒底座内圆高度匹配的特殊结构设计,完成对圆中周围毛茬的按压。
4.申请人经过检索,专利202110969992.9公开了一种可自动投料的太阳能组件覆膜压边装置,包括底座、设置在底座上端一侧的投料轨道,所述底座上端另一侧固定有立柱,所述立柱上端固定有顶板,所述底座的上端转动连接有转轴,所述转轴上固定套装有与投料轨道对应并用于对太阳能组件接料的转动座,所述转动座的周壁上沿周向等间距设有四个与太阳能组件适配并对太阳能组件进行定位的接料槽,所述顶板的下端转动连接有第一转筒,所述第一转筒上设有与转轴连接。但该种压边装置主要是针对直线压边动作,无法对底座圆中这类型的曲线进行压边,并且装置结构复杂,操作繁琐。
5.专利201420638406.8公开了一种全自动除泡机的压盒除泡单元,包括有侧面除泡部件、底面除泡部件以及边缘除泡部件:该底面除泡部件安装于侧面除泡部件下部,该边缘除泡部件安装于侧面除泡部件上部。通过侧面除泡部件、底面除泡部件以及边缘除泡部件的作用下,能够同时对纸盒的底面及纸盒中的两侧面及两边缘进行除泡,且除泡效果良好,提高纸盒的除泡效率及产品良品率。但是该种压盒除泡单元主要是用于除泡,并没有实现对圆中毛边的压边动作,且结构复杂,控制繁多,并不适用酒盒底座生产线中。
6.与现有技术相比,本实用新型酒盒底座生产线圆中压边机器人的有益效果:将圆中压边机器人放置于酒盒底座生产线上,代替人工完成按压圆中毛边的工序工作,更加地高效和节能。该圆中压边机器人结构紧凑、运行稳定,操作简单,在酒包装盒生产线或其他包装盒生产线具有广阔的应用前景。
技术实现要素:
7.为解决上述技术问题,本实用新型提供一种用于酒盒底座生产线的圆中压边机器
人,可实现酒盒底座圆中的毛边按压问题,本发明采用如下技术方案:
8.酒盒底座生产线圆中压边机器人,包括:执行机构,主体结构为2rps/upr 并联机构,具有2r1t三个自由度,用于末端执行器做出压边画圆动作和复位动作;压边装置,其下半部圆柱与酒盒底座的圆中空腔高度一致处有一条切槽,切槽的宽度与底座圆中的边缘厚度一致,便于对底座毛边进行按压,上半部分和下半部分之间由滚珠连接,可实现上下部分彼此间转动;伺服皮带线,对传送过来的底座进行定位及运输;活动装夹装置,用于固定和移动酒盒底座,可装夹大小不一的底座;机架,与地面连接,用于压边机器人各部分的固定、遮挡光线防止定位装置的失效和避免人员与机械装置直接接触;
9.执行机构的动平台与压边装置通过法兰和螺栓连接,构成压边机器人的末端执行器;
10.执行机构的静平台固连于机架;
11.定位装置的传感器固连于机架,伺服皮带线固连于机架和地面;
12.活动装夹装置固连于机架,且与伺服皮带面保持一定的距离。
13.执行机构的驱动组件由三个液压缸组成,位置分别在执行机构的旋转连接件和直线驱动杆连接处、另一个旋转连接件和直线驱动杆连接处、u副连接件和直线驱动杆连接处,可使执行机构实现圆中压边的运动。
14.活动装夹装置的驱动组件由4个气缸驱动。
15.伺服皮带线的驱动组件由伺服电机驱动。
附图说明
16.下面结合附图和具体实施方式对本发明作进一步详细说明。
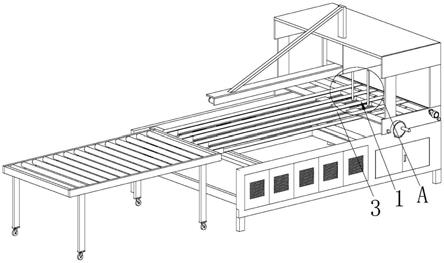
17.图1为酒盒底座圆中压边机器人的立体结构示意图;
18.图2为执行机构结构示意图;
19.图3为压边装置结构示意图;
20.图4为活动装夹装置结构示意图;
21.图5为机架及伺服皮带示意图;
22.其中,附图标记:
23.图中标号:1-执行机构,1-1-执行机构静平台,1-1-1-静平台r副连接件一, 1-1-2-静平台r副连接件二,1-1-3-静平台u副连接件、1-2-1-旋转连接件一,1-2-2
‑ꢀ
