1.本发明涉及到零件特征识别领域的特征提取方法,特别是一种用于神经网络的零件模型几何特征提取方法。
背景技术:
2.实体模型表示的行业标准是边界表示法(b-rep)。b-rep是一种多功能数据结构,由面、边和顶点组成,通过它们之间的拓扑关系粘合在一起。b-rep允许各种参数化曲线和曲面由cad建模操作来实现精确表示。零件设计人员通过软件直接与b-rep面、边和顶点交互,以选择、对齐和修改三维形状。为了利用cad软件中深度神经网络的最新进展,需要对b-rep数据进行适当的表示。
3.尽管b-rep数据在行业中广泛使用,但将b-rep数据和深层神经网络直接相结合的研究仍然有限。已有的方法是将b-rep数据预处理为经过充分研究的表示形式,如图像、体素、点云或三角形网格。离散化表示会丢失保真度,并且可能会丢失返回原始b-rep实体的关键映射。
技术实现要素:
4.针对背景技术中存在的问题,本发明提出一种用于神经网络的零件模型几何特征提取方法。
5.本发明的技术方案如下:
6.本发明包括以下步骤:
7.步骤一:根据零件模型文件的数据特点将零件模型的几何元素划分为多条线和多个面;
8.步骤二:对步骤一中划分后的多条线和多个面分别进行线和面的采样,分别获得多条线和多个面对应的各个离散点,对各个离散点进行特征参数计算后,分别获得多条线和多个面对应的几何特征,再根据线的几何特征将多条线划分为直线、圆弧、自由曲线,根据面的几何特征将多个面划分为平面、柱面、球面、自由曲面;
9.步骤三:根据自由曲线、自由曲面的各个离散点,对自由曲线、自由曲面进行插值计算和二次采样后,获得自由曲线和自由曲面的最终几何特征,从而获得零件模型中所有线和面的几何特征。
10.所述步骤二具体为:
11.s2.1:对零件模型中每条线进行一维采样,获得当前线的各个离散点,以当前线的各个离散点的坐标以及计算所得的单位切向量作为当前线的几何特征,遍历采样所有线,获得所有线的几何特征,根据各条线的几何特征将线划分为直线、圆弧和自由曲线;
12.s2.2:对零件模型中每个面进行二维采样,获得当前面的各个离散点,以当前面的各个离散点的坐标以及计算所得的单位法向量作为当前面的几何特征,遍历采样所有面,获得所有面的几何特征,根据各个面的几何特征将面划分为平面、柱面、球面和自由曲面。
13.所述s2.1中对零件模型中每条线一维采样,获得当前线的各个离散点,具体为:
14.对零件模型中每条线参数化后,实现当前线的参数域区间[m
min
,m
max
]到几何域的映射,其中的映射,其中表示一维实数,对参数化后的当前线进行均匀采样后,使得参数域区间[m
min
,m
max
]离散为一维网格,获得当前线的各个离散点,其中一维网格的采样步长的计算公式如下:
[0015][0016]
其中,δm为一维网格步长,m
min
为当前条线的参数域区间下界,m
max
为当前条线的参数域区间上界,m为当前条线的离散点数量。
[0017]
所述s2.2中对零件模型中每个面进行二维采样,获得当前面的各个离散点,具体为:
[0018]
对零件模型中每个面参数化后,实现当前面的二维参数域区间[s
min
,s
max
]
×
[t
min
,t
max
]到几何域的映射,其中,的映射,其中,表示二维实数,对当前面的二维参数域区间[s
min
,s
max
]
×
[t
min
,t
max
]分别进行水平向右方向和竖直向上方向上的均匀采样,使得二维参数域区间[s
min
,s
max
]
×
[t
min
,t
max
]离散为二维网格,获得当前面的各个离散点,其中二维网格中水平向右和竖直向上的采样步长的计算公式如下:
[0019][0020][0021]
