1.本实用新型涉及天然气计量管维护技术领域,尤其是涉及一种天然气计量直管段自动清洗机器人。
背景技术:
2.超声波流量计是通过检测流体流动对超声束(或超声脉冲)的作用以测量流量的仪表,超声波流量计为重要的输气计量设备,每千分之一的误差都关系着上千万的经济利润,不仅如此,流量计直管段脏污,极易造成流量计探头故障,引起计量偏差过大。
3.计量直管段脏污是造成流量计剖面系数超标的一个重要因素,计量直管段中日积月累形成的凝析油、杂质以及阀门维护保养残留的润滑脂等,都将影响介质流态,更严重的会改变管道内径形状,造成超声流量计探头脏污损坏,且计量直管段大多要通过人工清洁的方式对整体内部的污渍进行去除。
4.上述中的现有技术方案存在以下缺陷:传统的人工清理方式只能够清除管口附近污物,且效果差,同时的人工清理方式较为耗时耗力,增加了整体的清洁难度,且降低了整体的清洁效率。
技术实现要素:
5.本实用新型的目的是提供一种方便安装的移动清洁式天然气计量直管段自动清洗机器人。
6.为实现上述目的,本实用新型提供了如下技术方案:
7.一种天然气计量直管段自动清洗机器人,包括机器人本体,所述机器人本体内部包括有检测整体碰壁情况的碰壁检测机构,所述碰壁检测机构内部包括有接线盒,所述接线盒一端固定连接有安装轴,所述安装轴外侧固定连接有定位块,所述定位块远离碰壁检测机构的一端固定连接有压力弹簧,所述压力弹簧远离定位块的一端固定连接有压紧块,所述压力弹簧位于安装轴外侧,所述安装轴远离碰壁检测机构的一端固定安装有用于清洁管道的旋转清洁机构,所述旋转清洁机构内部包括有齿轮箱,所述安装轴外侧活动连接有调节骨架,所述调节骨架远离安装轴的一端铰接连接有用于带动整体移动的移动机构,所述移动机构内部包括有定位架体。
8.通过采用上述技术方案,使用移动机构带动整体进行横向移动,并通过旋转清洁机构带动毛刷进行转动对管道内部进行充分的清洁,保证整体良好的移动清洁效果。
9.进一步地,所述调节骨架内部包括有活动连接有在安装轴外侧的第一活动安装块和第二活动安装块,所述第一活动安装块和第二活动安装块外侧分别铰接连接有第一连杆和第二连杆,所述第一活动安装块与压紧块固定连接,所述调节骨架包括有活动连接有在安装轴外侧的第一活动节点和第二活动节点,所述第一活动节点位于第一活动安装块和第二活动安装块之间,所述第二活动节点位于齿轮箱和第二活动安装块之间,所述第一活动节点外侧铰接连接有第三连杆,所述第三连杆与第一连杆铰接连接,所述,所述第二活动节
点外侧铰接连接有第四连杆,所述第四连杆与第二连杆铰接连接,所述第三连杆与第四连杆均与定位架体铰接连接。
10.通过采用上述技术方案,使用第一连杆、第二连杆、第三连杆与第四连杆相互之间的挤压力,从而方便压力弹簧带动移动机构与管道内壁进行贴合,保证整体适用于多种规格的管道,从而方便整体进行移动清洁。
11.进一步地,所述第一连杆、第二连杆、第三连杆与第四连杆对应分布,所述第一连杆、第二连杆、第三连杆与第四连杆关于安装轴圆心线环形等间距分布有三组。
12.通过采用上述技术方案,第一连杆、第二连杆、第三连杆与第四连杆相互之间移动产生的挤压力,从而保证移动机构与管道内壁进行充分的贴合,保证整体移动时良好的稳定性。
13.进一步地,所述齿轮箱靠近安装轴的一面固定连接有第一驱动电机,所述第一驱动电机输出端穿过齿轮箱外侧延伸至齿轮箱内部,所述第一驱动电机输出端固定连接有主动齿轮,所述主动齿轮外侧啮合连接有从动齿轮,所述从动齿轮远离第一驱动电机的一端固定连接有定位轴,所述定位轴穿过齿轮箱内壁延伸至齿轮箱外侧,所述定位轴外侧固定连接有毛刷辊。
14.通过采用上述技术方案,第一驱动电机带动主动齿轮进行转动,且主动齿轮转动的过程中带动从动齿轮进行转动,从而保证整体带动毛刷进行旋转,对管道内壁进行充分的清洁,保证整体良好的清洁效果。
15.进一步地,所述主动齿轮与从动齿轮相适配,所述从动齿轮与毛刷辊的圆心线重叠,所述毛刷辊为外侧带环形等间距分布毛刷的结构。
