1.本公开的各种方面涉及用于植入物和部署装置的系统和方法。
背景技术:
2.良性前列腺增生(bph),也称为良性前列腺肥大,是前列腺的非癌性增大。bph是主要在年长男性中出现的状况。针对bph的治疗选项包括药物治疗、外科手术(例如,移除增大的前列腺组织)、以及微创手术(例如,针消融、汽化电切术、温热疗法和支架插入)。当前,如果药物治疗无效,则大多数患者选择外科手术治疗。然而,微创手术正变得越来越流行和普遍。相应地,本文公开的是用于使用改进的植入物和部署装置来治疗bph的系统和方法。
技术实现要素:
3.输送装置和系统的示例性实施例公开为系统的构件和使用系统和/或其构件的方法的示例性实施例。输送装置的某些实施例可包括:凸轮筒,其具有在凸轮筒的远侧端部处的第一凹槽;鞘,其位于凸轮筒的内腔内,以用于存储可植入装置;以及第一凸轮从动件,其联接至鞘。在一些实施例中,第一凸轮从动件构造成在凸轮筒的第一凹槽内行进,且平移鞘,这引起鞘缩回到凸轮筒中。
4.在一些实施例中,凸轮筒可包括设计成平移联接至推动器轴的第二凸轮从动件的第二凹槽。第二凸轮从动件的平移引起推动器轴沿远侧方向推动,以协助部署附接至推动器轴的远侧端部的可植入装置。第一凹槽可设置在凸轮筒的远侧端部附近,且第二凹槽可设置在凸轮筒的近侧端部附近。在一些实施例中,凹槽中的各个可由多个链接的螺旋槽口和/或径向槽口形成。在一些实施例中,第一凹槽和第二凹槽可布置成使得第一凸轮从动件横穿第一凹槽的螺旋槽口,而第二凹槽的第二凸轮从动件同时或同时地横穿第二凹槽的径向槽口。以此方式,两个凸轮从动件的移动不需要在每个时间点相同。这允许凸轮从动件的两个主要类型的协同移动。第一类型的协同移动是,当第一凸轮从动件沿近侧方向缩回鞘时,同时第二凸轮从动件保持推动器轴轴向地静止。第二类型的协同移动是,当第一凸轮从动件保持鞘轴向地静止时,同时第二凸轮从动件沿远侧方向将推动器轴向前推。
5.在检查以下附图和详细描述时,本文描述的主题的其它系统、装置、方法、特征和优点对于本领域技术人员将会是或将变得显而易见。意图的是,所有这些额外的系统、方法、特征和优点包括在本说明书中,且在本文描述的主题的范围内,且由所附权利要求保护。示例性实施例的特征无论如何不应解释为限制所附权利要求(在那些特征在权利要求中没有直接表述的情况下)。
附图说明
6.前面概述以及以下详细描述在结合附图阅读时更好理解。包含在本文中且形成说明书的一部分的附图示出了多个实施例,且与描述一起用于进一步论述涉及的原理,且允许一个或多个相关领域的技术人员制造和使用公开的技术。
7.图1绘出部署在尿道内的可植入装置的示例性实施例。
8.图2
‑
3是绘出了可植入装置的示例性实施例的透视图。
9.图4a
‑
4e绘出了根据本公开的一些实施例的可植入装置的示例性部署程序。
10.图4f是绘出了包含在鞘内且附接至推动器轴的可植入装置的示例性实施例的透视图。
11.图4g和4h是绘出了抓取器的示例性实施例的透视图。
12.图5a是绘出了根据本公开的一些示例性实施例的输送装置的透视图。
13.图5b是绘出了根据本公开的一些示例性实施例的输送装置的一部分的截面视图。
14.图5c和6a是绘出了根据本公开的一些示例性实施例的输送装置的透视图。
15.图6b是绘出了输送装置的示例性实施例的侧视图。
16.图7a
‑
7b、8a
‑
8b和9是绘出了根据本公开的一些示例性实施例的输送装置的透视图。
17.图10a
‑
10n是绘出了部署程序和部署的进程的示例性实施例的侧视图。
18.图11是绘出了根据本公开的一些示例性实施例的凸轮筒的透视图。
19.图12a
‑
12i是绘出了根据本公开的一些示例性实施例的输送装置的锁定机构的透视图。
20.图12j是绘出了根据本公开的一些示例性实施例的输送装置的锁定机构的截面视图。
21.图13和14是绘出了输送装置的示例性实施例的透视图。
22.图15和16是绘出了根据本公开的一些示例性实施例的可植入装置的部署过程的框图。
具体实施方式
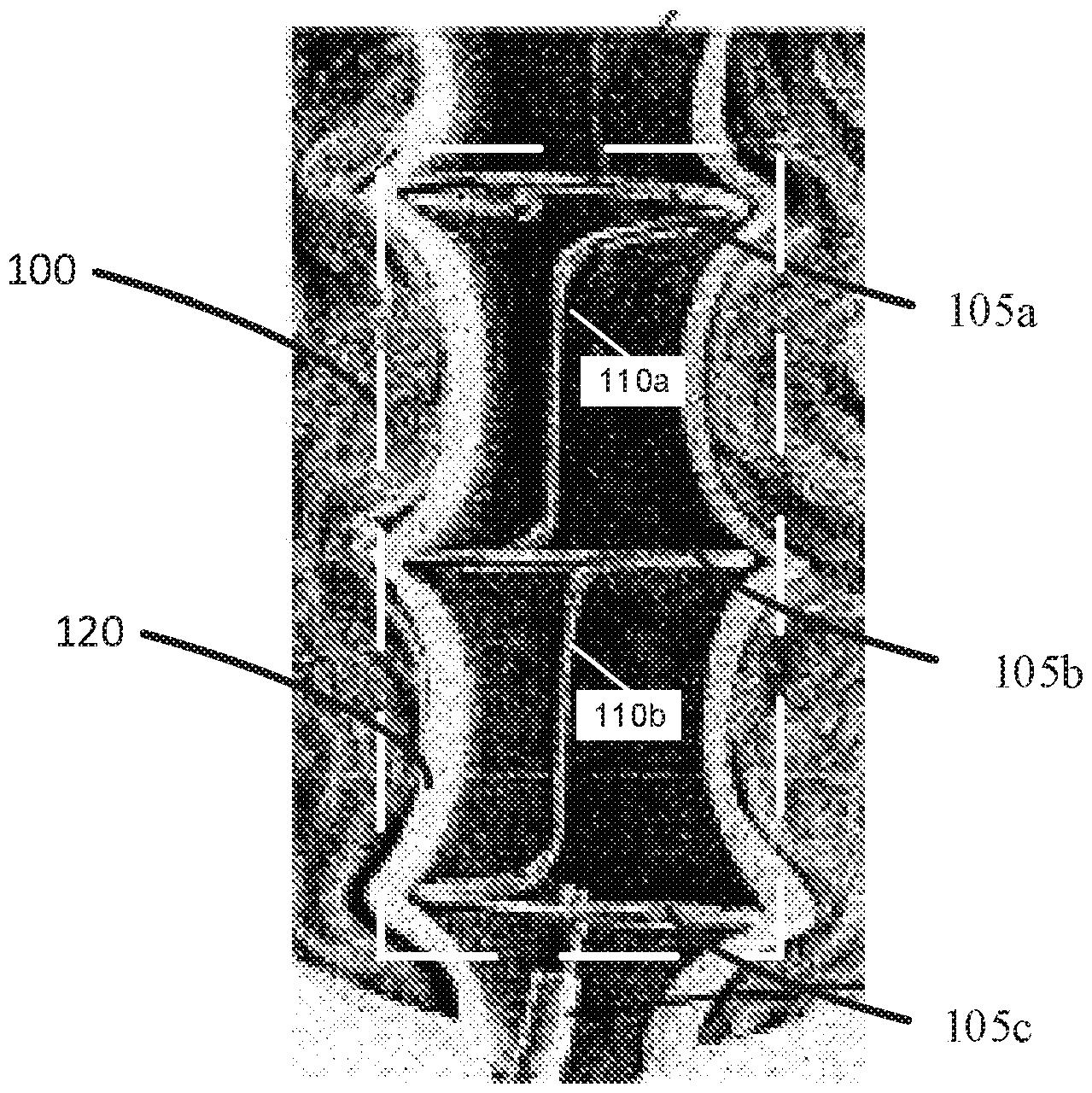
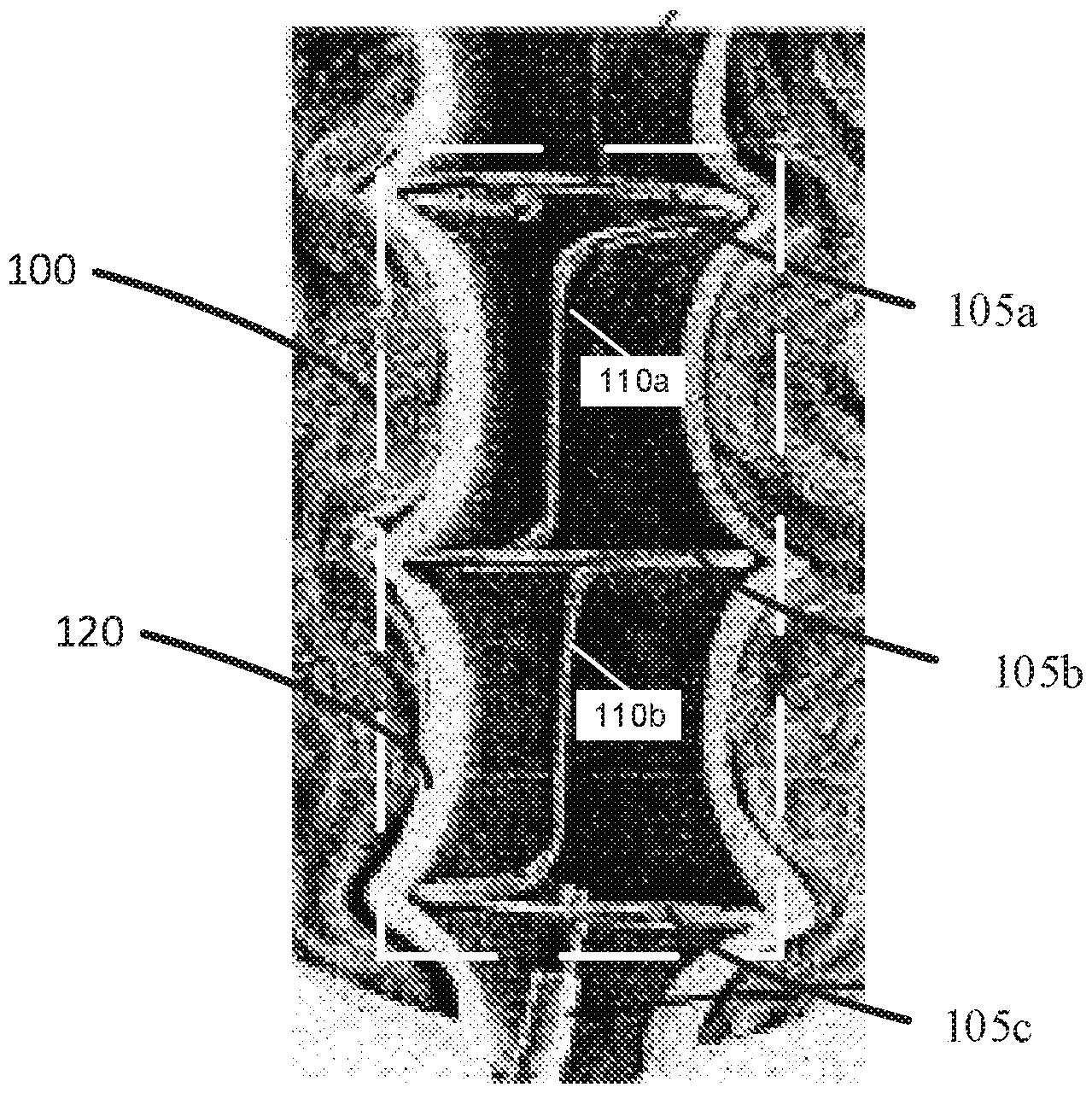
