1.本发明涉及风电技术领域,具体而言涉及一种风机转子动能控制功率平滑方法。
背景技术:
2.为了建立更清洁、更经济的能源结构,风能转换系统正越来越受到关注。然而,随着风电渗透率的不断提高,输出功率的不稳定性已成为导致电网条件异常和限制风力发电的严重问题。由于风能与风速的立方成正比,风力发电机的输出功率随风速的变化而波动。为了提高风力发电系统并网电能质量,满足并网要求,需要使风电机组的输出功率尽量平滑。平滑风机的输出功率波动,对于保证电网运行的稳定性,特别是对于电网相对薄弱的孤岛系统场景,具有重要意义。
3.目前,平抑风机输出功率波动的方法大体可分为两类。第一类称为间接功率控制策略,通过包括电池、飞轮、超级电容器等在内的储能系统(ess)实现。这种方法的实质是利用储能装置的快速充放电特性补偿风电波动的输出功率,以实现平稳的有功输出。然而,此类储能装置的引入将大大增加整个风力发电系统的运行和维护成本。第二类是直接功率控制策略。该策略旨在利用风机自身的调节能力进行功率平滑,相比于间接功率控制,不需要额外的储能装置,减少了系统成本。风机自身的功率平滑能力由以下部分组成:直流母线电压控制、桨距角控制和转子动能控制。转子动能控制将风机的转子当作虚拟的储能装置,利用转子旋转动能的存储和释放来平滑系统输出功率,与其他两种方法相比避免了直流电压波动过大及频繁变桨距带来的机械应力等问题。
技术实现要素:
4.本发明针对现有技术中的不足,以转子动能控制为基础,提供一种基于低通滤波和模糊逻辑的风机转子动能控制功率平滑方法,通过对传统最大功率跟踪方式进行传递函数分析,合理设计一阶低通滤波器以平抑功率波动。同时设计了模糊控制器生成比例系数k以考虑非最大功率跟踪控制(mppt)运行带来的功率缺额,在平抑输出功率波动的同时确保风力发电机系统的正常稳定运行。
5.为实现上述目的,本发明采用以下技术方案:
6.本发明实施例提出了一种风机转子动能控制功率平滑方法,所述平滑方法以转子动能控制为基础,基于低通滤波和模糊逻辑对风机输出功率进行平滑处理,该平滑方法包括以下步骤:
7.s1:根据风机参数推算风机在最大功率跟踪控制下的波动平抑效果,计算出固有滤波时间常数;
8.s2:设计一阶低通滤波器对最大风功率进行数字平滑处理,结合平滑效果和平滑能力,使其时间常数在大于最大功率跟踪控制的固有滤波时间常数的同时,与固有滤波时间常数保持在同一个数量级;
9.s3:考虑非最大功率跟踪控制运行的带来的功率缺额,以转速和转速变化率为依
据设计双输入单输出的模糊逻辑控制器,输入量为转速和转速变化率,输出量为比例系数k;
10.s4:给定风机合适的有功参考值以平滑功率波动,有功参考值设置为最大风功率级联所设计的一阶低通滤波器,并将系数k乘入有功参考值中以保证风机的稳定运行。
11.进一步地,步骤s1中,根据风机参数推算风机在最大功率跟踪控制下的波动平抑效果,计算出固有滤波时间常数的过程包括以下步骤:
12.s11,设风力发电机的运动方程为:
[0013][0014]
式(1)中,j为转子的转动惯量,ω为转子的角速度,tw为风力机机械转矩,te为发电机电磁转矩;
[0015]
s12,以功率来表示,将式(1)改写成:
[0016][0017]
式(2)中,pw为风力机机械功率,pe为发电机电磁功率;pw的表达式为:
[0018][0019]
其中ρ为空气密度,r为风机桨叶半径,c
p
是风能利用系数,由叶尖速比λ和桨距角β共同决定;叶尖速比λ的定义如下:
[0020]
λ=ωr/v
ꢀꢀꢀꢀ
(4)
[0021]
式(4)中v是风速;
[0022]
s13,在额定风速以下风机采用最大功率跟踪控制,桨距角设置为0,风能利用系数c
p
只和叶尖速比λ有关;当取得最佳叶尖速比λ
opt
时,风能利用系数达到最大值c
pmax
;风力机能捕获到的最大风功率为:
[0023][0024]
在最大功率跟踪控制下,电磁功率pe参考值设定为:
[0025][0026]
式(6)中,k
opt
是最大功率跟踪系数,和风机参数有关;
[0027]
s14,对pw和pe分别进行线性化得到:
[0028][0029][0030]
式中v=v0,ω=ω0表示参数的稳态值;
[0031]
s15,对式(2)进行小扰动线性化分析得到:
[0032][0033]
s16,将式(7)和式(8)代入(9),并对等式两边做laplace变换,得到最大功率跟踪
控制下风速到转速的传递函数为:
[0034][0035]
在最大功率跟踪控制下,从转速角度系统对于风速的波动起到一个一阶低通滤波器的效果,由式(10)可知,滤波时间常数与转动惯量成正比,和最大功率跟踪系数k
opt