16.通过采用上述技术方案,外侧带环形等间距分布毛刷结构的毛刷辊可以方便整体对管道内部进行充分的清洁,保证整体良好的清洁效果,增加了整体的实用性。
17.进一步地,所述定位架体外侧固定连接有第二驱动电机,所述第二驱动电机活动端固定连接有第一斜齿轮,所述第一斜齿轮外侧啮合连接有第二斜齿轮,所述第二斜齿轮一端固定连接有连接轴,所述连接轴穿过定位架体外侧延伸至定位架体内部,所述连接轴与定位架体转动连接,所述连接轴外侧固定连接有主动轮,所述定位架体内部转动连接有从动轮,所述主动轮与从动轮外侧活动连接有皮带。
18.通过采用上述技术方案,通过第二驱动电机带动主动轮进行转动,且主动轮通过皮带带动从动轮进行转动,方便整体在管道内部进行移动,以便于整体进行移动清洁。
19.进一步地,所述定位架体关于安装轴圆心线环形等间距分布有三组,所述定位架体内部主动轮与从动轮规格一致,所述主动轮与从动轮均与皮带相适配。
20.通过采用上述技术方案,关于安装轴圆心线环形等间距分布有三组的定位架体保证整体和管道内部进行充分的贴合,从而保证整体在管道内部稳定的移动。
21.综上所述,本实用新型的有益技术效果为:
22.1、采用了旋转清洁机构和移动机构,通过驱动电机带动皮带进行运转在管道内部进行横向硬,同时驱动电机带动毛刷辊进行转动,从而方便整体在移动的过程中对管道内部进行清洁,产生高效率清洁的效果;
23.2、采用了毛刷辊与旋转清洁机构,保证毛刷辊外表面与管道内表面贴合的情况下,通过驱动电机带动毛刷辊进行转动,从而对管道内壁进行充分的清洁,产生充分旋转清
洁的效果;
24.3、采用了调节骨架和压力弹簧,通过压力弹簧带动调节骨架内部的支点进行移动,从而保证连杆的相对角度发生变化,以便于皮带与管道内壁进行调节,从而保证整体横向移动过程中的稳定性,产生稳定清洁的效果。
附图说明
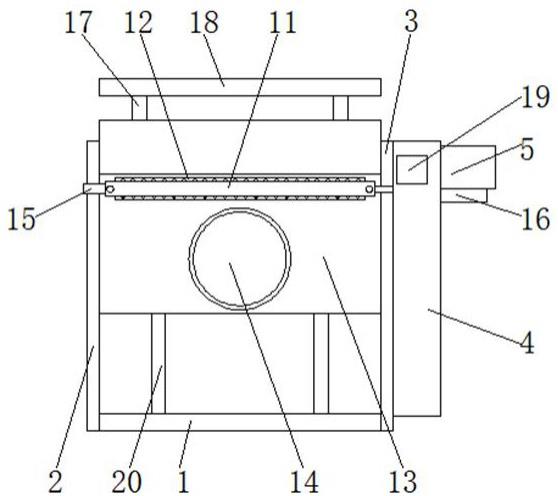
25.图1为本实用新型加工状态结构示意图;
26.图2为本实用新型立体结构示意图;
27.图3为本实用新型调节骨架分布结构示意图;
28.图4为本实用新型旋转清洁机构内部结构示意图。
29.图中,1、机器人本体;2、碰壁检测机构;3、定位块;4、压力弹簧;5、旋转清洁机构;6、调节骨架;7、移动机构;8、压紧块; 21、接线盒;22、安装轴;51、齿轮箱;52、第一驱动电机;53、主动齿轮;54、从动齿轮;55、定位轴;56、毛刷辊;61、第一活动安装块;62、第二活动安装块;63、第一连杆;64、第二连杆;65、第一活动节点;66、第三连杆;67、第四连杆;68、第二活动节点;71、定位架体;72、第二驱动电机;73、第一斜齿轮;74、第二斜齿轮; 75、连接轴;76、主动轮;77、从动轮;78、皮带。
具体实施方式
30.以下结合附图对本实用新型作进一步详细说明。
31.参照图1和图2,一种天然气计量直管段自动清洗机器人,包括机器人本体1,机器人本体1内部包括有检测整体碰壁情况的碰壁检测机构2,碰壁检测机构2内部包括有接线盒21,碰壁检测机构2外侧为带碰壁传感器结构,与普通的接触传感报警结构相同,且不为本设计重点,所以不多做描述,接线盒21一端固定连接有安装轴22,安装轴22外侧固定连接有定位块3,定位块3远离碰壁检测机构2 的一端固定连接有压力弹簧4,压力弹簧4远离定位块3的一端固定连接有压紧块8,压力弹簧4位于安装轴22外侧,安装轴22远离碰壁检测机构2的一端固定安装有用于清洁管道的旋转清洁机构5,旋转清洁机构5内部包括有齿轮箱51,安装轴22外侧活动连接有调节骨架6,调节骨架6远离安装轴22的一端铰接连接有用于带动整体移动的移动机构7,移动机构7内部包括有定位架体71,压力弹簧4 与压紧块8的水平中心线重叠,从而方便带动移动机构7与管道内壁进行贴合,保证整体良好的移动清洁效果。