23.概述如之前提到,用于bph相关的泌尿阻塞的治疗选项包括药物治疗和外科手术。然而,两个治疗选项具有许多不利副作用和风险。以较少风险和副作用的用于bph的备选治疗方案是使用可植入装置,其机械地保持尿道开放。图1示出了根据本公开的一些实施例的植入在尿道内的可植入装置100。在一些实施例中,可植入装置100可为部分螺旋结构,且可具有两个或更多个环部件(例如,环部件105a、105b和105c)以及一个或多个连接部件(例如,110a和110b)。如图所示,可植入装置100的环部件105a、105b和105c将尿道120维持在开放状态。装置100可按期望制造成各种尺寸,使得各个环部件105的半径确定开口的尺寸,且各个连接部件110的长度确定环部件105之间的间距。
24.可植入装置100可使用输送装置(下文描述)部署到尿道120中,输送装置可使可植入装置100相对于输送鞘旋转,且同时将其从在输送装置内露出。以此方式,尿道的壁不会由可植入装置的突然推动或刮运动刺激。可植入装置100的轻柔自旋部署可降低撕裂或断裂尿道的壁的风险。在其它实施例中,装置100可在不使它相对于输送装置旋转的情况下部署。一旦可植入装置100在尿道120内就位,输送装置可释放可植入装置100。取决于患者的状况和尿道解剖学,一个或多个可植入装置100或不同尺寸的(例如,较大半径、较长轴向长度)可植入装置100可植入尿道120中。
25.可植入装置图2示出了根据本公开的一些示例性实施例的可植入装置100。在该情况下,可植入装置100包括三个环部件105a、105b和105c以及两个连接部件110a和110b,以形成支撑或类台架结构。连接部件110a在环部件105a和105b之间桥接,且连接部件110b在环部件105b和105c之间桥接。为了增加可植入装置100的环部件密度,额外的环105可加入且同时连接部件110的长度可缩短以维持相同的总体长度。可植入装置100还包括端接部件215,其将最末环部件(例如,105c)连接至端部部件210。
26.连接部件110中的各个可大致平行于中心轴线220,其可为环部件105的公共轴线。换句话说,连接部件110a和110b中的各个大致垂直于环部件105的平面。在该实施例中,各个环部件105的平面大致平行于其它环部件105的平面且大致垂直于公共轴线220。在一些实施例中,各个环部件105的平面可相对于公共轴线220成角度。各个连接部件110还可相对于公共轴线220成角度而非平行。连接部件110a和110b不必须长度相等。例如,连接部件110a可为第一长度(例如,6mm),且部件110b可为第二长度(例如,7mm)。环间距可调整以改进稳定性、性能和组织支撑。如已经陈述,可植入装置100可以以交替方式具有两个或更多个环部件105以及一个或多个连接部件110,而不脱离本公开的范围。
27.在一些实施例中,各个环部件105以与相邻环部件105的缠绕方向相反的方向围绕轴线220缠绕。例如,环部件105a沿第一(例如,顺时针)方向缠绕,且下一个环部件105b沿第二相反的(例如,逆时针)方向缠绕。最终,最末环部件105c沿第一方向缠绕。在一些实施例中,所有环部件105沿相同方向缠绕,顺时针或逆时针。
28.可植入装置100还可包括远侧端部部件205和近侧端部部件210。部件205和210中的各个可为增大无损伤形状,诸如圆化增大形状,像部分球,其起到两个主要功能。第一,无损伤形状为尿道壁提供光滑和非研磨接触表面。在部署可植入装置100期间,在可植入装置100被部署时,部件205可抵靠尿道壁摩擦。因此,无损伤形状可减小与尿道120的壁的摩擦。当部件205或210的表面区域较大且优选圆化时,由于其跨过较大表面区域分布力,其对组件损伤较少。同样,增大形状可提供表面,以用于抓取构件保持可植入装置100。抓取构件可具有圆形槽口,其设计成接合圆形部件205或210且将其锁定就位。抓取构件可设置在输送装置的轴(将在后面论述)的远侧端部处。
29.图3示出了根据本公开的一些实施例的可植入装置100。在该实施例中,可植入装置100包括四个环部件105a、105b、105c和105d。各个环部件105由连接部件(例如,部件110a、110b或110c)分离。各个环部件105与一个或两个相邻环部件105相比具有相反缠绕方向。例如,环部件105a具有逆时缠绕方向,环部件105b具有顺时针缠绕方向,且环部件105c具有逆时缠绕方向。各个环部件305可具有公共轴线220,且可处于与所有其它环部件105平行的平面。
30.连接部件110a、110b或110c中的各个可平行于轴线220或大致正交于环部件105的平面。备选地,各个连接部件110可相对于环部件105的平面或轴线320具有角度(除了90度之外的角度)。
31.图4a
‑
