1.本实用新型的实施例涉及一种机器人工作站,特别涉及一种机器人自动打磨自动拧螺栓站。
背景技术:
2.减速机壳,机械加工后,由于材质比较硬,都会在边角产生毛刺,以前现场都是人工来磨去,装螺栓也是人来手动拧紧,效率十分的低下。
技术实现要素:
3.本实用新型的实施方式的目的在于提供一种能够实现打磨和拧紧螺栓一体的机器人自动打磨自动拧螺栓站,以此来解决现有的减速机壳都需要人工去除毛刺和手动拧紧螺栓,以此来提高工作效率,并且实现自动化。
4.为了实现上述目的,本实用新型的实施方式设计了一种机器人自动打磨自动拧螺栓站,其特征在于,包括:
5.转台,在所述的机器人自动打磨自动拧螺栓站的一侧设置所述的转台;
6.打磨机器人;在所述的转台的一侧设置所述的打磨机器人;
7.拧紧机器人;在所述的转台的一侧,在所述的打磨机器人并行的位置上设置所述的拧紧机器人;
8.所述的打磨机器人和所述的拧紧机器人覆盖所述的转台的工作位区域。
9.进一步,所述的转台呈圆形结构,所述的转台的纵向轴线和横向轴线上被分割成4块;在所述的转台的纵向轴线和横向轴线上分别设置隔离板。
10.进一步,在所述的转台的下部设置转台旋转机构,所述的转台沿预设的旋转方向进行旋转。
11.进一步,所述的转台,还包括:
12.打磨上件工装,在所述的转台上的一侧上固定所述的打磨上件工装;所述的打磨上件工装上固定需要打磨工件;
13.拧紧上件工装,在所述的转台上的一侧,在所述的打磨上件工装的一侧,固定所述的拧紧上件工装,在所述的拧紧上件工装固定需要拧紧的工件。
14.进一步,在所述的转台的另一侧,在所述的打磨上件工装的对面,在所述的转台的外侧固定打磨机器人,所述的打磨机器人对所述的打磨上件工装上的工件进行打磨。
15.进一步,在所述的转台的另一侧,在所述的拧紧上件工装的对面,在所述的转台的外侧固定拧紧机器人,所述的拧紧机器人对所述的拧紧上件工装上的工件进行拧紧。
16.进一步,在所述的打磨机器人的第六轴上固定打磨工具,所述的打磨工具为电动打磨机。
17.进一步,所述的拧紧机器人的第六轴上固定拧紧工具,所述的拧紧工具为拧紧电动轴。
18.进一步,在所述的打磨机器人和打磨上件工装的上方,在转台上固定打磨房,所述的打磨房一直延伸至所述的打磨机器人的后侧。
19.进一步,在所述的机器人自动打磨自动拧螺栓站的四周设置防护栏,在拧紧机器人一侧,在所述的防护栏上设置螺栓自动送料机。
20.本实用新型的实施方式同现有技术相比,利用了转台、打磨机器人和拧紧机器人对减速机壳进行去除毛刺和拧紧螺栓,打磨机器人和拧紧机器人就能够通过转台的旋转来切换工位,实现对于减速机壳进行去除毛刺和拧紧螺栓,解决了现有的减速机壳都需要人工去除毛刺和手动拧紧螺栓的技术问题。
附图说明
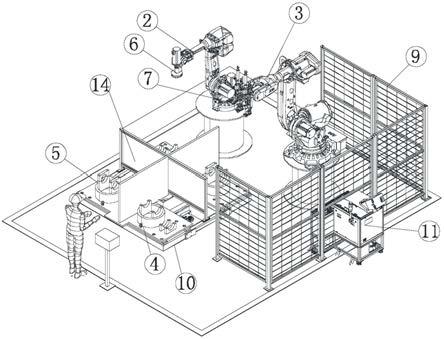
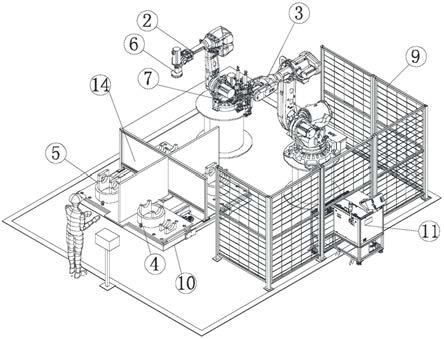
21.图1为本实用新型的立体结构示意图;
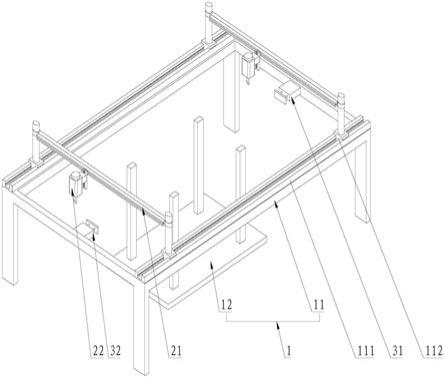
22.图2为图1的主视示意图;
23.图3为图1的俯视示意图;
24.图4为图1的左视示意图;
25.图5为本实用新型的去除打磨房后的立体示意图。