旋转连接件二,1-3-1直线驱动杆一,1-3-2-直线驱动杆二,1-4-1-动平台s副连接件一,1-4-2-动平台s副连接件二,1-5-u副连接件,1-3-3-直线驱动杆三,1-6
‑ꢀ
动平台r副连接件,1-7-执行机构动平台,2-压边装置,2-1-压边装置上半部, 2-2-滚珠,2-3-滚珠内圈,2-4-压边装置下半部,3-活动装夹装置,3-1-夹具支架, 3-2-夹具气缸,3-3-装夹杆,4-伺服皮带线,5-机架。
具体实施方式
24.本实用新型的核心是针对酒盒底座生产线上的底座圆中毛边问题,提出一种可实现底座圆中压边动作点的机器人,此种压边机器人由于采用了并联机构,具备很好的稳定性和耐用性,控制简单,生产效率高,可大幅度节省人力物力。
25.参考图1-图5,本发明公布一种酒盒底座生产线上的圆中压边机器人,包括执行机构1、压边装置2,活动装夹装置3,伺服皮带线4,机架5。
26.酒盒圆中的压边动作为活动装夹装置3将伺服皮带线4传送过来的底座固定,执行机构1从初始位置伸入酒盒底座圆中的空腔中,底座圆中的空腔高度与压边装置下半部2-4的压边槽高度相同,底座圆中的边卡入压边槽内,然后执行机构1在保证压边装置2下表面与底座上表面平行的条件下作画圆动作,顺时针、逆时针各转一圈,底座圆中的边退出压边槽,机构复位,完成整个压边动作。
27.执行机构1、活动装夹装置3、伺服皮带线4分别固连在机架5上,压边装置2与执行机构动平台1-7固连,作为执行机构的末端执行器。
28.所述执行机构1组件包括:执行机构静平台1-1、静平台r副连接件一1-1-1、静平台r副连接件二1-1-2、静平台u副连接件1-1-3、旋转连接件一1-2-1、旋转连接件二1-2-2、直线驱动杆一1-3-1、直线驱动杆二1-3-2、动平台s副连接件一1-4-1、动平台s副连接件二1-4-2、u副连接件1-5、直线驱动杆三1-3-3、动平台r副连接件1-6、执行机构动平台1-7。其中,执行机构1为2rps/upr 并联机构,具有2r1t三个自由度,满足压边装置2下表面平行于酒盒底座上表面作画圆压边的工艺动作。因为有三个自由度,所以执行机构有三个驱动,分别位于旋转连接件一1-2-1和直线驱动杆一1-3-1连接处、旋转连接件二1-2-2和直线驱动杆二1-3-2连接处、u副连接件1-5和直线驱动杆三1-3-3连接处。
29.所示压边装置2组件包括:压边装置上半部2-1、滚珠2-2、滚珠内圈2-3、压边装置下半部2-4。压边装置下半部2-4的压边槽高度d与酒盒底座圆中的内腔高度相同,压边装置上半部2-1与压边装置下半部2-4之间通过滚珠2-2连接,可以实现相互转动,滚珠2-2被滚珠内圈2-3限制位置,避免滚珠的移位错位导致压边装置无法正常工作。
30.所示活动装夹装置3组件包括:夹具支架3-1、夹具气缸3-2、装夹杆3-3。活动装夹装置3的夹具支架3-1安装在伺服皮带线4的机架上,夹具气缸3-2与夹具支架3-1固连,装夹杆3-3的末端为与底座边角相匹配的三角钢,为避免钢与底座直接接触,损坏底座外观,可在三角钢外覆一层软布缓冲,夹具气缸3-2 和装夹杆3-3各有4个,分别安装在底座四周的对应位置,便于夹装底座。相应地,活动装夹装置3共有4个直线驱动,分别位于各方位的夹具气缸3-2和装夹杆3-3的连接处。
31.伺服皮带线4与机架5固连,由伺服电机驱动。
32.以上所述仅为本实用新型的较佳实例,并不限制本发明,故本发明在不脱离精神和范围的前提下发生的各种变化和改进,例如使用一般方法调节夹具活动范围,使用一般方法调节压边装置的大小等,均应在要求保护的本实用新型的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。