4e示出了根据本公开的一些实施例的将可植入装置100部署到尿道中的过程。如图4a所示,部署可植入装置100的过程可通过盘旋或自旋出环部件105a来开始。下一步,连接部件110a通过相对于装置100缩回鞘405(图4b)来露出,然后第二环部件105b可通
过进一步旋转连接至可植入装置100(图4c)的轴(未示出)来部署。在图4d中,第二连接部件110b可通过再次缩回鞘405来露出。最终,最末环部件105c可盘旋或自旋出。一旦可植入装置100就位,输送装置可通过缩回鞘405来释放可植入装置,以露出位于轴的远侧端部处的抓取构件的开口。
32.在其它实施例中,装置100从鞘405内的顺序露出可通过相对于鞘405前移装置100而发生,这与当装置100保持在静止位置时缩回鞘405相反。在还有其它实施例中,露出可由两种运动的组合而发生,其中装置100可在鞘405向近侧缩回的同时向远侧移动。在一些实施例中,连接部件110a、110b和110c可具有可变长度。以此方式,任何两个环部件之间的距离可改变。
33.图4f示出根据本公开的一些实施例的在部署之前收纳在鞘425的远侧区域内的可植入装置100。鞘425可具有径向开口(例如,由切割形成),以改进灵活性和/或可输送性。在一些实施例中,抓取器450在轴460的端部处提供。抓取器450可包括槽口,其具有与可植入装置100的无损伤端部210互补的形状。当轴460旋转和平移时,抓取器450也旋转和平移,这继而将可植入装置100旋转和推出鞘425。换句话说,轴460的旋转和平移的组合引起可植入装置100的对应旋转和平移,这引起可植入装置100轻柔螺旋(或自旋)出鞘425且到患者的尿道中。当处于与抓取器450的联接状态的装置100的无损伤端部210从鞘425的内腔内露出至外部时,端部210和抓取器450从由鞘425给予的约束自由化且不再保持在联接状态,在该点,端部210从抓取器450的凹穴475(也见图4g)脱离。
34.图4g和4h示出了根据本公开的一些示例性实施例的抓取器450的示例性实施例。如图4g中所示,抓取器450包括腔/凹穴475,以用于保持可植入装置100的端部部分(例如,无损伤部件210)。图4h示出了附接至抓取器450的可植入装置100。当可植入装置不在鞘425内时,无损伤部件210可从凹穴475释放(例如,移动出),因为它不再由鞘425的内壁约束。因此,一旦鞘425缩回,则可植入装置释放。
35.输送/取回装置图5a示出了根据本公开的一些实施例的输送装置500。输送装置500包括主本体505、前盖507和端盖510。主本体505、前盖507和端盖510中的各个具有内腔,以包含和包围凸轮筒515和旋钮520。主本体505可具有大致柱状形状的开口,诸如中空管。前盖507可具有带有窄开口的倾斜表面,以包围和装固适配器轴523,其可具有中空内部部分,以接收和包含约束鞘425(未示出,见图13)。适配器轴523还可包括公鲁尔配合件527,以允许各种装置(例如,膀胱镜)附接至适配器轴523。
36.凸轮筒515可包括凸轮筒515的表面上的凹槽530。凹槽530可穿过凸轮筒515的壁完全切割,以允许凸轮从动件535配合穿过凹槽530。凸轮从动件535可装固地(或刚性地)联接至轴驱动器本体(未示出,见图5b),其也装固地联接至输送装置500的轴460(未示出,见图7a)。图5b示出了联接至轴驱动器本体565的凸轮从动件535的示例性实施例。图5b还示出了刚性地联接至轴驱动器本体565的轴460。图5c是设置在凹槽530中的凸轮从动件535的局部放大视图。各个凸轮从动件535或550可具有t形或i形截面,其中凸缘部分延伸穿过且延伸出相应的抗旋转槽口(例如。槽口537或槽口560)。凸轮从动件535和550可具有其它形状,诸如例如柱体,而仍在本公开的范围内。
37.旋钮520由主本体505可旋转地装固,且固定地附接至凸轮筒515。在一些实施例
中,旋钮520可固定地附接至凸轮筒515,例如,利用销,使得如果旋钮520在主本体505内旋转,则凸轮筒515将也随旋钮520旋转。例如,如果旋钮520逆时针旋转,则凸轮筒515也将逆时针旋转。旋钮520可包括前表面上的压痕521(也见图7b),其与附连至前盖507的柱塞522相互作用,以向用户提供旋钮成功地转动的可听见的滴答声和触觉反馈。
38.图6a示出了输送装置500,其中旋钮520被移除。在一些实施例中,凸轮筒515包括位于凸轮筒515的远侧端部处的第二凹槽540。输送装置500还包括第二凸轮从动件(例如,螺母、销等)550,其在凸轮筒515旋转时在凹槽540内行进。如图6a中所示,凸轮从动件535和550两者在其相应的起始位置。凹槽530和540(以及后面描述的凹槽1105)也可描述为槽口或路径。凹槽530、540和1105的形状可且将取决于实施方式的细节而改变。在一些实施例中,凹槽530、540和1105的形状可描述为形成部分螺旋路径。
