1.本公开整体涉及关节镜医疗器具和组件以及操作关节镜医疗器具和组 件的方法。
背景技术:
2.多种疾病和损伤可能需要关节镜手术来修复任何软组织损伤。这些手 术通常需要多个关节镜装置,包括相机、流体源、流体引流装置和组织去 除装置。
3.对于关节镜修复手术,传统装置和外科方法具有若干缺点。例如,当 前关节镜装置组合同心布置的管,以便向关节镜装置的工作尖端提供所需 的子装置,诸如光学传感器、光源以及流体流和引流装置。由于这种同心 管布置,需要旋转密封件,以便在手术期间在关节镜装置的旋转期间独立 地操作每个子装置,诸如保持光学传感器直立取向。这可使操作者在手术 期间难以操作,因为需要多只手来操纵传统关节镜装置,以便正确操作所 有子装置。
4.因此,仍然需要用于关节镜手术的改善的装置和方法。
技术实现要素:
5.一般来讲,本公开提供了关节镜医疗器具和组件以及操作关节镜医疗 器具和组件的方法。
6.在一个方面,提供了一种关节镜,在一个实施方案中该关节镜包括手 持件,该手持件包括近侧端部、远侧端部以及在该近侧端部和远侧端部之 间延伸的纵向轴线。关节镜还包括轴,该轴沿着手持件的纵向轴线从该手 持件向远侧延伸。轴被构造成关节镜式推进到患者的身体中,多个管腔延 伸穿过该轴,该多个管腔中的至少一个管腔被构造成使流体通过该管腔, 并且该多个管腔中的至少一个管腔被构造成具有延伸穿过该管腔的电线。 关节镜还包括光学传感器,该光学传感器位于轴的远侧部分处。光学传感 器被配置为收集图像数据。关节镜还包括惯性传感器,该惯性传感器被配 置为收集取向数据,该取向数据指示由光学传感器收集的图像数据的取 向。
7.关节镜可以任意种方式变化。例如,关节镜还可包括多个输入致动 器,该多个输入致动器布置在手持件的外表面上,这些输入致动器中的每 个输入致动器可被构造成由用户致动,并且无论这些输入致动器中的哪个 输入致动器被致动,都由此使得产生相同功能。在至少一些实施方案中, 功能可包括通过该多个管腔中被构造成使流体通过管腔的该至少一个管腔 提供冲洗流体,功能可包括通过该多个管腔中被构造成使流体通过管腔的 该至少一个管腔提供负抽吸压力,并且/或者手持件可以是基本上圆柱形 的,并且输入致动器可围绕该手持件的整个圆周周向布置。
8.又如,取向数据可包括角度取向信息和轴线取向信息两者。
9.再如,关节镜还可包括第一电线,该第一电线延伸穿过该多个管腔中 的一个管腔,该第一电线可被配置为可操作地联接光学传感器和控制单 元,并且所收集的图像数据
可被配置为使用该第一电线传输到该控制单 元。在至少一些实施方案中,关节镜还可包括温度传感器,该温度传感器 位于轴的远侧部分处,该温度传感器被配置为收集温度数据,关节镜还可 包括第二电线,该第二电线延伸穿过该多个管腔中的第二管腔,该温度传 感器可经由该第二电线可操作地联接到控制单元,并且所收集的温度数据 可被配置为使用该第二电线传输到该控制单元;并且/或者关节镜还可包括 压力传感器,该压力传感器位于轴的远侧部分处,该压力传感器被配置为 收集压力数据,关节镜还可包括第二电线,该第二电线延伸穿过该多个管 腔中的第二管腔,该压力传感器可经由该第二电线可操作地联接到控制单 元,并且所收集的压力数据可被配置为使用该第二电线传输到该控制单 元。
10.另如,关节镜还可包括多个光纤,该多个光纤沿着轴延伸并环绕光学 传感器。在至少一些实施方案中,光纤可安装在轴的壁中。
11.又如,关节镜还可包括透镜,该透镜设置在光学传感器的远侧,并且 关节镜还可包括棱镜,该棱镜设置在该透镜的远侧。在至少一些实施方案 中,棱镜可成角度在约30
°
至约70
°
的范围内,并且在至少一些实施方案 中,棱镜可安装在轴的远侧部分上,该轴的该远侧部分可被构造成相对于 该轴的近侧部分枢转,并且关节镜还可包括位于手持件处的移动致动器, 该移动致动器被构造成被致动以引起该远侧部分的枢转。
12.另如,关节镜还可包括致动构件,该致动构件延伸穿过该多个管腔中 的至少一个管腔,该致动构件可以可操作地联接到轴的远侧部分,该轴的 该远侧部分可被构造成相对于该轴的近侧部分枢转,并且位于手持件处的 移动致动器可被构造成被致动以改变该致动构件的张力,并且由此引起该 远侧部分的枢转。在至少一些实施方案中,移动致动器可包括位于手持件 处的滑块,该滑块被构造成通过相对于该手持件滑动而被致动,从而改变 致动构件的张力。在至少一些实施方案中,移动致动器可包括位于手持件 处的张紧器,该张紧器在被致动时被构造成使致动力沿着致动构件转移到 远侧部分。在至少一些实施方案中,移动致动器可包括位于手持件处的可 旋转拨盘,该可旋转拨盘被构造成通过相对于该手持件旋转而被致动,从 而改变致动构件的张力。
13.再如,手持件的近侧端部可包括可与电缆组件配合的连接器,该电缆 组件包括电导管、光学导管和流体导管,每个导管被构造成与该多个管腔 中的一个管腔连通。在至少一些实施方案中,连接器可以是单个连接器。 在至少一些实施方案中,连接器可包括用于电导管、光学导管和流体导管 中的每个导管的连接器。
14.另如,关节镜可关于其纵向轴线基本上对称。再如,惯性传感器可位 于轴的远侧部分处。又如,惯性传感器可位于手持件处。
15.在另一个方面,提供了一种外科系统,在一个实施方案中该外科系统 包括关节镜,该关节镜包括手持件、轴、光学传感器和惯性传感器。手持 件包括近侧端部和远侧端部以及在该近侧端部和远侧端部之间延伸的纵向 轴线。轴沿着手持件的纵向轴线从该手持件向远侧延伸。轴被构造成关节 镜式推进到患者的身体中,多个管腔延伸穿过该轴,该多个管腔中的至少 一个管腔被构造成使流体通过该管腔,并且该多个管腔中的至少一个管腔 被构造成具有延伸穿过该管腔的电线。光学传感器位于轴的远侧端部并且 被配置为收集图像数据。惯性传感器位于手持件处并且被配置为收集取向 数据,该取向数据指示由光学传感器收集的图像数据的取向。外科系统还 包括控制单元,该控制单元被配置为从光学
传感器接收所收集的图像数 据,从惯性传感器接收所收集的取向数据,以及使用该取向数据来修改该 图像数据。
16.外科系统可以任意种方式变化。例如,取向数据可包括角度取向信息 和轴线取向信息两者。
17.又如,修改可包括基于取向数据将图像数据的图像旋转到期望取向, 并且控制单元可被配置为使得所旋转的图像输出到显示单元。在至少一些 实施方案中,控制单元可被配置为随着手持件围绕该手持件的纵向轴线的 旋转使用取向数据实时修改图像数据,并且控制单元被配置为随着该手持 件的该旋转使得所旋转的图像实时输出到显示单元。
18.另如,控制单元可包括泵,外科系统还可包括仓,该仓可被构造成可 释放地联接到该控制单元,并且该仓可包括管道,该管道被构造成在该仓 可操作地联接到该控制单元的情况下可操作地联接到该泵,使得该泵被构 造成通过该仓泵送流体。在至少一些实施方案中,管道可被构造成可操作 地联接到其中含有冲洗液体的流体源,并且在仓可操作地联接到控制单元 的情况下,泵可被构造成将该冲洗液体泵送到该多个管腔中被构造成使流 体通过管腔的该至少一个管腔中。在至少一些实施方案中,在仓可操作地 联接到控制单元的情况下,泵可被构造成使得在该多个管腔中被构造成使 流体通过管腔的该至少一个管腔中提供抽吸力。
19.再如,外科系统还可包括插入工具,该插入工具包括闭塞器和引导构 件,该引导构件可包括位于其外表面中的通道,该通道被构造成将该闭塞 器可释放地安置在其中,安置在该通道中的该闭塞器可被构造成推进穿过 皮肤切口,并且在该引导构件定位在该切口中的情况下并且在该闭塞器已 被推进穿过该皮肤切口并且从该通道释放之后,关节镜的轴可被构造成可 释放地安置在该通道中。