其中,δs为二维网格中水平向右方向的采样步长,δt为二维网格中竖直向上方向的采样步长,s
min
、t
min
为二维参数域区间的两个下界,s
max
、t
max
为二维参数域区间的两个上界,q、p分别为当前面在水平方向和竖直方向上的离散点数量。
[0022]
所述步骤三具体为:
[0023]
s3.1:将每条自由曲线中任意两个相邻离散点相连后,求解由当前两个离散点所得区间的线性插值方程,根据线性插值方程求解获得当前两个离散点的插值曲线方程,计算公式如下:
[0024]flin
(s)=[f(sk)
·
(s
k 1-s) f(s
k 1
)
·
(s-sk)]/(s
k 1-sk)
[0025][0026]
q(s)=f
lin
(s-δs)-2f
lin
(s) f
lin
(s δs)
[0027]
其中,f
lin
(s)表示当前自由曲线d(s)在区间[sk,s
k 1
)的线性插值方程,s
min
<sk<s
max
且sk为第k个离散点ak的水平方向的坐标值,f(s)为自由曲线d(s)的插值曲线方程,s=sk α且α∈[0,δs),α表示水平方向的坐标值偏差参数,q(s)表示插值曲线方程的二阶小量;
[0028]
s3.2:求解插值曲线方程中切向量和线性插值方程所表示的线段相平行的点并作为插值点,将离散点的更新方向设置为水平方向,将水平方向坐标值最小的离散点的水平方向坐标值更新为插值点的水平方向坐标值,最后根据更新后的水平方向坐标值在零件模
型中进行二次采样,获得当前离散点竖直方向的坐标值,进行更新当前离散点的坐标以及单位切向量;
[0029]
s3.3:遍历当前自由曲线的剩余离散点,重复s3.1-s3.2,更新剩余离散点的坐标以及单位切向量,将当前自由曲线所有离散点的更新后的坐标以及单位切向量作为当前自由曲线的最终几何特征;
[0030]
s3.4:以0.5的概率将自由曲面的分割方向设置为水平方向或竖直方向,若选择水平方向,则以过离散点、法向量为竖直方向且水平向右方向的采样步长的多个平面将各个自由曲面进行曲面分割;若选择竖直方向,则以过离散点、法向量为水平方向且竖直向上方向的采样步长的多个平面将各个自由曲面进行曲面分割,获得各个自由曲面的多条分别处于相互平行平面内的自由曲线,将设置的分割方向作为对应的离散点的更新方向并重复s3.1-s3.3,对各个自由曲面中的多条自由曲线进行插值计算和二次采样,从而获得各个自由曲面的最终几何特征。
[0031]
本发明的有益效果为:
[0032]
本发明针对直线、圆弧、平面、柱面和球面使用均匀采样,对于自由曲线和自由曲面使用二次采样,兼顾了零件模型几何特征提取的效率和质量。
[0033]
本发明使用改进的线性插值方法生成自由曲线和自由曲面的新离散点以实现二次采样,充分利用三维模型的局部几何特征,提高了原有的神经网络模型泛化能力,使得自由曲线和自由曲面的识别结果更加可靠。
附图说明
[0034]
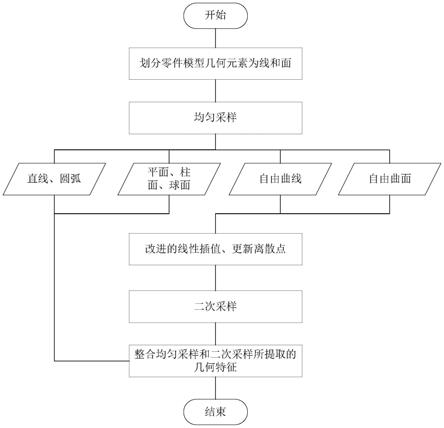
图1为本发明的零件模型几何特征提取实施流程图。
具体实施方式
[0035]
下面将结合实施例对本发明作详细、清晰的描述。
[0036]
如图1所示,本发明实施例及其实施过程包括如下:
[0037]
本发明包括以下步骤:
[0038]
步骤一:对零件模型建立三维直角坐标系,三维直角坐标系的x轴方向为水平向右,y轴方向为竖直向上,z轴方向由右手规则确定。根据零件模型文件的数据特点将零件模型的几何元素划分为多条线和多个面;
[0039]
步骤二:对步骤一中划分后的多条线和多个面分别进行线和面的采样,分别获得多条线和多个面对应的各个离散点,对各个离散点进行特征参数计算后,分别获得多条线和多个面对应的几何特征,再根据线的几何特征将多条线划分为直线、圆弧、自由曲线,根据面的几何特征将多个面划分为平面、柱面、球面、自由曲面;
