z轴碰撞检测机构
技术领域
1.本实用新型涉及机器人抓手技术领域,尤其是涉及一种z轴碰撞检测机构。
背景技术:
2.随着技术的发展,越来越多的机械行业开始使用机器人替代人的工作,在机器人的末端都会安装不同种类的机器人抓手,机器人抓手通常由执行机构、夹指、连杆机构、气动元件、检测开关等等组成。在自动线生产中,需要搬运大量的工件,由于搬运工件的过程中需要机械抓手不断的移动,在移动后再次夹取工件时,若机械抓手在下降过程中受到阻碍无法继续移动时,往往是通过电机持续运转过载后再停止移动,造成机器抓手的电机经常需要维修,导致成本增加。
技术实现要素:
3.本实用新型要解决的技术问题是:为了克服现有技术中械抓手在下降过程中受到阻碍无法继续移动时,往往是通过电机持续运转过载后再停止移动,造成机器抓手的电机经常需要维修,导致成本增加的问题,提供一种z轴碰撞检测机构。
4.本实用新型解决其技术问题所采用的技术方案是:一种z轴碰撞检测机构,包括安装架、检测组件以及抓手组件,所述检测组件包括连接板以及若干检测件,所述连接板和安装架滑动连接,所述连接板和抓手组件固定连接,所述连接板上凸出有检测部,所述检测件和安装架固定连接,所述检测件用于检测检测部位置,通过将安装架和抓手组件设计为滑动连接,使得抓手组件在受到阻碍后能够移动,为运行提供移动缓冲距离,且通过检测部和检测件的配合,检测到抓手组件受到阻碍后,使电机能够及时停止,避免过载损伤。
5.为了解决如何实现连接板和安装架之间滑动连接的问题,进一步包括该碰撞检测机构包括滑动组件,所述滑动组件包括第一滑轨以及若干与第一滑轨相匹配的第一滑块,所述第一滑轨和安装架固定连接,所述第一滑块和连接板固定连接,所述第一滑块和第一滑轨滑动连接。
6.为了解决连接板脱离安装架的问题,进一步包括该碰撞检测机构包括限位组件,所述限位组件包括限位轴以及与限位轴相匹配的限位槽,所述限位轴和安装架固定连接,所述限位槽开设在连接板上;
7.常规状态下,所述限位轴位于限位槽内,能够为连接板提供一个支撑点,避免第一滑块承受力度大导致松动。
8.为了解决单一检测件不精准的问题,进一步包括所述检测件包括沿竖向间隔分布的第一传感器和第二传感器,所述第一传感器位于第二传感器上方,所述第一传感器和第二传感器均和安装架固定连接,所述第一传感器和安装架之间以及第二传感器和安装架之间留有供检测部移动的间隙,提供多个信号检测点,提高反馈精准度。
9.为了解决如何实现工件抓取的问题,进一步包括所述抓手组件包括摆缸、安装板、第二滑轨、若干第二滑块以及若干气爪,所述第二滑块和气爪一一对应,所述摆缸和连接板
固定连接,所述摆缸的输出端和安装板顶面固定连接,所述第二滑轨和安装板底面固定连接,所述第二滑块和第二滑轨滑动连接,所述气爪和其所对应的第二滑块固定连接,结构简单快捷,且气爪之间间距可调节,抓取角度可调节,提高抓取效率。
10.本实用新型的有益效果是:本实用新型提供的一种z轴碰撞检测机构,通过将安装架和抓手组件设计为滑动连接,使得抓手组件在受到阻碍后能够移动,为运行提供移动缓冲距离,且通过检测部和检测件的配合,检测到抓手组件受到阻碍后,使电机能够及时停止,避免过载损伤。
附图说明
11.下面结合附图和实施例对本实用新型进一步说明。
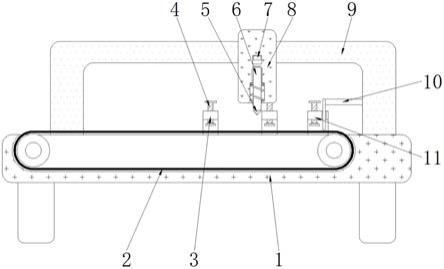
12.图1是本实用新型常规状态下的结构示意图;
13.图2是本实用新型检测到阻碍信号的结构示意图;
14.图3是本实用新型检测到阻碍信号正视的结构示意图;
15.图4是本实用新型图3中c-c处的剖视结构示意图;
16.图5是本实用新型图1中a处的放大结构示意图;
17.图6是本实用新型图2中b处的放大结构示意图;
18.图7是本实用新型图4中d处的放大结构示意图。