20.另如,关节镜还可包括多个输入致动器,该多个输入致动器布置在手 持件的外表面上,这些输入致动器中的每个输入致动器可被构造成由用户 致动,并且无论这些输入致动器中的哪个输入致动器被致动,都由此使得 产生相同功能。在至少一些实施方案中,功能可包括通过该多个管腔中被 构造成使流体通过管腔的该至少一个管腔提供冲洗流体,功能可包括通过 该多个管腔中被构造成使流体通过管腔的该至少一个管腔提供负抽吸压 力,并且/或者手持件可以是基本上圆柱形的,并且输入致动器可围绕该手 持件的整个圆周周向布置。
21.又如,关节镜还可包括第一电线,该第一电线延伸穿过该多个管腔中 的一个管腔,该第一电线可被配置为可操作地联接光学传感器和控制单 元,并且所收集的图像数据可被配置为使用该第一电线传输到该控制单 元。在至少一些实施方案中,关节镜还可包括温度传感器,该温度传感器 位于轴的远侧端部处,该温度传感器被配置为收集温度数据,关节镜还可 包括第二电线,该第二电线延伸穿过该多个管腔中的第二管腔,该温度传 感器可经由该第二电线可操作地联接到控制单元,并且所收集的温度数据 可被配置为使用该第二电线传输到该控制单元;并且/或者关节镜还可包括 压力传感器,该压力传感器位于轴的远侧端部处,该压力传感器被配置为 收集压力数据,关节镜还可包括第二电线,该第二电线延伸穿过该多个管 腔中的第二管腔,该压力传感器可经由该第二电线可操作地联接到控制单 元,并且所收集的压力数据可被配置为使用该第二电线传输到该控制单 元。
22.另如,关节镜还可包括多个光纤,该多个光纤沿着轴延伸并环绕光学 传感器。在至少一些实施方案中,光纤可安装在轴的壁中。
23.又如,关节镜还可包括透镜,该透镜设置在光学传感器的远侧,并且 关节镜还可包括棱镜,该棱镜设置在该透镜的远侧。在至少一些实施方案 中,棱镜可成角度在约30
°
至约70
°
的范围内,并且在至少一些实施方案 中,棱镜可安装在轴的可枢转远侧部分上,并且关节镜还可包括位于手持 件处的移动致动器,该移动致动器被构造成被致动以引起该可枢转远侧部 分的枢转。
24.另如,关节镜还可包括金属丝,该金属丝延伸穿过该多个管腔中的至 少一个管腔,该金属丝可以可操作地联接到轴的可枢转远侧部分,并且位 于手持件处的移动致动器可被构造成被致动以改变该金属丝的张力,并且 由此引起该可枢转远侧部分的枢转。在至少一些实施方案中,移动致动器 可包括位于手持件处的滑块,该滑块被构造成通过相对于该手持件滑动而 被致动,从而改变金属丝的张力。在至少一些实施方案中,移动致动器可 包括位于手持件处的张紧器,该张紧器在被致动时被构造成使致动力沿着 金属丝转移到可枢转远侧部分。在至少一些实施方案中,移动致动器可包 括位于手持件处的可旋转拨盘,该可旋转拨盘被构造成通过相对于该手持 件旋转而被致动,从而改变金属丝的张力。
25.再如,手持件的近侧端部可包括可与电缆组件配合的连接器,该电缆 组件包括电导管、光学导管和流体导管,每个导管被构造成与该多个管腔 中的一个管腔连通。在至少一些实施方案中,连接器可以是单个连接器。 在至少一些实施方案中,连接器可包括用于电导管、光学导管和流体导管 中的每个导管的连接器。
26.另如,关节镜可关于其纵向轴线基本上对称。
27.在另一个实施方案中,外科系统包括关节镜、控制单元和仓。关节镜 包括柄部、从该柄部向近侧延伸的电缆组件以及从该柄部向远侧延伸的细 长轴。电缆组件包括第一电缆、第二电缆和位于该电缆组件的近侧端部处 的电缆连接器。第一管腔和第二管腔延伸穿过轴。第一管腔与第一电缆的 第一导管连通,并且第二管腔与第二电缆的第二导管连通。控制单元被构 造成可释放地联接到电缆连接器。控制单元包括泵,并且在该控制单元可 释放地联接到电缆连接器的情况下,该控制单元被配置为经由第一电缆和 第一导管向关节镜提供电力。仓被构造成可释放地联接到控制单元。仓包 括管道。在仓可释放地联接到控制单元的情况下,泵被构造成使得流体在 管道、第二导管和第二电缆中流动。
28.外科系统可以任意种方式变化。例如,管道可被构造成可操作地联接 到其中含有冲洗液体的流体源,并且流体流动可包括冲洗液体的流动。在 至少一些实施方案中,在仓可释放地联接到控制单元并且仓的第二管道可 操作地联接到被构造成向手术部位递送抽吸力的外科工具的情况下,泵可 被构造成使得在第二管道中提供抽吸力,使得外科工具递送抽吸力。
29.又如,使得流体流动可包括使得在管道、第二导管和第二电缆中提供 抽吸力。在至少一些实施方案中,电缆组件可包括第三电缆,第三管腔可 延伸穿过轴,第三管腔可与第三电缆的第三导管连通,控制单元可包括第 二泵,仓可包括第二管道,该第二管道被构造成可操作地联接到其中含有 冲洗液体的流体源,并且在仓可释放地联接到控制单元的情况下,泵可被 构造成使得冲洗液体在第二管道、第三导管和第三电缆中流动。
30.再如,关节镜可包括光学传感器,该光学传感器位于轴的远侧部分 处,该光学传
感器可被配置为收集图像数据,并且提供给关节镜的电力可 被配置为向光学传感器供电。在至少一些实施方案中,关节镜可包括惯性 传感器,该惯性传感器被配置为收集取向数据,该取向数据指示由光学传 感器收集的图像数据的取向,并且控制单元可被配置为经由延伸穿过第一 导管和第一电缆的电线接收所收集的图像数据。惯性传感器可位于手持件 处或位于轴的远侧部分处。在至少一些实施方案中,控制单元可被配置为 使用所接收的取向数据来修改所接收的图像数据的图像,并且可被配置为 使得所修改的图像输出到显示单元。在至少一些实施方案中,修改可包括 基于取向数据将图像旋转到预先确定的期望取向,并且/或者控制单元可被 配置为随着柄部围绕该柄部和轴的公共纵向轴线的旋转使用取向数据实时 修改图像,并且控制单元可被配置为随着该柄部的旋转使得所修改的图像 实时输出到显示单元。
31.在另一个方面,提供了一种外科方法,在一个实施方案中该外科方法 包括利用限定纵向轴线的关节镜到达手术部位。关节镜的手持件包括电路 径、光学路径和流体路径。关节镜与电缆配合,该电缆包括与电路径连通 的电导管、与光学路径连通的光学导管以及与流体路径连通的流体导管。 关节镜包括可操作地联接到控制单元的光学传感器,并且关节镜包括可操 作地联接到控制单元的惯性传感器。外科方法还包括使关节镜围绕纵向轴 线旋转,同时控制单元基于由光学传感器收集的图像数据使得手术部位的 光学图像提供在显示单元上。在关节镜的整个旋转过程中,控制单元基于 由惯性传感器收集的取向数据使得光学图像的取向在显示单元上维持为相 同取向。
32.外科方法可具有任何数量的变型。例如,取向数据可包括角度取向信 息和轴线取向信息两者。又如,光学图像的取向是直立取向和侧向取向中 的一者。再如,关节镜可包括可操作地联接到控制单元的温度传感器,并 且在关节镜的旋转期间,控制单元可基于由温度传感器收集的温度数据使 得温度信息提供在显示单元上。另如,关节镜可包括可操作地联接到控制 单元的压力传感器,并且在关节镜的旋转期间,控制单元可基于由压力传 感器收集的压力数据使得压力信息提供在显示单元上。再如,关节镜可关 于其纵向轴线基本上对称。又如,手持件可以是基本上圆柱形的。
33.在另一个实施方案中,一种外科方法包括:使用关节镜的光学传感器 来收集手术部位的图像;使用所述关节镜的惯性传感器来收集关节镜的取 向;以及确定关节镜的所收集的取向是否匹配预先确定的期望取向。外科 方法还包括:如果所收集的取向确实匹配预先确定的期望取向,则使得图 像显示在显示单元上。外科方法还包括:如果所收集的取向不匹配预先确 定的期望取向,则基于所收集的取向来修改图像并且使得所修改的图像显 示在显示单元上。