39.凸轮从动件535在凸轮筒515的近侧端部(端盖510附近)处起始,且在543处在凸轮筒515的远侧端部(前盖507附近)结束。在一些实施例中,存在用于凸轮从动件535的两个端部位置。位置542是倒数第二位置,且位置543是在凹槽530的端部处的最末位置。倒数第二位置542和最末位置543之间的凹槽是径向槽口559,其设计成允许凸轮筒515旋转,而没有轴460(未示出,见图7a)或凸轮从动件535的任何轴向平移。
40.在输送装置500的初始设定,凸轮从动件535可设定成在倒数第二位置542停止,使得其不可移动超过位置542,而不需要用户解锁凸轮筒515。防止凸轮从动件535从倒数第二位置542移动至端部位置543的锁定机构将在下文详细描述。
41.如图所示,当凸轮筒515旋转时,凸轮从动件535在位置541处起始,且移动至倒数第二位置544a。一旦在倒数第二位置544a处,凸轮筒515默认旋转地锁定,以防止凸轮从动件550移动至端部位置544b。类似于凸轮从动件535,凸轮从动件550不可移动至端部位置544b,而不需要用户在凸轮筒515的近侧端部处解锁锁定机构。这是用来防止通过鞘425的缩回而意外释放可植入装置100。
42.在一些实施例中,凹槽530可包括多个倾斜槽口(在一些情况下,螺旋)和径向槽口(例如,分别槽口557和559),以及其它形状,其可链接在一起来形成期望路径(其继而将期望移动给予构件)。在本描述中,某些倾斜槽口将描述为旋转,但用语螺旋在本文中宽泛地使用,且不需要恒定或连续坡度。事实上,这些倾斜槽口可改变,使得如果期望,坡度可从正反转至负(像“v”)。
43.凹槽530可具有三个或更多个螺旋槽口和径向槽口。倾斜槽口可为带有角度的凸轮筒515中的开口,其在旋转期间将槽口沿凸轮筒515的纵向轴线移动。径向槽口可包括垂直于凸轮筒515的纵向轴线的开口,使得凸轮从动件在槽口中移动,但不沿纵向方向平移。
44.在一些实施例中,凸轮筒515上的螺旋槽口的数量可对应于可植入装置100中的环部件105的数量。类似地,凸轮筒515上的径向槽口的数量可对应于可植入装置100中的连接部件110加端接部件(例如,部件215)的数量。例如,如图2中所示,可植入装置100具有三个环部件(即,105a、105b和105c)、两个连接部件(即,110a和110b)和端接部件215。相应地,凹槽530具有三个螺旋槽口557a、557b、557c以及三个径向槽口559a、559b、559c(见图6b)。这里,各个径向槽口559垂直于凸轮筒515的纵向轴线。因此,其仅可使凸轮从动件535围绕凸轮筒515的纵向轴线旋转,且不会引起凸轮筒515和/或轴460的任何平移。径向槽口559还可描述为非倾斜槽口。由于各个螺旋槽口557具有轴向平移构件,在凸轮筒515旋转时,其迫使
凸轮从动件535(和轴驱动器本体565)沿轴向方向平移。
45.凸轮从动件535构造成在凹槽530内平移,同时停留在主本体505上的纵向槽口537内。纵向槽口537(也见图14)通过防止凸轮从动件535随着凸轮筒515旋转来约束凸轮从动件535仅沿轴向方向移动。以此方式,凸轮从动件535由槽口537迫使沿凸轮筒515的纵向轴线平移。
46.在一些实施例中,凹槽540通过将多个径向槽口和螺旋槽口链接在一起来形成。凹槽530和540可布置在凸轮筒515上,使得当凸轮从动件535横穿凹槽530的螺旋槽口时,凸轮从动件550同时横穿凹槽540的径向槽口。类似地,当凸轮从动件535横穿凹槽530的径向槽口时,凸轮从动件550同时横穿凹槽540的螺旋槽口。
47.不同地陈述,在凸轮从动件535和550之间存在至少两种主要类型的协同移动。第一类型的协同移动是,当凸轮从动件535横穿凹槽530的螺旋槽口时,而凸轮从动件550同时横穿凹槽540的径向槽口。在第一协同移动期间,凸轮从动件535和轴460轴向地平移,而凸轮从动件550同时横穿径向槽口(无轴向移动)。这引起鞘驱动器本体(见图7a的物件570)围绕其自身轴线(或凸轮筒515的纵向轴线)旋转,而没有任何轴向移动。关于部署,在该阶段期间,可植入装置100的一部分前移出鞘425,而鞘425仍静止,因为没有鞘驱动器本体的轴向移动。
