1.本发明涉及切割领域,尤其是涉及一种龙门式带锯床。
背景技术:
2.随着我国加工制造行业的不断发展,加工设备的需求也越来越大,尤其是切割设备的需求,在加工制造过程中,通常需要对一些钢管进行切割,切割设备的需求量日益增大。
3.公告号为cn202411545u的中国专利公开了一种大型龙门卧式带锯床,包括底座和设置在底座上的锯架、主减速控制装置、传动系统和移动工作台,所述底座上还设有龙门架,所述锯架设置在龙门架上,所述龙门架上设有配合锯架的主导轨和副导轨,所述传动系统和主减速控制装置设置在锯架上,所述传动系统上设有锯条液压张紧装置。
4.上述大型龙门卧式带锯床虽然能够切割钢管,但是在切割过程中,需要人工给料,耗费较大人力。
技术实现要素:
5.为了节省人力,本技术提供一种龙门式带锯床。
6.本技术提供的一种龙门式带锯床采用如下的技术方案:
7.一种龙门式带锯床,包括带锯床本体,还包括连接带锯床本体的上料架,上料架上设有给料装置,给料装置包括第一电机、丝杠、第一螺母块、给料臂和同步块,第一电机设置在上料架上,丝杠转动连接在上料架的一侧,第一电机与丝杠联动,第一螺母块螺纹连接在丝杠上,第一螺母块与上料架滑动配合,同步块滑动连接在上料架远离丝杠的一侧,给料臂的一端与第一螺母块铰接,另一端与同步块可拆卸连接,给料臂位于上料架上方。
8.通过采用上述技术方案,在切割钢管时,将钢管放置到上料架上之后,转动给料臂,使给料臂远离第一螺母块的一端连接在同步块上,启动第一电机,第一电机在工作状态下带动第一螺母块朝向靠近带锯床本体方向移动,第一螺母块带动给料臂和同步块同时移动,给料臂在移动过程中始终抵触钢管,给钢管施加推力,从而使钢管朝向靠近带锯床本体方向移动,代替了人工给料,实现自动给料的目的,节省人力。
9.可选的,所述同步块上设有凹槽,给料臂远离第一螺母块的一端插设在凹槽内,同步块上设有定位件,定位件包括定位杆、连接杆、手柄和弹簧,同步块上设有二级阶梯孔,二级阶梯孔内径较小的一端与同步块侧壁连通,二级阶梯孔内径较大的一端连通至凹槽,连接杆贯穿二级阶梯孔内径较小部分,连接杆伸入至二级阶梯孔内径较大部分的一端连接定位杆,定位杆与二级阶梯孔滑动配合,连接杆位于同步块外部的一端连接手柄,弹簧套设在连接杆上,弹簧位于同步块外部,弹簧的一端连接手柄,另一端连接同步块,给料臂上设有插设孔,弹簧处于自然状态时,定位杆插设在插设孔内。
10.通过采用上述技术方案,将给料臂插设在凹槽内,能够对给料臂远离第一螺母块的一端进行限位,避免给料臂与同步块分离;将给料臂插入到凹槽内之前,拉动手柄,弹簧
被拉伸,连接杆和定位杆朝向远离凹槽方向移动,定位杆移动至二级阶梯孔内,以便将给料臂顺利的放入到凹槽内,将给料臂放入到凹槽内后,解除对手柄的拉力,弹簧由拉伸状态变为自然状态,在此过程中,定位杆、连接杆和手柄朝向靠近给料臂方向移动,定位杆插入到插设孔内,从而对给料臂定位,既提高了给料臂在凹槽内的稳定性,又实现了连接给料臂和同步块的目的。
11.可选的,所述凹槽侧壁嵌设有磁铁块,给料臂为铁材质,给料臂被磁铁块吸附。
12.通过采用上述技术方案,将给料臂插入到凹槽内后,给料臂被磁铁块吸附,从而进一步提高给料臂与同步块之间的稳定性。