[0040]
步骤二具体为:
[0041]
s2.1:对零件模型中每条线进行一维采样,获得当前线的各个离散点,以当前线的各个离散点的坐标以及计算所得的单位切向量作为当前线的几何特征,遍历采样所有线,获得所有线的几何特征,根据各条线的几何特征即(各个离散点的坐标d(ak)和单位切向量ds(ak))将线划分为直线、圆弧和自由曲线,若各个离散点的单位切向量相互平行,则为直线,若各个离散点的单位切向量不平行,由任意三点确定一个圆后,其余离散点都在该圆
上,则为圆弧,否则为自由曲面;
[0042]
s2.1中对零件模型中每条线一维采样,获得当前线的各个离散点,具体为:
[0043]
对零件模型中每条线参数化后,实现当前线的参数域区间[m
min
,m
max
]到几何域的映射,其中的映射,其中表示一维实数,对参数化后的当前线进行均匀采样后,使得参数域区间[m
min
,m
max
]离散为一维网格,获得当前线的各个离散点,其中一维网格的采样步长的计算公式如下:
[0044][0045]
其中,δm为一维网格步长,m
min
为当前条线的参数域区间下界,m
max
为当前条线的参数域区间上界,m为当前条线的离散点数量。
[0046]
具体实施中,参数域区间[0,1),m=11,δm=0.1。
[0047]
s2.2:对零件模型中每个面进行二维采样,获得当前面的各个离散点,以当前面的各个离散点的坐标以及计算所得的单位法向量作为当前面的几何特征,遍历采样所有面,获得所有面的几何特征,根据各个面的几何特征即(各个离散点的坐标f(b
i,j
)和单位法向量fr(b
i,j
))将面划分为平面、柱面、球面、自由曲面。若各个离散点的单位法向量相互平行,则为平面,若各个离散点的单位法向量不平行,由任意四点确定一个柱面后,其余离散点都在该柱面上,则为柱面,若各个离散点的单位法向量交于一点,则为球面,否则为自由曲面;
[0048]
s2.2中对零件模型中每个面进行二维采样,获得当前面的各个离散点,具体为:
[0049]
对零件模型中每个面参数化后,实现当前面的二维参数域区间[s
min
,s
max
]
×
[t
min
,t
max
]到几何域的映射,其中,的映射,其中,表示二维实数,对当前面的二维参数域区间[s
min
,s
max
]
×
[t
min
,t
max
]分别进行水平向右方向和竖直向上方向上的均匀采样,使得二维参数域区间[s
min
,s
max
]
×
[t
min
,t
max
]离散为二维网格,获得当前面的各个离散点,其中二维网格中水平向右和竖直向上的采样步长的计算公式如下:
[0050][0051][0052]
其中,δs为二维网格中水平向右方向的采样步长,δt为二维网格中与δs垂直的竖直向上方向的采样步长,s
min
、t
min
为二维参数域区间的两个下界,s
max
、t
max
为二维参数域区间的两个上界,q、p分别为当前面在水平方向和竖直方向上的离散点数量。
[0053]
具体实施中,二维参数域区间[0,1]
×
[0,1],q=p=11,δs=δt=0.1。
[0054]
二维参数域区间[s
min
,s
max
]和[t
min
,t
max
]的选择应尽可能贴近面的边界,对于二维参数域区间内的离散点b
i,j
,求出离散点b
i,j
的坐标f(b
i,j
)和单位法向量fr(b
i,j
),单位法向量fr(b
i,j
)始终与z轴方向成锐角,其中单位法向量fr(b
i,j
)的计算公式如下:
[0055]
[0056]
其中,fs(b
i,j
)为二维网格中离散点b
i,j