48.第二类型的协同移动涉及,凸轮从动件535横穿凹槽530的径向槽口,而凸轮从动件550同时横穿凹槽540的螺旋槽口。在第二类型的协同移动期间,凸轮从动件550轴向地朝主本体550的近侧端部移动,而凸轮从动件535仍轴向静止。凸轮从动件550的轴向移动由凹槽530的螺旋槽口旋转引起,这沿抗旋转套筒555中的槽口推动凸轮从动件550。抗旋转套筒555中的槽口平行于筒515的纵向轴线。(套筒555中的该槽口在图10a中示出为物件650)。该运动的效果是将鞘425缩回到凸轮筒515的内腔中。
49.在一些实施例中,凸轮从动件535和550可独立于彼此移动。换句话说,凸轮从动件535和550中的各个可联接至单独和离散的凸轮。以此方式,凸轮从动件535可沿远侧方向移动,而凸轮从动件550可同时沿近侧方向移动,而非保持轴向静止。
50.图7a示出了根据本公开的一些实施例的凸轮筒515的剖视图,以示出输送装置500的内部构件。如图所示,输送装置500可包括轴460、抗旋转套筒555(剖视图)、轴驱动器本体565和鞘驱动器本体570。轴驱动器本体565设置在凸轮筒515的内腔567内。轴驱动器本体565可尺寸确定成可滑动地配合到内腔567中且沿凸轮筒515的纵向轴线装固轴460。轴460刚性地联接至轴驱动器本体565,使得当轴驱动器本体565在内腔567内平移和/或旋转时,轴460将经历对应的平移和旋转。轴驱动器本体565还装固地附接至凸轮从动件535,因此当凸轮从动件535在凹槽530内移动时,轴驱动器本体565将如由凹槽530指出的那样旋转和平移。如之前提到,主本体505上的槽口537设计成约束凸轮从动件535,使得凸轮从动件535仅可沿凸轮筒515的纵向轴线来回移动。
51.输送装置500还可包括鞘驱动器本体570,其装固地附接至鞘425和凸轮从动件550。鞘驱动器本体570包括内腔以在接近凸轮筒515的远侧端部的端部处接收鞘425。鞘驱动器本体570的内腔还可接收和经过轴460到鞘425中。鞘驱动器本体570可尺寸确定成可滑动地配合到抗旋转套筒555的内腔中,其也适当地尺寸确定成保持鞘驱动器本体570,使得鞘驱动器本体的纵向轴线沿凸轮筒515的纵向轴线。以此方式,当轴460朝凸轮筒515的远侧
端部平移时,轴460可容易地经过鞘驱动器本体570且到鞘425中(也见图7b)。
52.图7b是绘出旋钮520定位之处的输送装置100的一部分的剖视图,而没有抗旋转套筒555。如图所示,鞘425可端接在鞘驱动器本体570内。然而,鞘425在端接端部处具有开口,以允许轴460经过。
53.当凸轮筒515旋转时,凹槽540在凸轮从动件550下方移动,且迫使凸轮从动件550在抗旋转套筒555的槽口内平移。凸轮从动件550的平移还引起鞘驱动器本体570向近侧移动(朝轴驱动器本体565)。鞘驱动器本体沿近侧方向的平移引起鞘425缩回。抗旋转套筒555可使用销和/或粘合剂或通过使用主本体505的内腔上的抗旋转机械特征刚性地附连至主本体505。
54.如图7a中所示,凸轮从动件535和550在其初始未部署位置。一旦凸轮筒515由旋转旋钮520(未示出,见图5)旋转,凸轮从动件535将沿凹槽520朝倒数第二位置542移动且随后至端部位置543(未示出,见图6a)。在另一视角,当凸轮筒515旋转时,凹槽530在凸轮从动件535下方移动,其由于由槽口537提供的约束而仅允许沿轴向方向移动。如图7a中所示,槽口537沿主本体505且平行于凸轮筒515的纵向轴线从起始位置705行进至端部位置543。当凸轮从动件535朝端部位置543移动时,凸轮从动件550在抗旋转套筒555(也见图6和图10a)的凹槽540和槽口650内从起始位置541移动至倒数第二位置544a且随后至端部位置544b(也见图6a)。
55.图8a示出了接近旋转/部署程序结束的输送装置500的剖视图。图8b示出了接近旋转/部署程序结束的输送装置500的部分剖视图。一旦凸轮筒515旋转直到凸轮从动件535达到凹槽530的端部(在位置543),轴驱动器本体565位于凸轮筒515的远侧端部附近且较接近鞘驱动器本体570,其已经朝凸轮筒515的近侧端部移动(较接近轴驱动器本体565)。
56.图9示出了接近旋转/部署程序结束的输送装置500的透视图,其中主本体505处于剖视图。如图所示,凸轮从动件550处于其倒数第二位置544a。凸轮从动件550被防止移动至端部位置544b,直到端盖510被促动以允许凸轮筒515进一步旋转。端盖510还作用为可促动的筒部分,在被促动时,可促动的筒510在凸轮从动件550已经达到位置544a之后防止或允许凸轮筒515进一步旋转。可促动的筒和其相关构件的更多论述将在下文提供。
