1.本发明属于的超声电机领域;具体涉及一种压电驱动三闭环控制系统及其控制方法。
背景技术:
2.超声电机作为一种新型微特电机,具有体积小、质量轻、控制精度高、运行无噪声等优势,适用于微机电系统、医疗设备以及精确定位控制等领域。传统电磁电机为了达到精准控制,一般采用三环驱动控制,包括位置环、速度环与电流环。由于超声电机自身工作原理的特殊性(基于逆压电效应产生超声振动,再通过摩擦耦合转化为动子的输出运动),难以对超声电机进行精确建模,因此目前关于超声电机的压电驱动三闭环控制方法研究尚少,实现压电驱动三闭环控制系统及方法的研究,对于实现压电驱动控制技术领域的精准控制具有关键意义。
技术实现要素:
3.本发明提供了一种压电驱动三闭环控制系统及其控制方法,本发明为了解决由于超声电机自身工作原理难以进行精确建模,未能实现压电精准控制的问题。
4.本发明通过以下技术方案实现:
5.一种压电驱动三闭环控制系统,所述控制系统包括位置pi控制器、速度pi控制器、驱动力观测器、非线性辨识模型、电压pid控制器、驱动器、电压传感器、控制电压观测器、超声电机、速度传感器和位移传感器;所述电压pid控制器、驱动器、电压传感器和控制电压观测器组成电压环路;
6.所述速度pi控制器、驱动力观测器、非线性辨识模型、电压pid控制器、驱动器、电压传感器、控制电压观测器、超声电机和速度传感器组成速度环;
7.所述位置pi控制器、速度pi控制器、驱动力观测器、非线性辨识模型、电压pid控制器、驱动器、电压传感器、控制电压观测器、超声电机和位移传感器组成速度环。
8.一种压电驱动三闭环控制系统的控制方法,所述控制方法包括以下步骤:
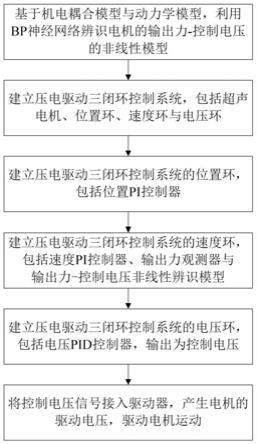
9.步骤1:基于电机的机电耦合模型与动力学模型,利用bp神经网络辨识电机的输出力—控制电压的非线性模型;
10.步骤2:基于步骤1电压的非线性模型建立压电驱动三闭环控制系统;
11.步骤3:基于步骤2的压电驱动三闭环控制系统建立位置环,包括位置pi控制器;
12.步骤4:基于步骤2的压电驱动三闭环控制系统建立速度环,包括速度pi控制器、输出力观测器与步骤1中的输出力—控制电压的非线性辨识模型;
13.步骤5:基于步骤2的压电驱动三闭环控制系统建立电压环,包括电压pid控制器;
14.步骤6:将控制电压信号接入驱动器,产生电机的驱动电压,驱动电机运动。
15.进一步的,所述步骤1基于电机的机电耦合模型与动力学模型具体为,电机的两相驱动电压ua,ub与输出力f
t
满足
[0016][0017]
其中ε=1/2ωη
tbb1bl1
,a2=η
tbb1
μ
slide
ζ1c
p
,a3=b
l1
(k
b-ω2mb), a4=η
tbb1
μ
slide
ζ1,
[0018]
ya=ψa(ua),yb=ψb(ub);ω=2πf,f为驱动电压频率,η
t
为力耦合系数,b
l1
与b
b1
为超声电机纵弯模态的机电耦合系数,mb与kb分别为电机弯振模态的等效质量与刚度,c
p
为超声电机定子的等效电容,μ
slide
为动子导轨的滑动摩擦系数,ζ1与ζ2是与振型函数有关的系数值,f
p
为所施加预紧力,mr为动子质量,g为重力加速度,电机导纳ya,yb与驱动电压ua,ub有关,非线性关系ψa与ψb通过最小二乘辨识法辨识得到。
[0019]
进一步的,所述步骤1电机输出力—控制电压非线性模型为
[0020]ucr
=φ(f
t
),
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0021]
其中φ为非线性关系;利用bp神经网络来辨识φ,f
t
为输入值x1,即x1=f
t
,隐藏层神经节点数为4,输出o1与o2分别为两相驱动电压ua,ub,即o1=ua,o2=ub,进而输出控制电压u
cr
;控制电压与bp神经网络的输出ua,ub之间满足u
cr
=k
ca
ua k
cb
ub,k
ca
与k
cb
为所采用驱动器的拓扑系数;神经网络隐藏层与输出层的激活函数均为tanh函数。
[0022]
进一步的,所述步骤3具体为,压电驱动三闭环控制系统最外层为位置环,将位移传感器采集的电机实时位移值x与给定位置值xr作差,得到位移偏差e
x
;再将位移偏差e
x
作为位置pi控制器的输入,输出为参考速度值v
x
;位置pi控制器的传递函数为
[0023][0024]
其中k
px
与k
ix
分别表示位置环pi控制器的比例参数与积分参数。
[0025]
进一步的,所述步骤4具体为,所述压电驱动三闭环控制系统第二层为速度环,将速度传感器采集的电机实时速度值v与步骤3得到的v
x
作差,得到速度偏差ev;将速度偏差 ev作为速度pi控制器的输入,输出为给定速度值vr。速度pi控制器的传递函数为,