及稳态转速ω0成反比;由于输出电磁功率和转速的立方成正比,根据式(6)输出功率相比于最大风功率也会得到平滑。
[0036]
进一步地,步骤s3中,以转速和转速变化率为依据设计双输入单输出的模糊逻辑控制器的过程包括:
[0037]
将转速划分为极大、很大、大、中、小、很小和极小七个区间,分别用eb、vb、b、m、s、vs和es表示;
[0038]
将转速变化率分为正和负两个区间,用p和n表示;
[0039]
模糊控制器输出为小于1的比例系数k,范围设定为[0.8,1],也划分为eb、vb、b、m、s、vs和es七个区间。
[0040]
进一步地,步骤s4中,将设计的低通滤波器和模糊控制输出k级联在最大风功率之后,给定风机输出有功参考值为:
[0041][0042]
本发明公开了一种基于低通滤波和模糊逻辑的风机转子动能控制功率平滑方法,包括以下步骤:s1:根据风机参数推算其在传统最大功率跟踪(mppt)控制下的波动平抑效果,计算出固有滤波时间常数;s2:设计一阶低通滤波器对最大风功率进行数字平滑处理,使其时间常数大于mppt控制的固有时间常数,以取得更好的平滑效果。但考虑到风机有限的动能存储,低通滤波参数应结合平滑效果和平滑能力两方面进行考量;s3:由于需要转速更大幅度的上升和下降来实现旋转动能的存储和释放,因此必须考虑非mppt运行的带来的损失,以转速和转速变化率为依据设计双输入单输出的模糊逻辑控制器,输出量为比例系数k;s4:给定风机合适的有功参考值以平滑功率波动,参考值设置为最大风功率级联所设计的一阶低通滤波器,并将模糊控制器生成的功率缺额系数k乘入有功参考值中以保证风机的稳定运行。
[0043]
本发明的有益效果是:
[0044]
本发明提出的基于低通滤波和模糊逻辑的风机输出功率平滑方法,通过对传统mppt方法的传递函数分析,合理设计一阶低通滤波器时间常数,使功率平滑更具有针对性及有效性。通过模糊逻辑生成缺额系数k以确保非mppt工况下的正常稳定运行。此方法通过对转速的控制来实现动能旋转动能的存储和释放,无需储能装置,能大幅降低了平抑功率波动的成本,具有较高的可行性和应用价值。
附图说明
[0045]
图1为本发明具体实施方式中模糊逻辑推理机制示意图。
[0046]
图2为本发明具体实施方式中模糊控制器隶属度函数示意图。
[0047]
图3为本发明具体实施方式中基于低通滤波和模糊逻辑的风机转子动能控制的框图。
[0048]
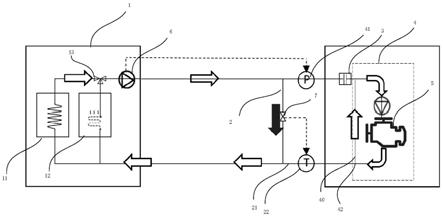
图4为本发明具体实施方式中风机的机侧矢量控制框图。
[0049]
图5为给定的一组风速序列示意图。
[0050]
图6为本发明所提控制方式下的输出功率和传统mppt控制下的输出功率对比图。
[0051]
图7为本发明所提控制方式下的风机转子转速波形示意图。
[0052]
图8为本发明所提控制方式下的模糊控制器输出k的波形示意图。
[0053]
图9为本发明具体实施方式中的风机转子动能控制功率平滑方法流程图。
具体实施方式
[0054]
现在结合附图对本发明作进一步详细的说明。
[0055]
需要注意的是,发明中所引用的如“上”、“下”、“左”、“右”、“前”、“后”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0056]
图9为本发明具体实施方式中的风机转子动能控制功率平滑方法流程图。参见图9,本发明实施例提出了一种风机转子动能控制功率平滑方法,该平滑方法以转子动能控制为基础,基于低通滤波和模糊逻辑对风机输出功率进行平滑处理,包括以下步骤:
[0057]
s1:根据风机参数推算风机在最大功率跟踪控制下的波动平抑效果,计算出固有滤波时间常数。
[0058]
s2:设计一阶低通滤波器对最大风功率进行数字平滑处理,结合平滑效果和平滑能力,使其时间常数在大于最大功率跟踪控制的固有滤波时间常数的同时,与固有滤波时间常数保持在同一个数量级。
[0059]
s3:考虑非最大功率跟踪控制运行的带来的损失,以转速和转速变化率为依据设计双输入单输出的模糊逻辑控制器,输入量为转速和转速变化率,输出量为比例系数k。
[0060]
s4:给定风机合适的有功参考值以平滑功率波动,有功参考值设置为最大风功率级联所设计的一阶低通滤波器,并将系数k乘入有功参考值中以保证风机的稳定运行。
[0061]
下面结合附图和实例对本实施例的优选技术方案做进一步的详细阐述。
[0062]
步骤s1中,根据风机参数推算风机在最大功率跟踪控制下的波动平抑效果,计算出固有滤波时间常数的过程包括以下步骤:
[0063]
s11,设风力发电机的运动方程为:
[0064][0065]
式(1)中,j为转子的转动惯量,ω为转子的角速度,tw为风力机机械转矩,te为发电机电磁转矩。
[0066]
s12,以功率来表示,将式(1)改写成:
[0067][0068]
式(2)中,pw为风力机机械功率,pe为发电机电磁功率;pw的表达式为:
[0069][0070]
其中ρ为空气密度,r为风机桨叶半径,c
p
是风能利用系数,由叶尖速比λ和桨距角β共同决定;叶尖速比λ的定义如下:
[0071]
λ=ωr/v
ꢀꢀꢀꢀ
(4)
[0072]
式(4)中v是风速。
[0073]
s13,一般而言,在额定风速以下风机采用最大功率跟踪控制,桨距角设置为0,风能利用系数c
p
只和叶尖速比λ有关;当取得最佳叶尖速比λ
opt
时,风能利用系数达到最大值c
pmax
;风力机能捕获到的最大风功率为:
[0074][0075]
在最大功率跟踪控制下,电磁功率pe参考值设定为:
[0076][0077]
式(6)中,k
opt
是最大功率跟踪系数,和风机参数有关。
[0078]
s14,由于风机惯性的存在,传统mppt控制下的输出功率本身具有一定的平滑效果。对pw和pe分别进行线性化得到:
[0079][0080][0081]
式中v=v0,ω=ω0表示参数的稳态值。
[0082]
s15,对式(2)进行小扰动线性化分析得到:
[0083][0084]
s16,将式(7)和式(8)代入(9),并对等式两边做laplace变换,得到最大功率跟踪控制下风速到转速的传递函数为:
[0085][0086]
可见在最大功率跟踪控制下,从转速角度系统对于风速的波动起到一个一阶低通滤波器的效果,由式(10)可知,滤波时间常数与转动惯量成正比,和最大功率跟踪系数k
opt
及稳态转速ω0成反比。由于输出电磁功率和转速的立方成正比,根据式(6)输出功率相比于最大风功率也会得到平滑。
[0087]
示例性地,所用算例中风机各参数如下:ρ=1.225,r=35,β=0,c
pmax
=0.48,λ
opt
=8.1,k
opt
=91281.4,j=257000。经计算,在风速为6m/s时,mppt固有滤波时间常数为0.676s;风速为12m/s时,mppt固有滤波时间常数为0.676s。
[0088]
步骤s2中,所设计的一阶低通滤波时间常数τ按如下原则确定:时间常数τ越大,功率平滑效果越明显。为了获得比mppt更为平滑的输出功率,τ应大于式(9)中mppt的固有时
间常数。同时应考虑到风机转子旋转动能有限,平滑能力也有限,过大的滤波时间常数会加剧转速的振荡,尤其是当风速快速下降时会有失稳的风险。综上所述,τ的选取应结合平滑效果和平滑能力两方面进行考量,在大于mppt的固有时间常数的同时应和其保持在同一数量级。对于上述实例,最终选定的值为τ=1s。
[0089]
步骤s3中,需要考虑转速偏离最大功率点带来的风能捕获损失,否则会导致输出参考大于实际输入的情况从而导致风机失去稳定。采用模糊控制器来推理生成小于1的比例系数k。以转速和转速变化率为输入构建模糊推理机制,模糊控制器的输出为小于1的比例系数k。由于需要转速更大幅度的上升和下降来实现旋转动能的存储和释放,因此必须考虑非mppt运行的带来的损失,以转速和转速变化率为依据设计双输入单输出的模糊逻辑控制器,输出量为比例系数k,模糊推理机制如图1所示。将转速划分为“极大”“很大”“大”“中”“小”“很小”“极小”七个区间,分别用“eb”“vb”“b”“m”“s”“vs”“es”表示。转速变化率分为“正”“负”两个区间,用“p”和“n”表示。模糊控制器输出为范围在[0.8,1],亦划分为七个区间,隶属度函数如图2所示。图8为本发明所提控制方式下的模糊控制器输出k的波形示意图。
[0090]
步骤s4中,将设计的低通滤波器和模糊控制输出k级联在最大风功率之后,给定风机输出有功参考值为:
[0091][0092]
给定转速控制框图如图3所示,发电机侧整流器矢量控制框图如图4所示。所用算例的波形如图5-7所示,其中图5为本发明方法和传统mppt方法下的输出功率对比图,可见本发明的控制方式下能够获得更平滑的输出功率。图6为本发明方法和传统mppt方法下转子转速的对比图,本方法通过转子转速更大程度的加速/减速来实现旋转动能的存储和释放,以平抑输出功率波动。图7为本发明方法下的模糊控制器输出k的波形,所提出的模糊推理机制能根据风机转速状态有效响应非mppt运行带来的功率缺额,兼顾发电效率和稳定性,维持风机的正常稳定运行。
[0093]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。