技术特征:
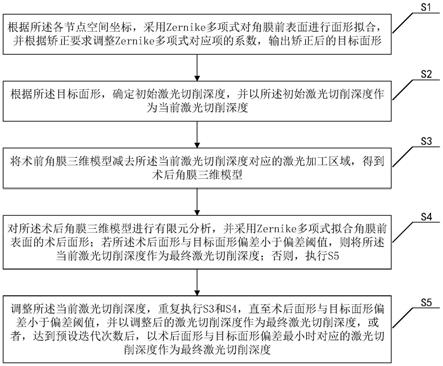
1.一种个性化屈光手术装置,其特征在于,包括:获取模块,用于获取患者角膜光学区各节点空间坐标;处理模块,用于执行以下步骤:s1,根据所述各节点空间坐标,采用zernike多项式对角膜前表面进行面形拟合,并根据矫正要求调整zernike多项式对应项的系数,输出矫正后的目标面形;s2,根据所述目标面形,确定初始激光切削深度,并以所述初始激光切削深度作为当前激光切削深度;s3,将术前角膜三维模型减去所述当前激光切削深度对应的激光加工区域,得到术后角膜三维模型;s4,对所述术后角膜三维模型进行有限元分析,并采用zernike多项式拟合角膜前表面的术后面形;若所述术后面形与目标面形偏差小于偏差阈值,则将所述当前激光切削深度作为最终激光切削深度;否则,执行s5;s5,调整所述当前激光切削深度,重复执行s3和s4,直至术后面形与目标面形偏差小于偏差阈值,并以调整后的激光切削深度作为最终激光切削深度,或者,达到预设迭代次数后,以术后面形与目标面形偏差最小时对应的激光切削深度作为最终激光切削深度。2.如权利要求1所述的个性化屈光手术装置,其特征在于,所述获取模块,还用于采集患者角膜形貌,以建立所述术前角膜三维模型,并以光轴方向为z轴,获取患者角膜光学区各节点空间坐标。3.如权利要求2所述的个性化屈光手术装置,其特征在于,所述s3中,对所述术后角膜三维模型进行有限元分析,并采用zernike多项式拟合角膜前表面的术后面形,包括:对所述术后角膜三维模型进行有限元分析,得到所述当前激光切削深度对应的受力变形数据;将所述受力变形数据转化为术后角膜各节点位移,以得到术后角膜各节点空间坐标,并采用zernike多项式拟合角膜前表面的术后面形。4.如权利要求3所述的个性化屈光手术装置,其特征在于,通过以下方式计算术后面形与目标面形偏差rms:其中,z
j
为术后角膜第j个节点到目标面形的距离,为术后角膜各节点到目标面形的平均距离,m为拟合角膜前表面所需的节点总数。5.如权利要求1所述的个性化屈光手术装置,其特征在于,所述s5中,调整所述当前激光切削深度,包括:通过在s4中zernike多项式对应项加入迭代系数δα,调整所述当前激光切削深度;其中,δα=(a
i
δd)-q
i
,(a
i
δd)为目标面形对应zernike多项式对应项的系数,q
i
为术后面形对应zernike多项式对应项的系数。6.如权利要求1所述的个性化屈光手术装置,其特征在于,所述s4中,对所述术后角膜三维模型进行有限元分析,包括:采用comsol固体力学模块对术后角膜三维模型进行有限元分析。7.如权利要求1所述的个性化屈光手术装置,其特征在于,所述s4中,对所述术后角膜
三维模型进行有限元分析,包括:采用2阶ogden超弹性方程对术后角膜三维模型进行有限元分析。8.如权利要求1所述的个性化屈光手术装置,其特征在于,所述s1中,矫正要求包括矫正屈光度或指定像差。9.如权利要求1所述的个性化屈光手术装置,其特征在于,所述光学区直径取4~10mm。
技术总结
本发明公开了一种个性化屈光手术装置,首先根据患者角膜光学区各节点空间坐标,采用Zernike多项式对角膜前表面进行面形拟合,并根据矫正要求调整Zernike多项式对应项的系数,输出矫正后的目标面形;根据目标面形,确定初始激光切削深度,并作为当前激光切削深度;将术前角膜三维模型减去当前激光切削深度对应的激光加工区域,得到术后角膜三维模型;对所述术后角膜三维模型进行有限元分析,并采用Zernike多项式拟合角膜前表面的术后面形;通过比较术后面形与目标面形的偏差大小,确定最终激光切削深度。如此,本发明通过将角膜生物力学性能的影响与加工参数进行耦合,能够更真实的模拟角膜的屈光手术过程,术后像差小、视觉质量高。觉质量高。觉质量高。
技术研发人员:吕晓华 周子孟 曾绍群 王雨
受保护的技术使用者:华中科技大学
技术研发日:2022.02.21
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。