57.当凸轮从动件550朝凸轮筒515的近侧端部移动时,凸轮从动件550还引起鞘驱动器本体向近侧平移且从而将刚性地附接的鞘425朝凸轮筒515的近侧端部拉动。当鞘425被拉回凸轮筒515的本体中时,可植入装置100的一部分(例如,连接部件110a)在鞘425的端部处露出。然而,如提到的那样,一旦凸轮从动件535达到倒数第二位置544a,凸轮筒515被锁定且凸轮从动件550不可移动至凹槽540的端部位置544b,直到可促动的筒510被促动以释放凸轮筒515且允许其进一步旋转。凸轮从动件550在倒数第二位置544a至位置544b之间的该最终移动引起鞘425进一步缩回到凸轮筒515的内腔中,且从而露出轴460的抓取部分450(见图4f
‑
h)。一旦抓取部分450露出,则可植入装置450从输送装置500自由化且释放。
58.图10a
‑
10n绘出了根据本公开的一些实施例的在部署步骤期间的输送装置500的各种构件的位置和移动。用于可植入装置100的部署过程的起始由图10a示出,其中凸轮从动件535和轴驱动器本体565处于起始/默认位置。在凸轮筒515的远侧端部,鞘驱动器本体570在凸轮筒515的远侧端部附近。轴驱动器本体565和鞘驱动器本体570在该阶段最远离彼此。延伸出适配器轴523(见图5a)的端部的是鞘425,其从凸轮筒515的内腔内的鞘驱动器本
体570延伸至超过适配器轴523的离开开口。图10b绘出了处于初始构造的鞘425,在可植入装置100的部署之前。这里,可植入装置100完全嵌入到鞘425内。
59.图10c示出了部署的第一阶段,其中环部件105a盘旋或自旋出鞘425(见图10d)。如图10c中所示,轴驱动器本体525和凸轮从动件535已经移动至1005处的新位置。这通过旋转凸轮筒515引起,其可通过旋转旋钮520(未示出,见图5a)完成。当凸轮筒515旋转时,凸轮从动件535沿凹槽530横穿且从而引起轴驱动器本体565对应地旋转和平移。轴驱动器本体565的旋转和平移引起轴460旋转和平移,其继而又引起可植入装置100的环部件105a旋转和平移出鞘425(图10d)。凸轮筒515的旋转还引起凸轮从动件550同时在凸轮筒515的远侧端部处的凹槽540内移动。
60.图10c和图10e的位置之间,凸轮从动件535在凹槽530的径向部分内移动。在横穿径向部分期间,轴驱动器本体565位于凹槽530的径向部分中以维持其轴向位置(即,没有任何轴向平移)。同时,凸轮从动件550在凹槽530的螺旋部分内朝凸轮筒515的近侧端部移动。这引起凸轮从动件550朝输送装置500的近侧端部推动鞘驱动器本体,且继而将鞘425缩回到凸轮筒515的本体中。图10f示出了鞘425向近侧缩回时露出连接部件110a。
61.图10g示出了第二环部件105b被推出鞘425(见图10h)。如图10g中所示,轴驱动器本体565和凸轮从动件535已经移动至新位置1010。在位置1005和1010之间转变期间,第二环部件105b部署到患者的尿道中,如图10h中所绘。当凸轮从动件535在位置1005和1010之间横穿时,凸轮从动件550同时横穿凹槽540的径向槽口。该移动有零轴向分量,其从而引起鞘驱动器本体570仍沿近侧静止。
62.在图10g和图10i之间,凸轮从动件535横穿径向槽口部分(由凸轮从动件535和轴驱动器本体525阻挡而看不到)。凹槽530的径向槽口部分(被阻挡而看不到)类似于径向槽口1050,其是在图10c和图10e之间的之前径向转变的径向槽口。同时,凸轮从动件550横穿凹槽540的螺旋槽口,如由箭头1015所示。该移动具有轴向分量且因此引起鞘驱动器本体570沿近侧方向缩回(朝轴驱动器本体525)。鞘425的额外缩回还露出可植入装置100的连接部件110b(见图10j)。
63.图10i和图10k之间,当凸轮从动件535横穿凹槽530的最末螺旋部分时,第三环部件105c推出。图10l示出处于部署位置的环部件105c。
64.图10k和图10m绘出了可植入装置100的部署的最末阶段。在该阶段期间,凸轮从动件535横穿凹槽530的径向槽口从倒数第二位置542至端部位置543(未示出,见图6a)。同时,凸轮从动件550横穿凹槽540的螺旋槽口从倒数第二位置544a至端部位置544b。在输送装置500的初始设定,凸轮从动件535和570两者被防止从其相应倒数第二位置横穿至端部位置,由于凸轮筒515被位于凸轮筒515的近侧端部处的锁定机构锁定。