34.该外科方法可以任意种方式变化。例如,图像的收集可包括在关节镜 围绕其纵向轴线的旋转期间收集多个图像,取向的收集可包括在关节镜的 旋转期间收集多个取向,所收集的取向中的每个取向可对应于所收集的图 像中的一个图像,并且针对所收集的图像中的每个图像相对于其对应的所 收集的取向进行确定。在至少一些实施方案中,关节镜可包括手持件和 轴,该轴从该手持件向远侧延伸;在关节镜的旋转期间,轴的远侧部分可 相对于纵向轴线和轴的近侧部分的枢转;纵向轴线可由手持件和轴的近侧 部分限定;并且光学传感器可定位在轴的远侧部分处。在至少一些实施方 案中,图像的收集可包括收集多个附加图像,取向的收集可包括收集多个 附加取向,所收集的附加取向中的每个附加取向可
对应于所收集的附加图 像中的一个附加图像,可针对所收集的附加图像中的每个附加图像相对于 其对应的所收集的附加取向进行确定,并且可在轴的远侧部分不相对于纵 向轴线和轴的近侧部分枢转的情况下,收集附加图像和附加取向。
35.又如,外科方法还可包括:响应于关节镜的围绕关节镜的手持件的圆 周布置的多个输入致动器中的任何一个输入致动器的致动而引起以下中的 至少一者:将冲洗流体从流体源并且穿过关节镜的第一内管腔递送到手术 部位,以及通过关节镜的第二内管腔在手术部位处提供抽吸。再如,预先 确定的期望取向可以是直立朝向和侧向取向中的一者。另如,外科方法还 可包括以下中的至少一者:基于由关节镜的温度传感器收集的温度数据, 使得温度信息显示在显示单元上;以及基于由关节镜的压力传感器收集的 压力数据,使得压力信息显示在显示单元上。
36.在另一个实施方案中,一种外科方法包括从控制单元提供电力,该控 制单元可释放地联接到关节镜并且可释放地联接到仓,以经由第一电缆向 关节镜提供电力。关节镜经由电缆组件的电缆连接器可释放地联接到控制 单元,该电缆组件还包括第一电缆和第二电缆,并且仓可释放地安置在控 制单元的仓保持器中。外科方法还包括使用控制单元的泵使得流体在仓的 管道中流动,并且由此引起流体在第二电缆中流动。
37.外科方法可具有任何数量的变型。例如,流体流动可包括冲洗液体的 流动。在至少一些实施方案中,外科方法还可包括使用控制单元的第二泵 来使得在仓的第二管道中提供抽吸力,使得可操作地联接到第二管道的外 科工具向手术部位递送抽吸力。
38.又如,使得流体流动可包括使得在管道中提供抽吸力。在至少一些实 施方案中,外科方法还可包括使用控制单元的第二泵引起冲洗液体在仓的 第二管道中的流动,并且由此引起冲洗液体在电缆组件的第三电缆中的流 动。
39.再如,外科方法还可包括使用位于关节镜的远侧部分处的光学传感器 来收集图像数据,控制单元可经由延伸穿过第一电缆的电线接收所收集的 图像数据,外科方法还可包括使用惯性传感器来收集取向数据。在至少一 些实施方案中,外科方法还可包括控制单元随着外科手术的执行使用所接 收的取向数据实时修改所接收的图像数据的图像,并且外科方法还可包括 随着外科手术的执行使用控制单元使得所修改的图像实时显示在显示单元 上。在至少一些实施方案中,修改可包括基于取向数据将图像旋转到预先 确定的期望取向,并且/或者修改和使得所修改的图像显示可随着关节镜的 柄部围绕关节镜的柄部和从柄部向远侧延伸的轴的公共纵向轴线的旋转而 实时发生。
附图说明
40.通过以下结合附图所作的详细描述,将更充分地理解本公开,在附图 中:
41.图1是关节镜医疗器具的一个具体实施的透视图;
42.图2是图1的关节镜医疗器具的示意图;
43.图3a是图1的关节镜医疗器具的尖端的一个具体实施的远侧端部视 图;
44.图3b是图1的关节镜医疗器具的尖端的另一个具体实施的远侧端部视 图;
45.图3c是图1的关节镜医疗器具的尖端的又一个具体实施的远侧端部视 图;
46.图3d是图1的关节镜医疗器具的尖端的再一个具体实施的远侧端部视 图;
47.图4a是图1的关节镜医疗器具的移动致动器的一个具体实施的局部透 视图;
48.图4b是图4a的移动致动器的局部透视图;
49.图4c是关节镜医疗器具的部分和图4a的移动致动器的分解透视图;
50.图5a是图1的关节镜医疗器具的移动致动器的一个具体实施的局部透 视图;
51.图5b是图5a的移动致动器的局部透视图;
52.图6a是图1的关节镜医疗器具的移动致动器的另一个具体实施的局部 透视图;
53.图6b是图6a的移动致动器的局部透视图;
54.图7是图1的关节镜医疗器具的移动致动器的又一个具体实施的侧视 图;
55.图8是图1的关节镜医疗器具的纵向轴和可枢转尖端的一个具体实施 的示意性侧视图;
56.图9是插入手术部位内的图1的关节镜医疗器具的透视图;
57.图10是图1的关节镜医疗器具在手术部位内的操作方法的一个具体实 施;
58.图11a是图1的关节镜医疗器具处于第一角度位置时的示意图;
59.图11b是图1的关节镜医疗器具处于第二角度位置时的示意图;
60.图11c是图1的关节镜医疗器具处于第三角度位置时的示意图;
61.图12a是插入工具的一个具体实施的透视图;
62.图12b为图12a的插入工具的另一个透视图;
63.图13是电缆连接器和电缆组件的一个具体实施的透视图;
64.图14是控制单元的一个具体实施的部分的透视图;
65.图15是图14的控制单元的前视图;
66.图16是图14的控制单元和仓的一个具体实施的透视图;
67.图17是控制单元的另一个具体实施的透视图;
68.图18是图17的控制单元可操作地联接到仓的另一个具体实施的透视 图;并且
69.图19是图17的控制单元可操作地联接到仓的另一个具体实施的透视 图。
具体实施方式
70.现在将描述某些示例性实施方案,以提供对本文所公开的装置和方法 的结构、功能、制造和用途的原理的全面理解。这些实施方案的一个或多 个示例在附图中示出。本领域的技术人员将会理解,在本文中具体描述的 和在附图中示出的装置、系统和方法是非限制性的示例性实施方案,并且 本发明的范围仅由权利要求书限定。结合一个示例性实施方案示出或描述 的特征部可与其它实施方案的特征部进行组合。此类修改和变型旨在包括 在本发明的范围之内。
71.此外,在本公开中,各实施方案中名称相似的部件通常具有类似的特 征部,因此在具体实施方案中,不一定完整地阐述每个名称相似的部件的 每个特征部。另外,在所公开的系统、装置和方法的描述中使用线性或圆 形尺寸的程度上,此类尺寸并非旨在限制可结合此类系统、装置和方法使 用的形状的类型。本领域中技术人员将认识到,针对任何几何形状可容易 地确定此类线性和圆形尺寸的等效尺寸。系统和装置及其部件的大小和形 状可至少取决于系统和装置将用于其中的受治疗者的解剖结构、系统和装 置将与其一起使用的部件的大小和形状、以及系统和装置将用于其中的方 法和手术。
72.一般来讲,本公开提供了关节镜医疗器具和组件以及用于操作关节镜 医疗器具
和组件的方法。
73.各图示出了本公开的关节镜医疗器具(在本文中也称为“关节镜”) 和组件及方法的实施方案。本文中描述了关于使用关节镜医疗器具到达手 术部位的装置、系统和方法。在示例性具体实施中,该关节镜医疗器具的 光学传感器可收集和输出图像数据,并且该关节镜医疗器具的惯性传感器 可收集和输出取向数据。该取向数据可用于修改所收集的光学图像,以在 该关节镜医疗器具的任何旋转之前、期间和之后维持显示在预先确定的期 望取向上的所收集的光学图像。图像数据可以是在执行外科手术期间收集 的手术部位的图像,这些图像使得外科医生和/或其他医疗专业人员可通过 查看无论关节镜医疗器具的旋转位置如何都一致地取向的图像而能够容易 地理解手术部位处的状况。该关节镜医疗器具还可包括被配置为收集和输 出压力和/或温度的至少一个传感器。可以在执行外科手术期间显示所收集 的压力和/或温度数据,这可以向外科医生和/或其他医疗专业人员提供关于 在其中收集了压力和/或温度的手术部位的有用信息。