13.可选的,所述带锯床本体的工作台上设有安装槽和夹持装置,夹持装置包括第二电机、夹持杆、第二螺母块、第三螺母块和夹持板,第二电机设置在安装槽内,夹持杆转动连接在安装槽内,夹持杆上设有两段方向相反的螺纹,第二螺母块螺纹连接在一段螺纹上,第三螺母块螺纹连接在另一段螺纹上,第二螺母块和第三螺母块均与带锯床本体的工作台滑动配合,夹持板设置在第二螺母块和第三螺母块上,且夹持板从安装槽内凸出。
14.通过采用上述技术方案,在切割钢管时,启动第二电机,第二电机驱动第二螺母块和第三螺母块朝向相互靠近方向移动,第二螺母块和第三螺母块将钢管夹持,从而实现对钢管进行夹持、限位的目的,提高钢管在切割过程中的稳定性。
15.可选的,所述上料架包括架体和传动辊,架体连接在带锯床本体的工作台上,传动辊转动连接在架体上,传动辊间隔设置,架体上设有若干组限位装置,限位装置沿架体的长度方向设置,限位装置包括第一气缸、升降板、第二气缸、移动板和限位块,第一气缸竖直设置在架体上,第一气缸的活塞杆连接升降板,升降板上连接两个水平设置的第二气缸,且两个第二气缸的活塞杆相对设置,第二气缸的活塞杆连接移动板,限位块连接在移动板上,限位块的宽度小于相邻传动辊之间的空隙。
16.通过采用上述技术方案,在给料工作进行前,启动第一气缸,第一气缸驱动升降板移动,使限位块穿过相邻传动辊之间的空隙,限位块位于钢管的两侧,再启动第二气缸,第二气缸驱动移动板和限位块移动,从而使限位块接触钢管,在钢管移动过程中,给料臂推动钢管前进,当给料臂靠近限位装置时,关闭第一电机,给料臂不再继续移动,先启动第二气缸,再启动第一气缸,靠近给料臂的限位块先朝向远离钢管方向移动,再移动至传动辊下方,再启动第一电机,给料臂继续移动,当给料臂再靠近其他限位装置时,再关闭第一电机,再先启动第二气缸,然后启动第一气缸,靠近给料臂的限位块继续朝向远离钢管方向移动,再移动至传动辊下方,给料臂再继续移动,以此类推,完成给料过程。限位装置能够对钢管的移动方向进行导向,减小钢管的移动方向发生变化的可能性。
17.可选的,所述限位块通过旋转气缸连接在移动板上,限位块的一个竖直侧壁上设有弧形槽。
18.通过采用上述技术方案,若需要推动的钢管为方形,在对钢管限位时,启动旋转气缸,使限位块的竖直平面朝向钢管,然后接触钢管,若需要推动的钢管为圆柱形,则通过旋转气缸调节限位块,使限位块带有弧形槽的一侧朝向钢管,并通过弧形槽接触钢管,以便提供较好的限位效果。
19.可选的,所述弧形槽内设有若干个同心的弧形块,抵触弧形槽侧壁的弧形块与限位块之间可拆卸连接,相邻弧形块之间可拆卸连接。
20.通过采用上述技术方案,若钢管为圆柱形,工作人员可以根据钢管尺寸选择选择适当的弧形块,将相应的弧形块安装在限位块上,以便能够更好的对钢管进行限位,提高限位效果。
21.可选的,所述上料架与带锯床本体之间可拆卸连接
22.通过采用上述技术方案,在运输时,可以将上料架与带锯床本体拆分开运输,避免上料架和带锯床本体连接在一起运输,占用空间。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1、在切割钢管时,将钢管放置到上料架上之后,转动给料臂,使给料臂远离第一螺母块的一端连接在同步块上,启动第一电机,第一电机在工作状态下带动第一螺母块朝向靠近带锯床本体方向移动,第一螺母块带动给料臂和同步块同时移动,给料臂在移动过程中始终抵触钢管,给钢管施加推力,从而使钢管朝向靠近带锯床本体方向移动,代替了人工给料,实现自动给料的目的,节省人力。