65.在一些实施例中,输送装置500不包括凹槽530,且仅存在螺旋凹槽540。在该实施例中,可植入装置100不需要自旋(推)出鞘425。相反,部署程序仅涉及缩回鞘425以缓慢地露出包含在鞘425内的可植入装置100(其在图10n中部分示出)。
66.图10k、图11、图12a
‑
c和图13将一起描述来进一步示出锁定机构。图11绘出了根据本公开的一些实施例的凸轮筒515。图12a和图12b绘出了锁定机构的各种内部构件,且图13绘出了根据本公开的一些实施例的输送装置500的截面。锁定机构包括在凸轮筒515的近侧端部处的第三凹槽1105(见图11)、端盖510、凸轮从动件1055(见图10k)、和锁定套筒1205
(见图12a)。如图11中所示,凸轮筒515包括凹槽1105,其在凸轮筒515由旋钮520旋转时沿锁定套筒1205驱动凸轮从动件1055。在可植入装置100的部署和凸轮筒515的顺时针旋转时,锁定套筒1205朝凸轮筒515的近侧端部移动。一旦凸轮从动件535和550达到其相应倒数第二位置,锁定套筒1205的缺口1215接合销1210(见图12b),其刚性地附接至可促动的端盖510。这可防止可植入装置100的意外部署。一旦凸轮筒515被允许进一步旋转,凸轮从动件550将移动至端部位置544b。这将引起鞘425使轴460的抓取部分450缩回且露出。抓取部分的露出将使可植入装置100的端部部件210从鞘425的限制自由化(见图10n)。当可植入装置100从抓取部分450释放,这有效地结束部署程序。
67.图12d
‑
12i是可植入装置100的部署进程期间的锁定机构的透视和半透明视图。图12d、12e和12f分别与如图10a、10b和10c中所绘出的部署进程相对应。图12g、12h和12i分别与如图10a、10b和10c中所绘出的部署进程相对应。图12h和12i还分别与如图12b和12c中所绘出的部署进程相对应。
68.图12j是根据本公开的一些实施例的锁定机构的剖视图。在一些实施例中,端盖510可促动,因为销1235可沿凸轮筒515的纵向轴线移动。在初始设定(也是默认设定),销1235朝凸轮筒515的远侧端部偏置(见图12a和12b)。在部署期间,凸轮从动件1055经由螺旋路径1105近侧地移动,直达其达到倒数第二锁定位置。端盖510的l形槽口设计成轴向地接收销1235和锁定套筒1205。端盖510的槽口的轴向长度越长,则凸轮筒515在锁定套筒的缺口1215接合销1210之前旋转得越远。
69.图12b示出了在凸轮从动件535和550处于其倒数第二位置时,套筒1205和缺口1215相对于销1210的位置。如图所示,销1210接合缺口1215,这防止凸轮筒515进一步旋转,因为凸轮从动件1055刚性地附连至套筒1205。再次,这可防止可植入装置100的意外释放,直到端盖510通过将端盖手柄1230朝近侧方向推(或拉)来促动。
70.图12c示出了端盖510被促动且完成最终旋转(释放)的时候。如图所示,销1210由用户朝端盖510的远侧端部拉。由于销1210不再防止凸轮旋转,凸轮筒515可进一步旋转(顺时针),其将凸轮从动件1055移动至端盖510的l形槽口的径向端部。在许多实施例中,这结束可植入装置的部署程序。
71.图14示出了根据本公开的一些实施例的完全组装的输送装置500的透视图。如图所示,输送装置500包括排泄组件1405,以用于在可植入装置100的部署期间排泄尿道内的流体。组件1405还可用于在程序期间清洗或增加流体。
72.图15示出了根据本公开的一些实施例的用于部署可植入装置(例如,可植入装置100)的过程1500。过程1500可在1505处开始,其中包含可植入装置100的鞘(例如,鞘 425)插入患者的尿道中。在1510处,为了部署可植入装置,输送装置(例如,输送装置500)的凸轮被旋转。这可例如通过转动输送装置500的旋钮(例如,旋钮500)来完成。备选地,输送装置500的凸轮筒(例如,凸轮筒515)可直接地被旋转。在1515处,鞘 425被向后驱动,这引起鞘425缩回到输送装置500的本体中。当鞘 425被缓慢缩回时,可植入装置100缓慢露出且部署在尿道内。一旦可植入装置100完全部署和释放,鞘425在1520处从患者的身体移除。