74.本文所公开的关节镜医疗器具对于在用户单手操作时向手术部位提供 多种功能可能特别有用。关节镜医疗器具可包括手持件中的集成的电路 径、光学路径和流体路径。另外,关节镜医疗器具可包括光学传感器,该 光学传感器位于诸如从关节镜医疗器具的手持件延伸的轴的远侧端部处, 该光学传感器可操作地联接到控制单元。在关节镜医疗器具围绕的其纵向 轴线旋转期间,由光学传感器提供给显示器的手术部位的图像维持为期望 取向。光学图像的这种修改是由于来自关节镜医疗器具的惯性传感器的所 测量的取向数据,该惯性传感器例如布置在关节镜医疗器具的手持件内或 关节镜医疗仪器的远侧端部处,该惯性传感器被配置为确定光学传感器的 取向。
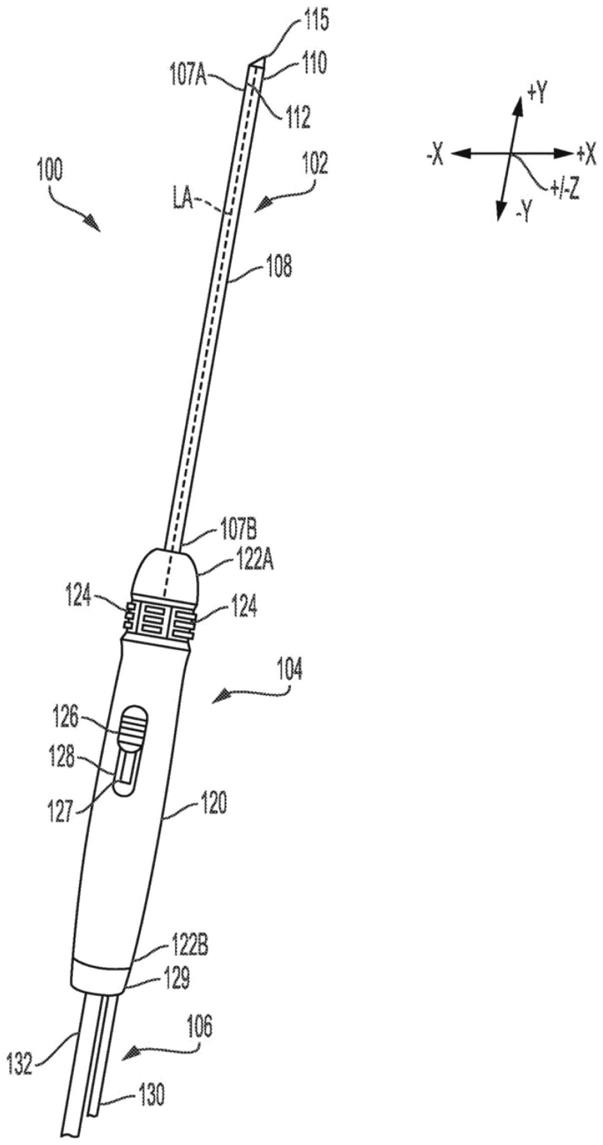
75.图1和图2示出了关节镜医疗器具100的一个具体实施。关节镜医疗 器具100被构造成用于微创外科手术,例如用于诊断和治疗关节问题的关 节镜手术。在使用关节镜100的一个示例中,外科医生在微创外科手术 (诸如关节镜手术)期间将关节镜100的轴108通过小切口插入患者体 内。使用关节镜100从手术部位内获得的图像经由关节镜100的光学图像 传感器,例如布置在轴102的远侧端部上的光学图像传感器,传输到高清 视频监视器。在手术期间,外科医生通过关节镜100的手持件120(在本文 中也称为“柄部”)将关节镜医疗器具100保持为使轴108在手术部位内 成角度。在示例性具体实施中,关节镜医疗器具100与至少一个辅助工具 组合使用,诸如用于组织或骨的刮刀或其他治疗装置。可通过辅助切口将 辅助工具插入手术部位中。
76.通常,关节镜医疗器具100包括轴组件102、手持件组件104和电缆组 件106。轴组件102包括沿着轴组件102和手持件组件104的公共纵向轴线 la从手持件组件104的手持件120延伸的轴108。因此,如图1和图2所 示,关节镜100具有直列式设计,其中轴108和手持件120彼此轴向对 准。直列式设计可有利于关节镜医疗器具100围绕纵向轴线la的简单、可 预测的用户旋转。同样如图1所示,轴108和手持件120关于纵向轴线la 基本上对称。因此,纵向轴线la是中性轴线。本领域的技术人员将理解, 由于任何数量的因素诸如制造公差和测量装备的灵敏度,构型可能不精确 地对称但是仍被认为基本上对称。轴108和手持件120基本上对称可有利 于关节镜医疗器具100围绕纵向轴线la的简单、可预测的用户旋转,可帮 助减少在轴108定位在其中的皮肤切口处对患者的损伤,因为轴108将可 预测地围绕切口中的纵向轴线la旋转,并且/或者可帮助减少对轴108定 位在其中的患者身体内的组织
和/或其他物质的损伤,因为轴108将可预测 地围绕患者身体内的纵向轴线la旋转。
77.轴108包括远侧端部107a和近侧端部107b。如图3a所示,多个管 腔184、186、188延伸穿过轴108。多个管腔184、186、188位于轴108的 内部,并且可具有各种构型,以便向和/或从手术部位提供各种功能。在示 例性具体实施中,管腔中的第一个管腔186被构造成通过该管腔选择性地 向手术部位提供冲洗流体,管腔中的第二个管腔188被构造成通过该管腔 向手术部位提供负抽吸压力,并且管腔中的第三个管腔184用于将一个或 多个电连接器(诸如一个或多个数据和电缆)承载到布置在轴108的远侧 端部107a处的一个或多个传感器。例如,在示例性具体实施中,光学传感 器140布置在轴108的远侧端部107a处,诸如在轴108的可枢转部分110 上并且在第三管腔184内,其中该一个或多个电连接器可操作地联接到光 学传感器140。一个或多个致动构件也可由第三管腔184承载(或位于第四 管腔中),如下文进一步所讨论。
78.在其他具体实施中,图3a中所示的管腔184、186、188的位置、尺寸 和形状可不同。例如,在该例示的具体实施中,流体管腔186、188各自具 有半月形横截面形状,但是它们也可具有其他横截面形状,诸如圆形、卵 形等。又如,在该例示的具体实施中,管腔184、186、188各自从纵向轴 线la径向偏移,但是在其他具体实施中,管腔中的一个管腔(例如,电管 腔184)可与纵向轴线la对准,而另外两个管腔(例如,流体管腔186、 188)从纵向轴线la径向偏移。再如,虽然在该具体实施中,流体管腔 186、188中的每个管腔被构造成提供不同的流体功能,其中第一管腔186 提供冲洗并且第二管腔188提供抽吸,但是在其他具体实施中,流体管腔186、188中的每个管腔可被构造成提供抽吸,或者流体管腔186、188中的 每个管腔可被构造成提供冲洗,或者管腔186、188的流体功能可对换,其 中第二管腔188提供冲洗并且第一管腔186提供冲洗抽吸。
79.轴108可与手持件120一起旋转允许多个管腔184、186、188与手持 件120一起旋转。因此,流体管腔186、188可以是可旋转的,而不必经过 任何可旋转密封件。可旋转密封件传统上用于提供冲洗和/或抽吸的装置 中,但易于在旋转期间和/或由于旋转而引起流体泄漏。关节镜100不包括 流体管腔186、188经过的任何可旋转密封件,从而消除了在任何此类可旋 转密封件处发生泄漏的可能性。另外,密封件可能较重,所以关节镜100 不包括可旋转密封件可因此使关节镜100比提供冲洗和/或抽吸的传统工具 更轻,这可使用户操纵关节镜100不那么累并且/或者用户更容易用一只手 操纵关节镜进行旋转、致动等。
80.图3b示出了轴102的另一个具体实施,该轴呈关节镜的轴组件302的 轴308的形式,具有延伸穿过轴308的多个管腔384、386、388。轴组件 302和轴308分别以类似于图1和图2的轴组件102和轴108的方式被构造 和使用。管腔384、386、388以类似于图3a的管腔184、186、188的方式 被构造和使用。在该例示的具体实施中,多个灯390布置在轴308内并且 延伸穿过其中。在该例示的具体实施中,灯390是光纤,但是其他灯诸如 led等也可与布置在轴308内的灯的适当电子引线一起使用。灯390围绕 轴308的周边布置,并且被构造成提供向远侧定向的光,这可帮助照亮手 术部位和/或减少阴影,并且由此允许光学传感器140收集更清晰、可更容 易看到的图像。灯390围绕轴308的周边等距且径向地布置,并且因此环 绕光学传感器140。灯390安装在轴308的壁392中,但是也可以其他方式 组装在轴308中。灯390安装在壁392中允许轴308和灯390(至少作为光 纤)被共挤出。灯390可操作地联接到外部光源和/或控制单元160,该控 制单元在图2中示出并且在下文进一步讨论。控制
单元160被配置为控制 灯390的激活(例如,以打开照明)和灯390的停用(例如,以关闭照 明)。例示的具体实施包括八个灯390,但是关节镜也可包括另一个数量的 灯390。包括多个灯390而不是仅一个灯可帮助确保光学传感器的视野被完 全照亮,而无论轴308的旋转取向如何并且无论轴308的可枢转部分(如 果存在)是否枢转。
