1.本发明涉及减振领域,特别涉及一种基于时滞技术与非线性能量阱的混合式动力吸振器及方法。
背景技术:
2.振动问题广泛存在于各种机械设备和工程结构中,且易由人为或自然因素引发。振动不仅影响精密仪器的功能、缩短机器的使用寿命,也会导致工程结构的损伤变形,甚至危及结构安全,所以应将振动控制在合理的、能接受的范围之内,以避免经济损失或灾难性事故。
3.一方面,机械设备向大(微)型化、高精密等方向快速发展,对减振装置的性能要求也愈加苛刻,既要能够在一个较宽的频域内保持较高的减振率,又要有效缓解多种复杂激励耦合作用对系统的干扰。另一方面,随着工程结构跨度的增大和新材料的应用,结构变得更轻和更柔,其非线性振动问题比以往更为突出。因此,亟需开发一种非线性宽频吸振技术与方法解决非线性多模态振动问题。
技术实现要素:
4.为了解决上述技术问题,本发明提供结构简单的基于时滞技术与非线性能量阱的混合式动力吸振器,并提供一种减振率高的基于时滞技术与非线性能量阱的混合式动力吸振方法。
5.本发明解决上述技术问题的技术方案是:一种基于时滞技术与非线性能量阱的混合式动力吸振器,包括主系统、质量块、非线性能量阱单元和时滞反馈控制单元,非线性能量阱单元和时滞反馈控制单元设置在主系统和质量块之间,非线性能量阱单元包括第一阻尼元件和两个线性弹簧,第一阻尼元件两端分别连接主系统和质量块,两个线性弹簧呈八字形摆设,两个线性弹簧的上端固定在质量块上,两个线性弹簧下端固定在主系统上,两个线性弹簧共同构成非线性立方刚度弹簧;所述时滞反馈控制单元包括弹簧、第二阻尼元件和驱动器,弹簧、第二阻尼元件的两端均分别连接主系统和质量块,驱动器与质量块连接,主系统上设有振动传感器。
6.上述基于时滞技术与非线性能量阱的混合式动力吸振方法,包括以下步骤:
7.步骤一:对主系统的振动状态进行判断,若主系统需要对多阶模态进行控制,则直接进入步骤三;若主系统需要控制某一固定阶模态,则继续判断主系统的振动是否超过预设的振动阈值,若超过,则进入步骤三,若没有超过,则进入步骤二;
8.步骤二:采用非线性能量阱单元对主系统实现被动控制;
9.步骤三:非线性能量阱单元的被动控制与时滞反馈控制单元的主动控制联合工作,实现混合控制。
10.上述基于时滞技术与非线性能量阱的混合式动力吸振方法,所述步骤二中,非线性能量阱单元中,线性弹簧刚度系数为k,线性弹簧与水平直线夹角为α,质量块到线性弹簧
底端的水平距离l,质量块到线性弹簧底端的垂直距离u,非线性能量阱单元提供的非线性恢复力f(u)近似表达为:
[0011][0012]
式中o(u5)表示的是高阶项。
[0013]
上述基于时滞技术与非线性能量阱的混合式动力吸振方法,所述步骤三中,时滞反馈控制单元为基于时滞反馈控制策略算法下提供最优控制参数,采用主动质量阻尼器构建,通过步进电机给质量提供主动控制力,其中时滞反馈最优控制参数计算,通过求解非线性振动幅频方程获得振幅峰值,以此为约束条件,以衰减率为目标函数,利用最优化原理确定最佳控制参数,时滞值取τ=(2k
′
π π/2),(k
′
=0,1,2,3,
…
);
[0014][0015]
s.t.μn≤0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0016]
k1=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0017][0018][0019][0020]
式中:r为衰减率控制范围参数;q表示主系统的位移,k
dn
为位移反馈控制增益,τ是时滞值,μn是主系统的线性阻尼系数,σ表示调谐参数,ω为外激励频率,c是非线性能量阱单元的阻尼系数,ωn是主系统的固有频率;μe、k1、σe、k2均为中间变量,μe=μ