32.参照图3,调节骨架6内部包括有活动连接有在安装轴22外侧的第一活动安装块61和第二活动安装块62,第一活动安装块61和第二活动安装块62外侧分别铰接连接有第一连杆63和第二连杆64,第一活动安装块61与压紧块8固定连接,调节骨架6包括有活动连接有在安装轴22外侧的第一活动节点65和第二活动节点68,第一活动节点65位于第一活动安装块61和第二活动安装块62之间,第二活动节点68位于齿轮箱51和第二活动安装块62之间,第一活动节点65外侧铰接连接有第三连杆66,第三连杆66与第一连杆63铰接连接,第二活动节点68外侧铰接连接有第四连杆67,第四连杆67 与第二连杆64铰接连接,第三连杆66与第四连杆67均与定位架体 71铰接连接,第一连杆63和第二连杆64结构相同,且第三连杆66 与第四连杆67结构相同,保证整体可以施加压力,从而保证移动机构7与管道内壁进行贴
合,第一连杆63、第二连杆64、第三连杆66 与第四连杆67对应分布,第一连杆63、第二连杆64、第三连杆66 与第四连杆67关于安装轴22圆心线环形等间距分布有三组,关于安装轴22圆心线环形等间距分布有三组的第一连杆63、第二连杆64、第三连杆66与第四连杆67可以保证整体对多组移动机构7压紧与管道进行贴合,从而保证整体的移动清洁效果,定位架体71外侧固定连接有第二驱动电机72,第二驱动电机72活动端固定连接有第一斜齿轮73,第一斜齿轮73外侧啮合连接有第二斜齿轮74,第二斜齿轮 74一端固定连接有连接轴75,连接轴75穿过定位架体71外侧延伸至定位架体71内部,连接轴75与定位架体71转动连接,连接轴75 外侧固定连接有主动轮76,定位架体71内部转动连接有从动轮77,主动轮76与从动轮77外侧活动连接有皮带78,第一斜齿轮73与第二斜齿轮74相适配,从而方便整体带动传送带进行运行,方便整体在管道内部进行横向移动,保证整体对管道内部进行充分的清洁,定位架体71关于安装轴22圆心线环形等间距分布有三组,定位架体 71内部主动轮76与从动轮77规格一致,主动轮76与从动轮77均与皮带78相适配,保证整体良好的移动稳定性,从而方便整体进行移动清洁。
33.参照图4,齿轮箱51靠近安装轴22的一面固定连接有第一驱动电机52,第一驱动电机52输出端穿过齿轮箱51外侧延伸至齿轮箱 51内部,第一驱动电机52输出端固定连接有主动齿轮53,主动齿轮 53外侧啮合连接有从动齿轮54,从动齿轮54远离第一驱动电机52 的一端固定连接有定位轴55,定位轴55穿过齿轮箱51内壁延伸至齿轮箱51外侧,定位轴55外侧固定连接有毛刷辊56,毛刷辊56外侧可以和管道内壁进行充分的贴合,从而保证整体良好的安装效果,增加了整体实用性,主动齿轮53与从动齿轮54相适配,从动齿轮 54与毛刷辊56的圆心线重叠,毛刷辊56为外侧带环形等间距分布毛刷的结构,外侧带环形等间距分布毛刷的毛刷辊56方便整体对管道内部进行旋转清洁,降低了整体清洁需要的人力消耗,方便整体进行快速清洁。
34.本实施例的实施原理为:首先将机器人本体1放入天然气计量管内部,同时压力弹簧4带动压紧块8进行移动,且压紧块8移动的过程中带动第一活动安装块61进行移动,从而保证第一活动安装块61、第二活动安装块62、第一活动节点65和第二活动节点68外侧的第一连杆63、第二连杆64、第三连杆66和第四连杆67联动,从而推动移动机构7中的皮带78与管道内壁进行贴合,同时旋转清洁机构 5内部的第一驱动电机52带动主动齿轮53进行转动,且主动齿轮53 转动的过程中带动从动齿轮54和毛刷辊56进行旋转,从而对天然气计量管内壁进行充分的清洁,同时整体旋转清洁的过程中,第二驱动电机72带动第一斜齿轮73进行转动,且第一斜齿轮73转动的过程中带动第二斜齿轮74和连接轴75进行旋转,以保证整体带动主动轮 76和从动轮77进行转动,从而使整体可以在管道内部进行移动清洁,增加了整体的清洁效果。
35.本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。