具体实施方式
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本申请各权利要求所要求保护的技术方案。
27.本实用新型的实施方式涉及一种机器人自动打磨自动拧螺栓站,如图1、图2、图3、图4所示,包括:
28.转台10,在机器人自动打磨自动拧螺栓站的一侧设置转台10;转台10用于在转台10的一侧设置打磨机器人2,打磨机器人2用于对于工件进打磨;
29.在转台10的一侧,在打磨机器人2并行的位置上设置拧紧机器人3,拧紧机器人3对工件进行拧紧;
30.打磨机器人2和拧紧机器人3覆盖转台10的工作位区域;这样,打磨机器人2和拧紧机器人3就能够通过转台10的旋转来切换工位,实现对于减速机壳进行去除毛刺和拧紧螺栓,解决了现有的减速机壳都需要人工去除毛刺和手动拧紧螺栓的技术问题。
31.为了实现上述的技术问题,如图1、图2、图3、图4所示,转台10呈圆形结构,转台10的纵向轴线和横向轴线上被分割成4块;在转台10的纵向轴线和横向轴线上分别设置隔离板14,这样,在本实施方式中,将转台10分成4个工作区域,即打磨上件、拧紧上件、打磨工件、拧紧工件4个区域。
32.为了实现转台10旋转,如图1、图2所示,转台10的下部设置转台旋转机构20,转台10沿预设的旋转方向进行旋转,在本实施例中是顺时针旋转180
°
,当然转台10的旋转不限于旋转方向和旋转角度。
33.为了实现上述的技术问题,如图1、图2、图3、图4所示,转台10,还包括:
34.在转台10上的一侧上固定打磨上件工装4;打磨上件工装4上固定需要打磨工件;打磨上件工装4在本实施例中用于固定减速机壳。
35.在转台10上的一侧,在打磨上件工装4的一侧,固定拧紧上件工装5,在拧紧上件工装5固定需要拧紧的工件;拧紧上件工装5用于装配减速机壳。
36.为了实现上述的技术问题,如图1、图2、图3、图4所示,在转台10的另一侧,在打磨上件工装4的对面,在转台10的外侧固定打磨机器人2,打磨机器人2对打磨上件工装4上的工件进行打磨,在本实施例中打磨机器人2对打磨上件工装4上的减速机壳进行打磨。
37.为了实现上述的技术问题,如图1、图2、图3、图4所示,在转台10的另一侧,在拧紧上件工装5的对面,在转台10的外侧固定拧紧机器人3,拧紧机器人3对拧紧上件工装5上的工件进行拧紧,在本实施例中拧紧机器人3对于拧紧上件工装5上的减速机壳进行拧紧。
38.为了实现上述的技术问题,如图1、图2、图3、图4所示,在打磨机器人2的第六轴上固定打磨工具6,打磨工具6为电动打磨机,拧紧机器人3的第六轴上固定拧紧工具7,拧紧工具7为拧紧电动轴。
39.为了实现上述的技术问题,如图5所示,在打磨机器人2和打磨上件工装4的上方,在转台10上固定打磨房8,打磨房8一直延伸至打磨机器人2的后侧。
40.为了实现上述的技术问题,如图1、图2、图3、图4所示,在机器人自动打磨自动拧螺栓站的四周设置防护栏9,在拧紧机器人3一侧,在防护栏9上设置螺栓自动送料机11,将固定螺栓输送到拧紧机器人3。
41.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
技术特征:
1.一种机器人自动打磨自动拧螺栓站,其特征在于,包括:转台,在所述的机器人自动打磨自动拧螺栓站的一侧设置所述的转台;打磨机器人;在所述的转台的一侧设置所述的打磨机器人;拧紧机器人;在所述的转台的一侧,在所述的打磨机器人并行的位置上设置所述的拧紧机器人;所述的打磨机器人和所述的拧紧机器人覆盖所述的转台的工作位区域。2.根据权利要求1所述的机器人自动打磨自动拧螺栓站,其特征在于,所述的转台呈圆形结构,所述的转台的纵向轴线和横向轴线上被分割成4块;在所述的转台的纵向轴线和横向轴线上分别设置隔离板。3.根据权利要求1所述的机器人自动打磨自动拧螺栓站,其特征在于,在所述的转台的下部设置转台旋转机构,所述的转台沿预设的旋转方向进行旋转。4.根据权利要求2所述的机器人自动打磨自动拧螺栓站,其特征在于,所述的转台,还包括:打磨上件工装,在所述的转台上的一侧上固定所述的打磨上件工装;所述的打磨上件工装上固定需要打磨工件;拧紧上件工装,在所述的转台上的一侧,在所述的打磨上件工装的一侧,固定所述的拧紧上件工装,在所述的拧紧上件工装固定需要拧紧的工件。5.根据权利要求4所述的机器人自动打磨自动拧螺栓站,其特征在于,在所述的转台的另一侧,在所述的打磨上件工装的对面,在所述的转台的外侧固定打磨机器人,所述的打磨机器人对所述的打磨上件工装上的工件进行打磨。6.根据权利要求4所述的机器人自动打磨自动拧螺栓站,其特征在于,在所述的转台的另一侧,在所述的拧紧上件工装的对面,在所述的转台的外侧固定拧紧机器人,所述的拧紧机器人对所述的拧紧上件工装上的工件进行拧紧。7.根据权利要求5所述的机器人自动打磨自动拧螺栓站,其特征在于,在所述的打磨机器人的第六轴上固定打磨工具,所述的打磨工具为电动打磨机。8.根据权利要求6所述的机器人自动打磨自动拧螺栓站,其特征在于,所述的拧紧机器人的第六轴上固定拧紧工具,所述的拧紧工具为拧紧电动轴。9.根据权利要求7所述的机器人自动打磨自动拧螺栓站,其特征在于,在所述的打磨机器人和打磨上件工装的上方,在转台上固定打磨房,所述的打磨房一直延伸至所述的打磨机器人的后侧。10.根据权利要求1
‑
9中任意一种所述的机器人自动打磨自动拧螺栓站,其特征在于,在所述的机器人自动打磨自动拧螺栓站的四周设置防护栏,在拧紧机器人一侧,在所述的防护栏上设置螺栓自动送料机。
技术总结
本实用新型涉及一种机器人自动打磨自动拧螺栓站,包括:在机器人自动打磨自动拧螺栓站的一侧设置转台;在转台的一侧设置打磨机器人;在转台的一侧,在打磨机器人并行的位置上设置拧紧机器人;打磨机器人和拧紧机器人覆盖转台的工作位区域;本实用新型的实施方式同现有技术相比,利用了转台、打磨机器人和拧紧机器人对减速机壳进行去除毛刺和拧紧螺栓,打磨机器人和拧紧机器人就能够通过转台的旋转来切换工位,实现对于减速机壳进行去除毛刺和拧紧螺栓,解决了现有的减速机壳都需要人工去除毛刺和手动拧紧螺栓的技术问题。毛刺和手动拧紧螺栓的技术问题。毛刺和手动拧紧螺栓的技术问题。
技术研发人员:王际文
受保护的技术使用者:上海君屹工业自动化股份有限公司
技术研发日:2021.04.21
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。