n-k
dn
sinωnτ,
[0021]
式(3)~式(5)保证系统的非零解为渐进稳定的;式(6)为振动峰值的取值条件;式(7)为衰减率的约束条件;通过引进调节参数,根据具体工程要求设置衰减率数值,并求出与其相匹配的最优控制参数。
[0022]
上述基于时滞技术与非线性能量阱的混合式动力吸振方法,所述步骤三中,考虑阻尼和非线性刚度,采用谐波平衡法和多尺度法研究混合控制的动力学行为,在双频简谐激励下,动力学方程为:
[0023]
[0024]
式中y表示非线性能量阱单元的位移,其中分别表示q,y对时间t的一次导数,别表示q,y对时间t的二次导数;μn,ωn,kc分别是主系统的线性阻尼系数、固有频率和弱非线性刚度系数,f1和f3是1:1主共振和1:3亚谐波共振激励的幅值;m,k,c分别是非线性能量阱单元的质量比、非线性立方刚度和阻尼系数;
[0025]
定义主系统和非线性能量阱单元之间的相对位移z:z=q-y,因此,式(8)变为:
[0026][0027]
在激励为1/3亚谐波共振的情况下,主系统幅频响应方程为:
[0028][0029]
本发明的有益效果在于:本发明非线性能量阱单元和时滞反馈控制单元来设计混合式动力吸振器,吸振器的非线性弹簧是采用线性弹簧根据几何非线性产生本质强非线性,时滞反馈控制通过驱动器对抗质量块将惯性控制力施加于主系统实施振动控制,能够在一个较宽的频域内保持较高的减振率,有效缓解多种复杂激励耦合作用对系统的干扰,解决了传统吸振器在非线性宽频吸振技术和非线性多模态振动时的难题。
附图说明
[0030]
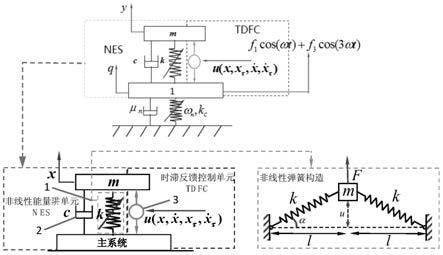
图1是本发明混合式动力吸振器的示意图。
[0031]
图2是振子在不同控制条件下的主共振响应幅频曲线。
[0032]
图3是振子在不同控制条件下的时程曲线。
具体实施方式
[0033]
下面结合附图和实施例对本发明作进一步的说明。
[0034]
如图1所示,一种基于时滞技术与非线性能量阱的混合式动力吸振器,包括主系统、质量块、非线性能量阱单元nes和时滞反馈控制单元3,非线性能量阱单元和时滞反馈控制单元3设置在主系统和质量块之间,非线性能量阱单元包括第一阻尼元件2和两个线性弹簧,第一阻尼元件2两端分别连接主系统和质量块,两个线性弹簧呈八字形摆设,两个线性弹簧的上端固定在质量块上,两个线性弹簧下端固定在主系统上,两个线性弹簧共同构成非线性立方刚度弹簧1;所述时滞反馈控制单元3包括弹簧、第二阻尼元件和驱动器,弹簧、第二阻尼元件的两端均分别连接主系统和质量块,驱动器与质量块连接,主系统上设有振动传感器。
[0035]
当系统接收到激励时,非线性能量阱单元具有鲁棒性、工作频带宽、能量单向传递等优点,但其对系统设计参数和外界激励条件的不确定较为敏感,减振机制激发存在外部输入临界值;时滞反馈控制单元3能够实现实时反馈控制,但实现振动控制所需的外部能源较大,控制装置较复杂,存在适用性和耐久性问题,主动控制是有外加能源的控制,在振动控制过程中,根据所检测到的振动信号,应用一定的控制策略,经过实时计算,进而通过驱动器对控制目标施加一定的影响,达到抑制或消除振动的目的,因此设计基于时滞技术和
非线性能量阱的混合式动力吸振器。
[0036]
一种基于时滞技术与非线性能量阱的混合式动力吸振方法具体包括以下步骤:
[0037]
步骤一:对主系统的振动状态进行判断,若主系统需要对多阶模态进行控制,则直接进入步骤三;若主系统需要控制某一固定阶模态,则继续判断主系统的振动是否超过预设的振动阈值,若超过,则进入步骤三,若没有超过,则进入步骤二。
[0038]