25.2、将给料臂插设在凹槽内,能够对给料臂远离第一螺母块的一端进行限位,避免给料臂与同步块分离;将给料臂插入到凹槽内之前,拉动手柄,弹簧被拉伸,连接杆和定位杆朝向远离凹槽方向移动,定位杆移动至二级阶梯孔内,以便将给料臂顺利的放入到凹槽内,将给料臂放入到凹槽内后,解除对手柄的拉力,弹簧由拉伸状态变为自然状态,在此过程中,定位杆、连接杆和手柄朝向靠近给料臂方向移动,定位杆插入到插设孔内,从而对给料臂定位,既提高了给料臂在凹槽内的稳定性,又实现了连接给料臂和同步块的目的。
26.3、将给料臂插入到凹槽内后,给料臂被磁铁块吸附,从而进一步提高给料臂与同步块之间的稳定性。
附图说明
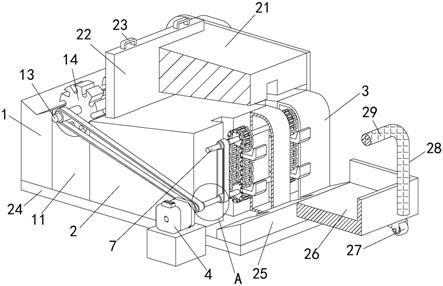
27.图1是本实施例中用于体现龙门式带锯床的结构示意图。
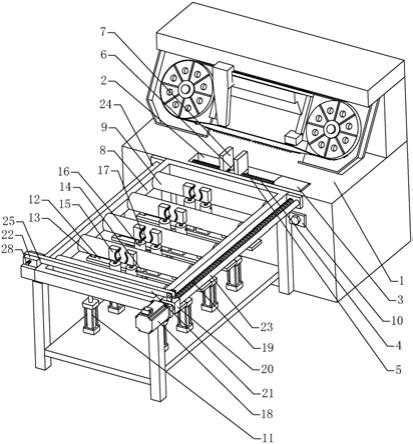
28.图2是本实施例中用于体现限位装置的结构示意图。
29.图3是本实施例中用于体现弧形块与限位块之间位置关系的结构示意图。
30.图4是本实施例中用于体现给料臂与同步块之间连接关系的结构示意图。
31.附图标记说明:
32.1、带锯床本体;2、安装槽;3、第二电机;4、夹持杆;5、第二螺母块;6、第三螺母块;7、夹持板;8、架体;9、传动辊;10、固定片;11、第一气缸;12、升降板;13、第二气缸;14、移动板;15、限位块;16、旋转气缸;17、弧形块;18、第一电机;19、丝杠;20、第一螺母块;21、给料臂;22、同步块;23、第一导向杆;24、第二导向杆;25、凹槽;26、定位杆;27、连接杆;28、手柄;29、弹簧;30、二级阶梯孔;31、插设孔;32、磁铁块。
具体实施方式
33.本技术实施例公开一种龙门式带锯床。参照图1,龙门式带锯床包括带锯床本体1和上料架。
34.参照图1,带锯床本体1的工作台上设有安装槽2和夹持装置,夹持装置包括第二电机3、夹持杆4、第二螺母块5、第三螺母块6和夹持板7,第二电机3设置在安装槽2内,夹持杆4转动连接在安装槽2内,夹持杆4上设有两段方向相反的螺纹,第二螺母块5螺纹连接在一段
螺纹上,第三螺母块6螺纹连接在另一段螺纹上,第二螺母块5和第三螺母块6均与带锯床本体1的工作台滑动配合,具体的,第二螺母块5和第三螺母块6位于安装槽2内并与安装槽2滑动配合,夹持板7设置在第二螺母块5和第三螺母块6上,且夹持板7从安装槽2内凸出。
35.第二电机3在工作状态下带动夹持杆4转动,夹持杆4在转动过程中带动第二螺母块5和第三螺母块6朝向相反方向移动;当切割钢管时,操控第二电机3,使第二螺母块5和第三螺母块6朝向相互靠近方向移动,第二螺母块5上的夹持板7和第三螺母块6上的夹持板7将钢管夹持,对钢管进行限位,以便提高钢管在切割过程中的稳定性;在钢管切割结束后,操控第二电机3,使第二螺母块5和第三螺母块6朝向相互远离方向移动,夹持板7不再夹紧钢管,解除对钢管的限位。