81.图3c示出了轴102的另一个具体实施,该轴呈关节镜的轴组件402的 轴408的形式,具有延伸穿过轴408的多个管腔484、486、488。轴组件 402和轴408分别以类似于图1和图2的轴组件102和轴108的方式被构造 和使用。管腔484、486、488以类似于图3a的管腔184、186、188的方式 被构造和使用。在该例示的具体实施中,流体管腔486、488各自具有圆形 横截面形状而不是半月形横截面形状。在该例示的具体实施中,第四管腔 185延伸穿过轴408。第四管腔485是类似于第三管腔184的电管腔,其用 于将一个或多个电连接器(诸如一个或多个数据和电缆)承载到布置在轴 408的远侧端部处的一个或多个传感器。在该例示的具体实施中,该一个或 多个传感器是光学传感器140,以及上文讨论的压力传感器和温度传感器 144、146,但也可使用其他传感器。同样在该例示的具体实施中,多个灯 490布置在轴408内并且延伸穿过其中。灯490以类似于图3b的灯390的 方式被构造和使用。
82.图3d示出了轴102的另一个具体实施,该轴呈关节镜的轴组件422的 轴420的形式,具有延伸穿过轴420的多个管腔424、426、428、430。轴 组件422和轴420分别以类似于图1和图2的轴组件102和轴108的方式被 构造和使用。管腔424、426、428以类似于图3a的管腔184、186、188的 方式被构造和使用。第四管腔430以类似于图3c的第四管腔485的方式被 构造和使用。在该例示的具体实施中,电管腔424具有不规则横截面形状 而不是圆形横截面形状,流体管腔426、428各自具有渐缩弧形横截面形状 而不是半月形横截面形状,并且第四管腔430具有不规则横截面形状而不 是圆形横截面形状。
83.再次参考图1和图2,轴108的可枢转部分110位于轴108的远侧部分 处,并且被构造成相对于手持件组件104并且相对于轴108的靠近枢转点 112的近侧部分在枢转点112处枢转。可枢转部分110的枢转动作可允许在 关节镜医疗器具100插入手术部位内的情况下在手术部位处具有更大视 野。在可枢转部分110相对于手持件120并且相对于轴108的近侧部分在 枢转点112处枢转的情况下,手持件120和轴108的近侧部分相对于彼此 保持其直列式构型。可枢转部分110与轴108的近侧部分之间的枢转连接 可以多种方式中的任一种方式来实现,例如通过使用铰链接头(例如,活 动铰链或其他铰链)、固定在枢转孔中的枢转销等。在其他具体实施中, 轴108不包括可枢转部分110,使得轴108沿着纵向轴线la具有固定的零 角度,并且使得关节镜100具有由手持件120和轴108限定的固定的直列 式设计。
84.如上所述,关节镜100被构造成用于关节镜外科手术。因此,轴108 可具有有利于其在关节镜外科手术中使用的尺寸,在关节镜外科手术中, 接头以微创方式检查和/或操作。例如,轴108的外径可以在约3mm至约 8mm的范围内。又如,轴108的外径可以在约5mm至约7mm的范围内。 再如,轴108的外径可以是约6mm。本领域的技术人员将理解,由于任何 数量的因素诸如制造公差和测量装备的灵敏度,值可能不居于精确值,但 是仍被认为是约为该值。
85.在示例性具体实施中,轴108由一种或多种生物相容性材料制成,并 且手持件120由一种或多种生物相容性材料制成。可用于轴108和/或手持 件120的生物相容性材料的示例包括不锈钢,例如316或304级不锈钢, 以及热塑性塑料,例如聚碳酸酯、丙烯腈(abs)、聚
碳酸酯/abs (pc/abs)共混物等。在其中轴108和手持件120由热塑性塑料制成的示 例性具体实施中,轴108和手持件120可包括用于连通电回路和流体回路 的挤出热塑性管道和导管。实际上可共挤出不同的材料,诸如电线和光纤 电缆,以便简化关节镜100的构造。
86.关节镜医疗器具100的手持件组件104被构造成由用户手持以操作和 操纵关节镜100。在示例性具体实施中,手持件组件104包括基本上圆柱形 的手持件120。本领域的技术人员将理解,由于任何数量的因素诸如制造公 差和测量装备的灵敏度,形状可能不是精确地圆柱形但是仍被认为是基本 上圆柱形的。手持件120是基本上圆柱形的可通过提供便于用户以一只手 牢固地保持的形状来有利于关节镜100的操纵。然而,手持件120可具有 其他形状,诸如球形或梨形、沙漏形等。如上所述,在示例性具体实施 中,手持件120关于纵向轴线la基本上对称,这可通过诸如圆柱形、球形 或梨形和沙漏形的形状来实现。
87.手持件120包括远侧端部122a和近侧端部122b,其中纵向轴线la 在远侧端部122a和近侧端部122b之间延伸。
88.手持件120包括至少一个输入致动器124,该至少一个输入致动器被 构造成控制关节镜医疗器具100的各种功能。如在该例示的具体实施中, 手持件120可包括布置在手持件120的表面上的多个输入致动器124,以有 利于用户接触这些输入致动器。多个输入致动器124在手持件120上周向 布置,使得输入致动器124完全环绕手持件120。由于输入致动器124的这 种周向布置,外科医生或关节镜100的其他用户可容易地与输入致动器124 交互,而与手持件120的旋转位置无关。输入致动器124被构造成被致动 以激活关节镜医疗器具100的功能,诸如通过轴108的管腔中的一个管腔 提供冲洗流体。输入致动器124可具有各种构型,诸如被构造成通过被用 户按下而被致动的按钮(如在该例示的具体实施中,其中多个按钮围绕手 持件120周向布置)、被构造成通过被用户从第一位置移动到第二位置而 被致动的操纵杆或开关、被构造成被用户从第一位置旋转到第二位置的拨 盘、被构造成通过在通道内从第一位置滑动到第二位置而被致动的滑块 等。
89.手持件120包括布置在其上的移动致动器126,如图4a和图4b所 示。移动致动器126和输入致动器124布置在手持件120上,以允许用户 使用正在保持手持件120的单只手来操作输入致动器124和移动致动器 126,而用户无需第二只手来致动输入致动器124中的任何一个输入致动器 或致动移动致动器126,这可使用户腾出第二只手进行其他外科任务,并且 无需用户在致动输入致动器124和致动移动致动器126之间放下手持件120 和重新抓握手持件120,这可在执行外科手术期间节约时间并且/或者更快 速地允许进行期望动作,因为用户无需重新抓握手持件120以执行期望致 动。
90.移动致动器126被构造成被致动以使轴108的可枢转部分110枢转。 在示例性具体实施中,移动致动器126的致动使致动力沿着延伸穿过轴108 的管腔184、186、188中的一个管腔的致动构件131(例如,金属丝、杆 等)转移到布置在轴108的远侧端部107a处的可枢转部分110。移动致动 器126可具有多种构型。如在该例示的具体实施中,移动致动器126可包 括布置在手持件120上的通道128内的滑块,其中滑块126被构造成通过 在通道128内纵向滑动而被致动。移动致动器126的其他示例包括被构造 成通过被用户按下而被致动的按钮、被构造成通过被用户从第一位置移动 到第二位置而被致动的操纵杆或开关、被构造成被用户从第一位置旋转到 第二位置的拨盘等。
91.通道128包括布置在通道128的底部处的间隙127。间隙127被构造成 允许移动致
动器126经由安装件133固定到致动构件131。在该例示的具体 实施中,致动构件131是金属丝。金属丝131沿着关节镜100纵向延伸, 并且更具体地,从手持件120向远侧延伸并且穿过轴108的第三管腔184 延伸到轴108的可枢转部分110。然而,如上所述,致动构件132可延伸穿 过轴108的第四管腔,而不是穿过该一个或多个电连接器在其中延伸的第 三管腔184。致动构件131固定到可枢转部分110,例如,致动构件131的 远侧端部附接到可枢转部分110的近侧端部。