[0026][0027]
式中k
pv
与k
iv
分别表示速度环pi控制器的比例参数与积分参数;
[0028]
将vr输入输出力观测器表示为,
[0029][0030]
计算出对应输出力f
t
;其中mr与cr分别为超声电机动子的质量与阻尼系数,ω=2πf,f 为驱动电压频率。将输出力f
t
代入步骤1所得到的输出力-控制电压的非线性辨识模型(2),解算出给定控制电压u
cr
。
[0031]
进一步的,所述步骤5具体为,所述压电驱动三闭环控制系统第三层为电压环,电压传感器采集实时两相驱动电压值ua与ub,再输入控制电压观测器uc=k
ca
ua k
cb
ub,计算出
实时控制电压uc,k
ca
与k
cb
为所采用驱动器的拓扑系数,与步骤1中相同。
[0032]
进一步的,所述压电驱动三闭环控制系统中的超声电机等效电路的电流ia流经电阻 r
ma
、电感l
ma
、电容c
da
和电容c
pa
后接地;
[0033]
所述压电驱动三闭环控制系统中的超声电机等效电路的电流ib流经电阻r
mb
、电感 l
mb
、电容c
db
和电容c
pb
后接地。
[0034]
进一步的,所述等效电路中ia与ib分别为电机的两相驱动电流,c
da
与c
db
为两相静态电容,r
ma
与r
mb
为两相动态电阻,l
ma
与l
mb
为两相动态电感,c
pa
与c
pb
为两相动态电容;将步骤4计算的u
cr
与实时控制电压uc作差,得到控制电压偏差值eu;将eu输入电压pid 控制器得到控制电压值ud;电压pid控制器的传递函数为
[0035][0036]
其中k
pu
、k
iu
与k
du
分别表示电压环pid控制器的比例参数、积分参数与微分参数。
[0037]
本发明的有益效果是:
[0038]
本发明通过引入输出力观测器与输出力-控制电压的非线性辨识模型,实现了压电驱动三闭环控制,可以有效改善超声电机输出稳定性与系统动态响应,实现压电精准控制。
附图说明
[0039]
附图1是本发明的所述输出力—控制电压非线性辨识模型的bp神经网络示意图。
[0040]
附图2是本发明的所述压电驱动三闭环控制系统的整体框图
[0041]
附图3是本发明的所述压电驱动三闭环控制系统中的超声电机等效电路图。
[0042]
附图4是本发明的所述压电驱动三闭环控制系统的流程图。
具体实施方式
[0043]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0044]
一种压电驱动三闭环控制系统,所述控制系统包括位置pi控制器、速度pi控制器、驱动力观测器、非线性辨识模型、电压pid控制器、驱动器、电压传感器、控制电压观测器、超声电机、速度传感器和位移传感器;所述电压pid控制器、驱动器、电压传感器和控制电压观测器组成电压环路;
[0045]
所述速度pi控制器、驱动力观测器、非线性辨识模型、电压pid控制器、驱动器、电压传感器、控制电压观测器、超声电机和速度传感器组成速度环;
[0046]
所述位置pi控制器、速度pi控制器、驱动力观测器、非线性辨识模型、电压pid控制器、驱动器、电压传感器、控制电压观测器、超声电机和位移传感器组成速度环。
[0047]
一种压电驱动三闭环控制系统的控制方法,所述控制方法包括以下步骤:
[0048]
步骤1:基于电机的机电耦合模型与动力学模型,利用bp神经网络辨识电机的输出力—控制电压的非线性模型;
[0049]
步骤2:基于步骤1电压的非线性模型建立压电驱动三闭环控制系统;
[0050]
步骤3:基于步骤2的压电驱动三闭环控制系统建立位置环,包括位置pi控制器;
[0051]
步骤4:基于步骤2的压电驱动三闭环控制系统建立速度环,包括速度pi控制器、输出力观测器与步骤1中的输出力—控制电压的非线性辨识模型;
[0052]
步骤5:基于步骤2的压电驱动三闭环控制系统建立电压环,包括电压pid控制器;
[0053]
步骤6:将控制电压信号接入驱动器,产生电机的驱动电压,驱动电机运动。
[0054]
进一步的,所述步骤1基于电机的机电耦合模型与动力学模型具体为,电机的两相驱动电压ua,ub与输出力f
t
满足
[0055][0056]
其中ε=1/2ωη
tbb1bl1
,a2=η
tbb1
μ
slide
ζ1c
p
,a3=b
l1
(k
b-ω2mb),a4=η
tbb1
μ
slide
ζ1,
[0057]
ya=ψa(ua),yb=ψb(ub);ω=2πf,f为驱动电压频率,η
t
为力耦合系数,b
l1
与b
b1
为超声电机纵弯模态的机电耦合系数,mb与kb分别为电机弯振模态的等效质量与刚度,c
p
为超声电机定子的等效电容,μ