36.参照图1,上料架与带锯床本体1的工作台之间可拆卸连接,具体的,上料架包括架体8和传动辊9,架体8的一端连接有固定片10,固定片10通过螺钉可拆卸连接在带锯床本体1的工作台上,传动辊9转动连接在架体8上,且相邻传动辊9之间间隔设置。
37.参照图1、图2和图3,架体8上设有若干组限位装置,本实施例中,限位装置设置为四组,限位装置沿架体8的长度方向设置,限位装置包括第一气缸11、升降板12、第二气缸13、移动板14和限位块15,第一气缸11竖直设置在架体8上并位于传动辊9下方,第一气缸11的活塞杆连接升降板12,升降板12上连接两个水平设置的第二气缸13,且两个第二气缸13的活塞杆相对设置,第二气缸13的活塞杆连接移动板14,限位块15通过旋转气缸16连接在移动板14上,旋转气缸16连接在移动板14上,限位块15连接旋转气缸16的转动杆,限位块15的宽度小于相邻传动辊9之间的空隙,以便限位块15能够自由穿过相邻两个传动辊9之间,限位块15的一个竖直侧壁上设有弧形槽,弧形槽内连接有三个同心的弧形块17,抵触弧形槽侧壁的弧形块17与限位块15之间通过沉头螺钉可拆卸连接,相邻弧形块17之间通过沉头螺钉可拆卸连接。
38.将钢管放入到传动辊9上后,根据钢管的形状,调整限位块15的位置,若钢管为方形钢管,启动旋转气缸16,使限位块15的竖直平面朝向钢管,若钢管为圆柱形钢管,启动旋转气缸16,使限位块15上带有弧形块17的一侧朝向钢管,且可以根据圆柱形钢管尺寸的大小,在限位块15上安装相应大小的弧形块17,以便弧形块17在后续操作过程中能够顺利的贴合于钢管侧壁。
39.调整好限位块15之后,启动第一气缸11,第一气缸11带动升降板12、第二气缸13、旋转气缸16和限位块15向上移动,限位块15穿过相邻传动辊9之间的空隙,然后启动第二气缸13,第二气缸13带动移动板14、旋转气缸16和限位块15水平移动,使限位块15或者限位块15上的弧形块17能够接触钢管,从而对钢管进行限位,若钢管被朝向带锯床本体1方向推动,则在钢管移动过程中,能够对钢管的移动方向进行导向。
40.参照图1,架体8上连接有给料装置,给料装置包括第一电机18、丝杠19、第一螺母块20、给料臂21和同步块22。
41.参照图1,第一电机18设置在架体8上,丝杠19转动连接在架体8的一侧,第一电机18的电机轴与丝杠19连接,第一螺母块20螺纹连接在丝杠19上,第一螺母块20与架体8滑动配合,架体8上连接有第一导向杆23,第一导向杆23贯穿第一螺母块20,第一螺母块20可沿着第一导向杆23滑动,同步块22滑动连接在架体8远离丝杠19的一侧,架体8上连接有第二导向杆24,同步块22滑动套设在第二导向杆24上,给料臂21的一端与第一螺母块20铰接,另
一端与同步块22可拆卸连接,给料臂21位于传动辊9上方。
42.在需要对带锯床本体1给料时,将钢管放置在传动辊9上,转动给料臂21,使给料臂21远离第一螺母块20的一端连接在同步块22上,启动第一电机18,第一电机18带动丝杠19转动,丝杠19在转动过程中带动第一螺母块20移动,第一螺母块20带动给料臂21和同步块22移动,给料臂21在移动过程中抵触钢管,对钢管施力,将钢管推向带锯床本体1,实现给料的目的。