92.图4c示出了使用安装件133将致动构件131固定到移动致动器126的 一个具体实施。移动致动器126包括被构造成由用户操纵的上部部分 126u,以及其中形成有开口126g的下部部分126l。安装件133包括向上 延伸的销133p,其被构造成延伸穿过开口126g并且牢固地安置在形成于 上部部分126u中的开口(在图4c中被遮挡)中,诸如通过经由压入配 合、经由销133p上和上部部分的开口中的对应螺纹、使用粘合剂等安置在 其中。在该例示的具体实施中,弹簧133s围绕销133p盘绕,这可帮助将 销133p固定在上部部分的开口中。
93.图1和图4a示出了处于第一位置的移动致动器126,其对应于可枢转 部分110未枢转的情况。在移动致动器126处于第一位置的情况下,金属 丝131处于非张紧状态。金属丝131的默认状态处于非张紧状态,这允许 移动致动器126的默认状态为第一位置。图4b示出了处于第二位置的移动 致动器126,其对应于可枢转部分110枢转的情况。在移动致动器126处于 第二位置的情况下,金属丝131处于张紧状态。当移动致动器126被致动 以从第一位置移动到第二位置时,例如,当用户将滑块126沿着通道128 向近侧移动时,可操作地联接到移动致动器126的安装件133也向近侧移 动。因此,移动致动器126的向近侧移动使得张力施加到又可操作地联接 到安装件133的金属丝131。在第一纵向移动方向md1(在该例示的具体 实施中是向近侧的方向)上向金属丝131施加张力。张力通过在可枢转部 分110上向近侧拉动金属丝131使得可枢转部分110在枢转点112处枢转。 类似地,当移动致动器126在与第一纵向移动方向md1相反的第二纵向移 动方向上(例如,向远侧)从第二位置移动到第一位置时,金属丝131上 的张力减小。减小的张力使得可枢转部分110朝向其直列式位置往回枢 转,当移动致动器126到达其第一位置时可枢转部分110到达其直列式位 置。
94.移动致动器126的默认状态允许移动致动器126处于第一位置,而无 需外科医生或其他用户将移动致动器126保持在第一位置。除非外科医生 或其他用户另外需要,否则可枢转部分110可因此保持处于其直列式状 态。移动致动器126可被构造成手动保持在通道128内直到并包含第二位 置的任何位置中,从而允许可枢转部分110枢转成任何角度直到其相对于 纵向轴线la的最大可能角度位置。另选地或除此之外,移动致动器126可 被构造成在通道128内在一个或多个预设位置处锁定就位。例如,关节镜 100可包括锁定机构,该锁定机构被构造成将移动致动器126锁定在第二位 置。锁定机构可具有多种构型中的任一种构型。例如,锁定机构可包括形 成于轴108和移动致动器126中的一者上的突起,该突起被构造成自动可 释放地接合形成于轴108和移动致动器126中的另一者中的凹陷,并且当 移动致动器126从第二位置移动时该突起和该凹陷彼此自动脱离。又如, 锁定机构可包括位于轴108和移动致动器126中的一者上的夹子,并且该 夹子被构造成自动可释放地接合轴108和移动致动器126中的另一者的部 分,并且当移动致动器126从第二位置移动时该夹子自动脱离该部分。再 如,锁定机构可包括在移动致动器126上或其中的第一磁体和在轴108上 或其中的第二磁体,该第二磁体被构造成当在其操作距离中时磁性地接合 该第
一磁体,使得移动致动器126由于第一磁体和第二磁体彼此磁性吸引 而保持在第二位置,并且能够通过使移动致动器126从第二位置朝向第一 位置移动而由第二位置释放。无论被构造成将移动致动器126锁定在第二 位置的锁定机构的构型如何,移动致动器126可被构造成手动保持在第一 位置与第二位置之间的任何选定位置中。另选地,移动致动器126可被构 造成锁定在第一位置与第二位置之间的一个或多个附加位置中。例如,锁 定机构可包括形成于轴108和移动致动器126中的一者上的突起,该突起 被构造成自动可释放地接合形成于轴108和移动致动器126中的另一者中 的多个凹陷中的每个凹陷,其中每个凹陷对应于移动致动器126可锁定在 其中的不同位置。又如,锁定机构可包括形成于轴108和移动致动器126 中的一者中的凹陷,该凹陷被构造成自动可释放地接合形成于轴108和移 动致动器126中的另一者上的多个突起中的每个突起,其中每个突起对应 于移动致动器126可锁定在其中的不同位置。再如,锁定机构可包括在移 动致动器126上或其中的第一磁体和在轴108上或其中的多个附加磁体, 该多个附加磁体被构造成当在其操作距离中时磁性地接合该第一磁体,使 得移动致动器126由于第一磁体磁性吸引到该多个附加磁体中的一个附加 磁体而保持就位。
95.如上所述,移动致动器126示出为图1、图4a和图4b中的滑块。图 5a和图5b示出了移动致动器126的另一个具体实施,该移动致动器呈一 对按钮226a、226b的形式,布置在手持件220内。手持件220以类似于手 持件120的方式被构造和使用。在该例示的具体实施中,致动构件231是 以类似于金属丝131的方式被构造和使用的金属丝,该致动构件经由安装 件235固定在手持件220内,该安装件以类似于安装件133的方式被构造 和使用。按钮226a、226b中的每一者包括张紧器233a、233b。张紧器 233a、233b被构造成选择性地接合金属丝231以改变金属丝231的张力, 并且因此引起可枢转部分110的枢转。
96.图5a示出了处于第一位置的移动致动器226a、226b,其对应于可枢 转部分110未枢转的情况。在移动致动器226a、226b处于第一位置的情况 下,金属丝231处于非张紧状态。图5b示出了处于第二位置的移动致动器 226a、226b,其对应于可枢转部分110枢转的情况。在移动致动器 226a、226b处于第二位置的情况下,金属丝231处于张紧状态。当移动致 动器226a、226b被致动,移动致动器226a、226b从第一位置移动到第二 位置时,例如,当用户在基本上垂直于纵向轴线la的第一移动方向md2上径向向内挤压按钮226a、226b中的每一者时,张力施加到金属丝231。 更具体地,当按钮226a、226b被挤压时,张紧器233a、233b移动成与金 属丝231接触,并且通过使金属丝231抵靠张紧器233a、233b的面向径向 向内方向的弯曲的凸表面变形而在金属丝231中产生张力。金属丝231的 变形使得金属丝231向可枢转部分110施加向近侧的力,从而使得可枢转 部分110在与上文关于金属丝131所讨论的枢转点类似的枢转点112处枢 转。按钮226a、226b的释放使得张力得到释放,从而允许可枢转部分110 在枢转点112处再次枢转并且返回到其直列式位置。
97.移动致动器226a、226b的默认状态允许移动致动器226a、226b处 于第一位置,而无需外科医生或其他用户将移动致动器226a、226b保持 在第一位置。除非外科医生或其他用户另外需要,否则可枢转部分110可 因此保持处于其直列式状态。移动致动器226a、226b可利用偏置元件 (诸如弹簧、弹性带等)偏置到默认状态,该偏置元件被构造成将移动致 动器226a、226b偏置到第一位置。例如,关节镜可包括第一偏置元件, 该第一偏置元件被构造成将第一按钮226a径向向外偏置,使得第一按钮 226a处于第一位置;和第二偏置元件,
该第二偏置元件被构造成将第二按 钮226b径向向外偏置,使得第二按钮226b处于第一位置。