slide
为动子导轨的滑动摩擦系数,ζ1与ζ2是与振型函数有关的系数值,f
p
为所施加预紧力,mr为动子质量,g为重力加速度,上述参数均可由电机参数得到;电机导纳ya,yb与驱动电压ua,ub有关,非线性关系ψa与ψb通过最小二乘辨识法辨识得到。
[0058]
进一步的,所述步骤1电机输出力—控制电压非线性模型为
[0059]ucr
=φ(f
t
),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0060]
其中φ为非线性关系;利用图1所示的bp神经网络来辨识φ,f
t
为输入值x1,即x1=f
t
,隐藏层神经节点数为4,输出o1与o2分别为两相驱动电压ua,ub,即o1=ua,o2=ub,进而输出控制电压u
cr
;控制电压与bp神经网络的输出ua,ub之间满足u
cr
=k
ca
ua k
cb
ub,k
ca
与k
cb
为所采用驱动器的拓扑系数;神经网络隐藏层与输出层的激活函数均为tanh函数;
[0061]
利用公式(1)通过软件仿真获取300组真实输出力f
rt
与对应真实驱动电压u
ra
,u
rb
的数据集,作为图1所示的bp神经网络的训练集;采用梯度下降法对图1所示的bp神经网络进行训练,学习率为10-3
,成本函数为直至成本函数小于10-5
停止训练,从而得到输出力-控制电压的准确非线性辨识模型。
[0062]
进一步的,所述步骤3具体为,压电驱动三闭环控制系统最外层为位置环,将位移传感器采集的电机实时位移值x与给定位置值xr作差,得到位移偏差e
x
;再将位移偏差e
x
作为位置pi控制器的输入,输出为参考速度值v
x
;位置pi控制器的传递函数为
[0063][0064]
其中k
px
与k
ix
分别表示位置环pi控制器的比例参数与积分参数。
[0065]
进一步的,所述步骤4具体为,所述压电驱动三闭环控制系统第二层为速度环,将
速度传感器采集的电机实时速度值v与步骤3得到的v
x
作差,得到速度偏差ev;将速度偏差 ev作为速度pi控制器的输入,输出为给定速度值vr。速度pi控制器的传递函数为,
[0066][0067]
式中k
pv
与k
iv
分别表示速度环pi控制器的比例参数与积分参数;
[0068]
将vr输入输出力观测器表示为,
[0069][0070]
计算出对应输出力f
t
;其中mr与cr分别为超声电机动子的质量与阻尼系数,ω=2πf,f 为驱动电压频率。将输出力f
t
代入步骤1所得到的输出力-控制电压的非线性辨识模型(2),解算出给定控制电压u
cr
。
[0071]
进一步的,所述步骤5具体为,所述压电驱动三闭环控制系统第三层为电压环,电压传感器采集实时两相驱动电压值ua与ub,再输入控制电压观测器uc=k
ca
ua k
cb
ub,计算出实时控制电压uc,k
ca
与k
cb
为所采用驱动器的拓扑系数,与步骤1中相同。
[0072]
进一步的,所述压电驱动三闭环控制系统中的超声电机等效电路的电流ia流经电阻 r
ma
、电感l
ma
、电容c
da
和电容c
pa
后接地;
[0073]
所述压电驱动三闭环控制系统中的超声电机等效电路的电流ib流经电阻r
mb
、电感 l
mb
、电容c
db
和电容c
pb
后接地。
[0074]
进一步的,所述等效电路中ia与ib分别为电机的两相驱动电流,c
da
与c
db
为两相静态电容,r
ma
与r
mb
为两相动态电阻,l
ma
与l
mb
为两相动态电感,c
pa
与c
pb
为两相动态电容;将步骤4计算的u
cr
与实时控制电压uc作差,得到控制电压偏差值eu;将eu输入电压pid 控制器得到控制电压值ud;电压pid控制器的传递函数为
[0075][0076]
其中k
pu
、k
iu
与k
du
分别表示电压环pid控制器的比例参数、积分参数与微分参数。
[0077]
本发明引入不同电机速度下的输出力观测器与基于bp神经网络的输出力-控制电压非线性模型,完成电机速度与控制电压之间的关系表征;在此基础上设计了一个压电驱动三闭环控制系统及相应的控制器,最外层为位置环,然后依次是速度环与电压环。
[0078]
首先基于机电耦合模型与动力学模型,引入不同电机速度下的输出力观测器与利用 bp神经网络辨识电机的输出力-控制电压的非线性模型,完成电机速度与控制电压之间的关系表征;在此基础上设计了由位置环,速度环与电压环组成的压电驱动三闭环控制系统:位置环包括位置pi控制器;速度环包括速度pi控制器、输出力观测器与输出力-控制电压的非线性辨识模型;电压环包括电压pid控制器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。