73.图16示出了根据本公开的一些实施例的用于缩回鞘425且用于盘旋出可植入装置100的过程1600。过程1600在1605处开始,其中第一凸轮从动件(例如,凸轮从动件535或550)在第一凹槽(例如,凹槽530或540)内移动(旋转和/或平移)。在一些实施例中,第一凸
轮从动件被约束成仅沿轴向方向移动。这可使用平行于输送装置的主本体(例如,主本体505或凸轮筒515)的纵向轴线设置的槽口实现。带有纵向槽口的抗旋转套筒还可用于约束凸轮从动件的移动。在1610处,当第一凸轮从动件(例如,凸轮从动件535)在第一凹槽内移动时,第二凸轮从动件(例如,凸轮从动件550)也同时在第二凹槽内移动。在一些实施例中,当第一凸轮从动件在第一凹槽的螺旋槽口部分内移动时,第二凸轮从动件同时在第二凹槽的径向槽口部分内移动。此外,当第一凸轮从动件在第一凹槽的径向槽口部分内移动时,第二凸轮从动件同时在第二凹槽的螺旋槽口部分内移动。以此方式,两个凸轮从动件535和550的移动不需要在任何时间点相同。这允许两个主要类型的协同移动。第一类型是,当第一凸轮从动件沿远侧方向推轴425时,同时第二凸轮从动件保持鞘425轴向地静止。第二类型是,当第一凸轮从动件保持轴425轴向地静止时,同时第二凸轮从动件沿近侧方向缩回鞘425。
74.在某些情形下,可期望在装置100被完全从抓取器450释放之前,将可植入装置100返回至其在鞘425内的容纳位置。例如,如果医疗专业人员将可植入装置100的部分部署定位或位置不视作最佳或另外期望,则可植入装置100可通过以相反顺序执行如本文中描述(例如,相对于图4a
‑
4e和10a
‑
10n)的部署程序的一个或多个步骤而部分或完全缩回到鞘425中(或鞘425可在装置100上方前移,或两种移动的组合)。例如,运行来从鞘425的开放远侧端部露出装置100的一部分(例如,第一环105的一部分、第一环105和连接部件110的一部分、多个环105和中间的连接部件110等)的各个部署步骤可相反地执行,其中运行的步骤的总体顺序也相反地执行。例如,如果输送实施例构造成使得凸轮筒515(或旋钮520)沿第一(例如,逆时针)方向的旋转引起可植入装置100的一部分离开鞘425的开放远侧端部,则凸轮筒515(或旋钮520)沿第二相反(例如,顺时针)方向的旋转引起可植入装置100的露出的部分返回至鞘425内的容纳位置且从而恢复可植入装置100。输送装置500然后可重新定位(例如,不从身体移除)且输送程序可重新开始。该过程可重复,直到实现最佳或期望的放置,在该点处,可植入装置100可完全释放且从输送装置500分离。
75.应注意的是,相对于本文提供的任何实施例描述的所有特征、元件、构件、功能和步骤意图可自由组合且可利用不同于任何其它实施例的那些替换。如果某些特征、元件、构件、功能或步骤相对于仅一个实施例描述,则应当理解的是,该特征、元件、构件、功能或步骤可结合本文描述的每个其它实施例使用,除非另外明确陈述。本段因此用作针对引入权利要求的先行基础和书面支撑,在任何时间,权利要求从不同实施例组合特征、元件、构件、功能和步骤,或将来自一个实施例的特征、元件、构件、功能和步骤利用另一个实施例的那些替换,即使以下描述在具体情况下不明确陈述此组合或替换是可能的。明确知道每个可能组合和替换的明确表述是过于麻烦的,尤其给定允许各个和每个此组合和替换将由本领域普通技术人员容易了解。
76.在许多情况下,实体在本文中描述为联接至其它实体。应当理解的是,用语“联接”和“连接”(或其任何形式)在本文中可互换地使用,且在两种情况下,通用于两个实体的直接联接(没有任何不可忽略的中间实体)和两个实体的间接联接(带有一个或多个不可忽略的中间实体)。在实体示出为直接联接在一起或描述为联接在一起而没有描述任何中间实体的情况下,则应理解的是,那些实体也可间接联接在一起,除非上下文明确另外指出。
77.如本文和所附权利要求中使用的那样,单数形式“一个”、“一种”和“该”包括复数
参照,除非上下文另外清楚地指出。
78.本文提供的示例和实施例提供成说明性目的,且不意图限制本文描述的应用或权利要求。将理解的是,本文公开的特定实施例和本文描述的系统、构件、方法等不需要采取描述的特定形式,而是可替代地以与本公开和权利要求一致的各种不同或额外方式应用。还将理解的是,本公开不需要采取本文明确描述的特定形式,且本公开意图例如包括与所附权利要求和本公开一致的其改变和变型,以优化本文描述的主题。公开的主题不限于本文描述的任何单个或特定实施例,而是应当以根据所附权利要求的宽度和范围解释。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。