98.移动致动器226a、226b可被构造成手动保持在直到并包含第二位置 的任何位置中,从而允许可枢转部分110枢转成任何角度直到其相对于纵 向轴线la的最大可能角度位置。另选地或除此之外,移动致动器226a、 226b可被构造成在一个或多个预设位置处相对于手持件220锁定就位。例 如,关节镜可包括锁定机构,该锁定机构被构造成将移动致动器226a、 226b锁定在第二位置。锁定机构可具有多种构型中的任一种构型,类似于 上文相对于移动致动器126所讨论的构型。无论被构造成将移动致动器 226a、226b锁定在第二位置的锁定机构的构型如何,移动致动器226a、 226b可被构造成手动保持在第一位置与第二位置之间的任何选定位置中。 另选地,移动致动器226a、226b可被构造成锁定在第一位置与第二位置 之间的一个或多个附加位置中,类似于上文相对于移动致动器126所讨论 的一个或多个附加位置。
99.图6a和图6b示出了移动致动器126作为移动致动器326的另一个具 体实施,该移动致动器呈可旋转拨盘的形式,布置在手持件320内。手持 件320以类似于手持件120的方式被构造和使用。移动致动器326可移动 地安置在形成于手持件320中的孔334中。在该例示的具体实施中,致动 构件331是以类似于金属丝131的方式被构造和使用的金属丝,该致动构 件通过固定到设置在手持件320内的可旋转拨盘320的底部部分333而固 定在手持件320内。图6a和图6b示出了固定到底部部分333中的安装件 335的金属丝331,诸如通过焊接到安装件335、捆绑到安装件335、被安 装件335夹紧等。安装件335可以是底部部分333的内表面,或者可以是 固定到底部部分333的独立元件。底部部分333包括其中的开口336,该开 口围绕可旋转拨盘326相对于安装件335定位成约180
°
。金属丝331延伸 穿过开口336,跨过底部部分333内的可旋转拨盘326,并且固定到安装件335。可旋转拨盘326被构造成通过旋转而被致动,从而改变金属丝331上 的张力以使可枢转部分110在枢转点112处枢转。
100.图6a示出了处于第一位置的移动致动器326,其对应于可枢转部分 110未枢转的情况。在移动致动器326处于第一位置的情况下,金属丝331 处于非张紧状态,这允许移动致动器326的默认状态为第一位置。金属丝 331的默认状态处于非张紧状态,这允许移动致动器326的默认状态为第一 位置。图6b示出了处于第二位置的移动致动器326,其对应于可枢转部分 110枢转的情况。在移动致动器326处于第二位置的情况下,金属丝331处 于张紧状态。当移动致动器326被致动,移动致动器326从第一位置移动 到第二位置时,例如,当用户使可旋转拨盘在第一移动方向md3上旋转 时,随着金属丝331通过沿着可旋转拨盘326的底部部分333的外表面卷 绕而变形,张力施加到金属丝331。张力使得金属丝331向可枢转部分110 施加向近侧的力,从而使得可枢转部分110在与上文关于金属丝131所讨 论的枢转点类似的枢转点112处枢转。随着可旋转拨盘326在与第一移动 方向md3相反的第二移动方向上旋转,可旋转拨盘326的释放使得张力得 到释放,从而允许可枢转部分110在枢转点112处再次枢转并且返回到其 直列式位置。在该例示的具体实施中,第一移动方向md3为逆时针并且第 二移动方向为顺时针,但是第一移动方向md3也可为顺时针并且第二移动 方向可为逆时针。
101.移动致动器326的默认状态允许移动致动器326处于第一位置,而无 需外科医生或其他用户将移动致动器326保持在第一位置。除非外科医生 或其他用户另外需要,否则
可枢转部分110可因此保持处于其直列式状 态。移动致动器326可被构造成手动保持在直到并包含第二位置的任何位 置中,从而允许可枢转部分110枢转成任何角度直到其相对于纵向轴线la 的最大可能角度位置。另选地或除此之外,移动致动器326可被构造成在 一个或多个预设位置处相对于手持件320锁定就位。例如,关节镜可包括 锁定机构,该锁定机构被构造成将移动致动器326锁定在第二位置。锁定 机构可具有多种构型中的任一种构型,类似于上文相对于移动致动器126 所讨论的构型。无论被构造成将移动致动器326锁定在第二位置的锁定机 构的构型如何,移动致动器326可被构造成手动保持在第一位置与第二位 置之间的任何选定位置中。另选地,移动致动器326可被构造成锁定在第 一位置与第二位置之间的一个或多个附加位置中,类似于上文相对于移动 致动器126所讨论的一个或多个附加位置。
102.图7示出了移动致动器126作为移动致动器426的另一个具体实施, 该移动致动器呈操纵杆的形式,可移动地在枢转点435处附接到手持件 420。手持件420以类似于手持件120的方式被构造和使用。在该例示的具 体实施中,致动构件431是以类似于金属丝131的方式被构造和使用的金 属丝,该致动构件经由安装件433固定在手持件420内,该安装件以类似 于安装件133的方式被构造和使用。操纵杆426被构造成通过在枢转点435 处枢转而被致动,从而改变金属丝431上的张力以使可枢转部分110在枢 转点112处枢转。
103.图7示出了处于第一位置的移动致动器426,其对应于可枢转部分110 未枢转的情况。在移动致动器426处于第一位置的情况下,金属丝431处 于非张紧状态。在移动致动器426处于对应于可枢转部分110枢转的第二 位置的情况下,金属丝431处于张紧状态。当移动致动器426被致动,移 动致动器426从第一位置移动到第二位置时,例如,当用户在第一移动方 向md4上朝向手持件420向下推动操纵杆426时,张力施加到金属丝 431。更具体地,当操纵杆426朝向手持件420径向向内推动并且在枢转点 435处枢转时,固定到操纵杆426的安装件433径向向外移动,并且由此通 过在向近侧方向上拉动金属丝431而在金属丝431中产生张力。金属丝431 的拉动使得金属丝431向可枢转部分110施加向近侧的力,从而使得可枢 转部分110在与上文关于金属丝131所讨论的枢转点类似的枢转点112处 枢转。操纵杆426的释放使得张力得到释放,从而允许可枢转部分110在 枢转点112处再次枢转并且返回到其直列式位置。
104.移动致动器426的默认状态允许移动致动器426处于第一位置,而无 需外科医生或其他用户将移动致动器426保持在第一位置。除非外科医生 或其他用户另外需要,否则可枢转部分110可因此保持处于其直列式状 态。移动致动器426可被构造成手动保持在直到并包含第二位置的任何位 置中,从而允许可枢转部分110枢转成任何角度直到其相对于纵向轴线la 的最大可能角度位置。另选地或除此之外,移动致动器426可被构造成在 一个或多个预设位置处相对于手持件420锁定就位。例如,关节镜可包括 锁定机构,该锁定机构被构造成将移动致动器426锁定在第二位置。锁定 机构可具有多种构型中的任一种构型,类似于上文相对于移动致动器126 所讨论的构型。无论被构造成将移动致动器426锁定在第二位置的锁定机 构的构型如何,移动致动器426可被构造成手动保持在第一位置与第二位 置之间的任何选定位置中。另选地,移动致动器426可被构造成锁定在第 一位置与第二位置之间的一个或多个附加位置中,类似于上文相对于移动 致动器126所讨论的一个或多个附加位置。