43.参照图1和图4,同步块22上设有凹槽25,给料臂21远离第一螺母块20的一端插设在凹槽25内,同步块22上连接有定位件,定位件包括定位杆26、连接杆27、手柄28和弹簧29,同步块22上设有二级阶梯孔30,二级阶梯孔30内径较小的一端与同步块22侧壁连通,二级阶梯孔30内径较大的一端连通至凹槽25,连接杆27贯穿二级阶梯孔30内径较小部分,连接杆27伸入至二级阶梯孔30内径较大部分的一端连接定位杆26,定位杆26与二级阶梯孔30滑动配合,连接杆27位于同步块22外部的一端连接手柄28,弹簧29套设在连接杆27上,弹簧29位于同步块22外部,弹簧29的一端连接手柄28,另一端连接同步块22,给料臂21上设有插设孔31,当给料臂21插设到凹槽25内并抵触凹槽25底部时,插设孔31与二级阶梯孔30对应,弹簧29处于自然状态时,定位杆26插设在插设孔31内。
44.参照图4,凹槽25上与二级阶梯孔30相对的侧壁上嵌设有磁铁块32,给料臂21为铁材质,给料臂21被磁铁块32吸附。
45.在连接给料臂21和同步块22时,将给料臂21插入到凹槽25内之前,拉动手柄28,弹簧29被拉伸,连接杆27和定位杆26朝向远离凹槽25方向移动,定位杆26移动至二级阶梯孔30内,然后将给料臂21放入到凹槽25内后,给料臂21抵触凹槽25底部,且给料臂21被磁铁块32吸附,再解除对手柄28的拉力,弹簧29由拉伸状态变为自然状态,定位杆26、连接杆27和手柄28朝向靠近给料臂21方向移动,定位杆26插入到插设孔31内,定位杆26与磁铁块32配合,完成给料臂21与同步块22的连接。
46.在拆分给料臂21与同步块22时,朝向远离给料臂21方向拉动手柄28,定位杆26随着手柄28发生移动,定位杆26从插设孔31内脱离并进入到二级阶梯孔30内,解除对给料臂21的限位,再转动给料臂21,给料臂21与磁铁块32分离,从而将给料臂21从凹槽25内移出,完成给料臂21与同步块22之间的拆分。
47.本技术实施例一种龙门式带锯床的实施原理为:在切割钢管时,将钢管放置到上料架上之后,根据钢管的形状,调整限位块15,然后操控限位装置,使限位块15或者限位块15上的弧形块17接触钢管两侧,再将给料臂21连接在同步块22上,启动第一电机18,给料臂21推动钢管朝向带锯床本体1方向移动,在给料臂21移动过程中,当给料臂21靠近限位装置时,关闭第一电机18,给料臂21不再继续移动,先启动第二气缸13,再启动第一气缸11,靠近给料臂21的限位块15先朝向远离钢管方向移动,然后再移动至传动辊9下方,靠近给料臂21的限位装置不再阻挡给料臂21运动,再启动第一电机18,给料臂21继续移动,当给料臂21再靠近其他的限位装置时,再关闭第一电机18,再依次启动第二气缸13、第一气缸11,靠近给料臂21的限位块15先朝向远离钢管方向移动,然后再移动至传动辊9下方,给料臂21再继续移动,以此类推,完成给料过程。给料过程中,给料装置代替了人工给料,实现自动给料的目的,节省人力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。