步骤二:采用非线性能量阱单元对主系统实现被动控制。
[0039]
非线性能量阱单元中,线性弹簧刚度系数为k,线性弹簧与水平直线夹角为α,质量块到线性弹簧底端的水平距离l,质量块到线性弹簧底端的垂直距离u,非线性能量阱单元提供的非线性恢复力f(u)近似表达为:
[0040][0041]
式中o(u5)表示的是高阶项。
[0042]
步骤三:非线性能量阱单元的被动控制与时滞反馈控制单元的主动控制联合工作,实现混合控制。
[0043]
时滞反馈控制单元为基于时滞反馈控制策略算法下提供最优控制参数,采用主动质量阻尼器构建,通过步进电机给质量提供主动控制力,其中时滞反馈最优控制参数计算,通过求解非线性振动幅频方程获得振幅峰值,以此为约束条件,以衰减率为目标函数,利用最优化原理确定最佳控制参数,时滞值取τ=(2k
′
π π/2),(k
′
=0,1,2,3,
…
);
[0044][0045]
s.t.μn≤0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0046]
k1=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0047][0048][0049][0050]
式中:r为衰减率控制范围参数;q表示主系统的位移,k
dn
为位移反馈控制增益,τ是时滞值,μn是主系统的线性阻尼系数,σ表示调谐参数,ω为外激励频率,c是非线性能量阱单元的阻尼系数,ωn是主系统的固有频率;μe、k1、σe、k2均为中间变量,μe=μ
n-k
dn
sinωnτ,
[0051]
式(3)~式(5)保证系统的非零解为渐进稳定的;式(6)为振动峰值的取值条件;式(7)为衰减率的约束条件;通过引进调节参数,根据具体工程要求设置衰减率数值,并求出
与其相匹配的最优控制参数。
[0052]
考虑阻尼和非线性刚度,采用谐波平衡法和多尺度法研究混合控制的动力学行为,在双频简谐激励下,动力学方程为:
[0053][0054]
式中y表示非线性能量阱单元的位移,其中分别表示q,y对时间t的一次导数,别表示q,y对时间t的二次导数;μn,ωn,kc分别是主系统的线性阻尼系数、固有频率和弱非线性刚度系数,f1和f3是1:1主共振和1:3亚谐波共振激励的幅值;m,k,c分别是非线性能量阱单元的质量比、非线性立方刚度和阻尼系数;
[0055]
定义主系统和非线性能量阱单元之间的相对位移z:z=q-y,因此,式(8)变为:
[0056][0057]
在激励为1/3亚谐波共振的情况下,主系统幅频响应方程为:
[0058][0059]
基于设定参数,图2给出了振子在不同控制条件下的主共振响应幅频曲线,设定外激励幅值f1=0.001,f3=0。可以看出,振子在无控条件下的幅频响应曲线向右弯曲,nes控制下的幅频响应较无控条件下的减小了70.8%,且从曲线偏转程度来看,nes削弱了结构的非线性。混合控制下的幅频曲线较前面两种控制条件下的幅值更小,其中较nes控制下的幅值减小了85.7%,较无控条件下的减振率达到了95.8%。由此可见:时滞减振技术和nes能实现振动控制并具有良好的减振效果。
[0060]
图3给出了振子在不同控制条件下的时程曲线,假定f1=0.001,f3=0,振子在无控下的响应幅值为0.035,当k=4000,c=0.08,m=0.1时,在非线性能量阱下的振子响应较无控下的大幅减少,减振率达到了65.7%,当k
dn
=0.06,τ=9π/5时,时滞减振技术与nes的混合控制下的振子幅值较无控下的减小了82.8%。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。