在水平方向上的切向量,f
t
(b
i,j
)为二维网格中离散点b
i,j
在竖直方向上的切向量;
[0057]
具体实施中,对于二维参数域区间内下标为(3,9)的离散点b
3,9
,其单位法向量fr(b
3,9
)的计算公式如下:
[0058][0059]
步骤三:根据自由曲线、自由曲面的各个离散点,对自由曲线、自由曲面进行插值计算和二次采样后,获得自由曲线和自由曲面的最终几何特征,从而获得零件模型中所有线和面的几何特征,用于作为神经网络的输入。
[0060]
步骤三具体为:
[0061]
s3.1:将每条自由曲线中任意两个相邻离散点相连后,求解由当前两个离散点所得区间的线性插值方程,根据线性插值方程求解获得当前两个离散点的插值曲线方程,计算公式如下:
[0062]flin
(s)=[f(sk)
·
(s
k 1-s) f(s
k 1
)
·
(s-sk)]/(s
k 1-sk)
[0063][0064]
q(s)=f
lin
(s-δs)-2f
lin
(s) f
lin
(s δs)
[0065]
其中,f
lin
(s)表示当前自由曲线d(s)在区间[sk,s
k 1
)的线性插值方程,s
min
<sk<s
max
且sk为第k个离散点ak的水平方向的坐标值,f(s)为自由曲线d(s)的插值曲线方程,s=sk α且α∈[0,δs),α表示水平方向的坐标值偏差参数,q(s)表示插值曲线方程的二阶小量;
[0066]
s3.2:求解插值曲线方程中切向量和线性插值方程所表示的线段相平行的点并作为插值点,将离散点的更新方向设置为水平方向,将当前两个离散点中水平方向坐标值最小的离散点的水平方向坐标值更新为插值点的水平方向坐标值,最后根据更新后的水平方向坐标值在零件模型中进行二次采样,获得当前离散点竖直方向的坐标值,进行更新当前离散点的坐标以及单位切向量;
[0067]
s3.3:遍历当前自由曲线的剩余离散点,当前自由曲线中所有离散点均处于同一平面中,重复s3.1-s3.2,更新剩余离散点的坐标以及单位切向量,将当前自由曲线所有离散点的更新后的坐标以及单位切向量作为当前自由曲线的最终几何特征;
[0068]
s3.4:为了消除采样方向对零件的特征带来影响,以0.5的概率将自由曲面的分割方向设置为水平方向或竖直方向,若选择水平方向,则以过离散点、法向量为竖直方向且水平向右方向的采样步长δt的多个平面将各个自由曲面进行曲面分割;若选择竖直方向,则以过离散点、法向量为水平方向且竖直向上方向的采样步长δs的多个平面将各个自由曲面进行曲面分割,获得各个自由曲面的多条分别处于相互平行平面内的自由曲线,将设置的分割方向作为对应的离散点的更新方向并重复s3.1-s3.3,对各个自由曲面中的多条自由曲线进行插值计算和二次采样,从而获得各个自由曲面的最终几何特征。
[0069]
对比实验采用零件模型面分割常用的数据集mfcad和abc进行测试,以准确率、每类准确率和交并比为评价指标,测试结果如下表1所示:
[0070]
表1各零件模型在不同方法下的评价指标表
[0071][0072]
由上表可知,对于mfcad数据集的面分割问题,本文方法取得较好的结果,对于abc数据集,尽管准确率有所降低,但相对于其他算法也得到了更好的分数。由此可得,本发明中提出的几何特征提取方法的质量和泛化能力得到很大地提升。
[0073]
以上描述的本发明实施方式仅为较佳实施例,并不为限定本发明的保护范围。对于在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应包括在本发明的权利要求保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。