19.图中:1、安装架,2、检测组件,21、连接板,211、检测部,22、检测件, 221、第一传感器,222、第二传感器,3、抓手组件,31、摆缸,32、安装板, 33、第二滑轨,34、第二滑块,35、气爪,4、滑动组件,41、第一滑轨,42、第一滑块,5、限位组件,51、限位轴,52、限位槽。
具体实施方式
20.现在结合附图对本实用新型做进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
21.如图1是本实用新型的结构示意图,一种z轴碰撞检测机构,包括安装架1、检测组件2以及抓手组件3,所述检测组件2包括连接板21以及若干检测件22,所述连接板21和安装架1滑动连接,所述连接板21和抓手组件3固定连接,所述连接板21上凸出有检测部211,所述检测件22和安装架1固定连接,所述检测件22用于检测检测部211位置,通过将安装架1和抓手组件3设计为滑动连接,使得抓手组件3在受到阻碍后能够移动,为运行提供移动缓冲距离,且通过检测部211和检测件22的配合,检测到抓手组件3受到阻碍后,使电机能够及时停止,避免过载损伤。
22.如图3、图4、图7所示,该碰撞检测机构包括滑动组件4,所述滑动组件 4包括第一滑轨41以及若干与第一滑轨41相匹配的第一滑块42,所述第一滑轨41和安装架1固定连接,所述第一滑块42和连接板21固定连接,所述第一滑块42和第一滑轨41滑动连接。
23.如图1、图5所示,该碰撞检测机构包括限位组件5,所述限位组件5包括限位轴51以及与限位轴51相匹配的限位槽52,所述限位轴51和安装架1固定连接,所述限位槽52开设在连接板21上;
24.常规状态下,所述限位轴51位于限位槽52内,能够为连接板21提供一个支撑点,避免第一滑块42承受力度大导致松动。
25.如图2、图5所示,所述检测件22包括沿竖向间隔分布的第一传感器221 和第二传感器222,所述第一传感器221位于第二传感器222上方,所述第一传感器221和第二传感器222均和安装架1固定连接,所述第一传感器221和安装架1之间以及第二传感器222和安装架1之间留有供检测部211移动的间隙,提供多个信号检测点,提高反馈精准度。
26.如图5、图6、图7所示,所述抓手组件3包括摆缸31、安装板32、第二滑轨33、若干第二滑块34以及若干气爪35,所述第二滑块34和气爪35一一对应,所述摆缸31和连接板21固定连接,所述摆缸31的输出端和安装板32 顶面固定连接,所述第二滑轨33和安装板32底面固定连接,所述第二滑块34 和第二滑轨33滑动连接,所述气爪35和其所对应的第二滑块34固定连接,结构简单快捷,且气爪35之间间距可调节,抓取角度可调节,提高抓取效率。
27.当检测件22为一个传感器时,其检测检测部211初始位置,检测部211移动后无法检测到后使电机停止,或者其检测检测部211受阻碍后所到达某一位置后检测到检测部211使电机停止,检测精度高但遇到抓手触碰工件或者振动时,其错误停止电机工作。
28.实施例1:
29.本技术中所述检测件22包括沿竖向间隔分布的第一传感器221和第二传感器222,第一传感器221位于安装架1左侧,第二传感器222位于安装架1右侧,检测部211设有两个位于安装架1两侧,常规状态下,所述限位轴51位于限位槽52内,电机驱使安装架1下降,在下降过程中,若抓手组件3受阻后,连接板21带动抓手组件3移动,在上升过程中,位于右侧的检测部211上升移出第二传感器222检测区,当位于左侧的检测部211上升进入第一传感器221检测区,使电机停止,避免电机过载。
30.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。