105.再次参考图1和图2,关节镜100的电缆组件106被构造成通过手持件 120向轴108提供各种功能。电缆组件106可操作地联接到手持件组件104 以提供此类功能。如在该例示的具体实施中,手持件120的近侧端部122b 可包括与电缆组件106配合的连接器129。电缆组件106包括电导管、光学 导管和流体导管,其中每个导管是独立的电缆,并且手持件104包括用于 电导管、光学导管和流体导管中的每个导管的单独的连接器129。另选地, 导管中的每个导管可形成于被构造成联接到手持件120的单个连接器129 的单个电缆内。如在该例示的实施方案中,连接器129可与电缆组件106 固定地配合,或者连接器129可被构造成可释放地联接到电缆组件106。
106.手持件120包括至少一个管腔以将电缆组件106的导管与轴108的内 部管腔可操作地联接,例如,手持件包括与轴108相同数量的内部管腔。 在该例示的具体实施中,电缆组件106包括第一电缆130和第二电缆132。 第一电缆130包括第一导管,该第一导管包括其中的电线,该电线被构造 成向和从关节镜100的任何传感器,例如布置在轴108或手持件120内的 任何传感器传递电力和数据。致动构件131也可定位在第一导管中。第二 电缆132包括第二导管,该第二导管被构造成将来自流体源的冲洗流体通 过手持件120和轴108的内部管腔186中的一个内部管腔提供到手术部 位。第二电缆132还包括第三导管,该第三导管被构造成将负抽吸压力通 过手持件120和轴108的内部管腔188中的另一个内部管腔提供到手术部 位。
107.如上所述,关节镜医疗器具100可包括各种传感器,这些传感器可布 置在轴108和手持件120内。如图2所示,在该例示的具体实施中,关节 镜100包括:光学传感器140(例如,光电二极管、光电晶体管、光敏电 阻、光纤相机或其他光学传感器),该光学传感器被配置为收集光学数 据;压力传感器142(例如,应变计、表压传感器、差压传感器或其他压力 传感器),该压力传感器被配置为收集压力数据;温度传感器144(例如, 热敏电阻、热电偶、热敏电阻或其他温度传感器),该温度传感器被配置 为收集温度数据;和惯性传感器146(例如,惯性测量单元(imu)、陀螺 仪、加速度计、倾斜/角度开关(无汞)或其他惯性传感器),该惯性传感 器被配置为收集取向数据。在其他具体实施中,单个传感器(例如,包括 多种传感器功能的单个芯片)可被配置为收集关于两种或更多种参数的数 据,使得可提供一个、两个或三个传感器来收集光学、惯性、压力和温度 数据。在其他具体实施中,可省略传感器140、142、144、146中的一个或 多个传感器。例如,关节镜100可包括光学传感器140和惯性传感器146, 但不包括压力传感器142和/或温度传感器144。
108.图2示出了布置在轴108的可枢转部分110内的光学传感器140、压力 传感器142、温度传感器144和惯性传感器146。在该具体实施中,传感器 140、142、144、146被示出为完全设置在可枢转部分110内,这可帮助保 护传感器140、142、144、146免受损坏。然而,传感器140、142、144、 146中的至少一个传感器可仅部分地设置在轴108的可枢转部分110内并且 /或者可(完全或部分地)设置在轴108内靠近可枢转部分100。光学传感 器140、压力传感器142、温度传感器144和惯性传感器146定位在可枢转 部分110处(完全或部分地设置在其中)可有利于传感器140、142、144、 146在手术部位收集有用的准确数据,无论可枢转部分110是否相对于纵向 轴线l在枢转点112处铰接,并且在可枢转部分110铰接的情况下,无论 可枢转部分110铰接成什么角度。例如,光学传感器140布置在可枢转部 分110内可允许光学传感器140收集图像数据,该图像数据至少示出在轴 108插入手术部位的情况下,在手
术部位处可枢转部分110指向的区域(或 者如果省略可枢转部分110,则是在手术部位处轴108指向的区域),以允 许手术部位的视觉图像输出到显示器。又如,压力传感器142和温度传感 器144布置在可枢转部分110内可允许压力传感器142和温度传感器144分 别在发生冲洗和/或抽吸的感兴趣部位处,而不是在与之靠近但压力和/或温 度可能由于例如其距冲洗和/或抽吸的距离而不同的某些位置处,收集压力 数据和温度数据。压力数据对于在将射频(rf)能量施加到组织的外科手 术中监测可能特别重要,例如,以帮助确保安全施加rf能量。温度可类似 地对于在将rf能量施加到组织的外科手术中监测特别重要。
109.在一些具体实施中,关节镜100包括第一和第二惯性传感器146,其 中第一惯性传感器146定位在可枢转部分110处,并且第二惯性传感器146 布置在手持件120内(例如,完全或部分地设置在其中),或者布置在轴 108内(例如,完全或部分地设置在其中)靠近可枢转部分110。靠近可枢 转部分110提供第二惯性传感器146,无论第二惯性传感器146是定位在轴 108处还是在手持件120处,可通过在可在枢转点112处枢转的可枢转部分 110处以及在轴108(靠近枢转点112)或不相对于纵向轴线la枢转的手 持件120处收集取向数据来有利于关节镜的取向的确定。
110.关节镜100包括设置在光学传感器140远侧的透镜114。透镜114被构 造成通过防止手术部位处的液体和/或固体物质直接接触光学传感器140来 保护光学传感器140免受损坏。在一些具体实施中,透镜114可提供光学 特征,诸如放大以增强由光学传感器140收集的光学数据。
111.关节镜100包括设置在透镜114远侧的并且因此设置在光学传感器140 远侧的棱镜115。棱镜115被构造成为光学传感器140提供比在没有棱镜 115的情况下可实现的更大的视角。棱镜115位于轴108的可枢转部分110 处,这允许棱镜115与可枢转部分110和光学传感器140和附接到光学传 感器上的透镜114一起枢转。在示例性具体实施中,棱镜115成角度在约 30
°
至约70
°
的范围内。髋关节镜手术传统上涉及使用两个窥镜或其他图像 装置,一个具有固定的30
°
视角,并且另一个具有固定的70
°
视角。棱镜 115和可枢转部分110允许关节镜100提供30
°
视角和70
°
视角,使得可使 用一个装置代替两个装置,使得可在手术部位处释放空间以用于其他仪器 并且/或者提供更好的可视化机会并且/或者使得可减少在患者体内制造的切 口数量,因为无需针对两个不同的装置制造两个切口。在一些具体实施 中,省略了棱镜115,但是仍可利用关节镜100经由可枢转部分110的枢转 来实现约30
°
至约70
°
的角度范围。
112.光学传感器140的示例性具体实施包括可从加利福尼亚州圣克拉拉市 的omnivision technologies公司获得的omv7695传感器、oc01a10传感 器和oh0a10传感器,但是也可使用其他光学传感器。
113.手持件120可包括被构造成控制光学传感器140的一个或多个功能的 一个或多个图像控制致动器(例如,按钮、操纵杆等)。例如,手持件120 可包括图像控制致动器,该图像控制致动器被构造成被致动以使得光学传 感器140按需收集静态图像,例如,触发控制单元160以使得光学传感器 140收集图像并将所收集的数据传输到控制单元160。又如,手持件120可 包括图像控制致动器,该图像控制致动器被构造成被致动以使光学传感器 的图像数据收集过程打开和关闭,例如,触发控制单元160以使得光学传 感器140开始收集视频图像或使得光学传感器140停止收集视频图像。
114.在示例性具体实施中,移动致动器126被构造成当关节镜100的可枢 转部分110未枢转(或者如果省略了可枢转部分110)时指示棱镜115的角 度取向。如上所述,移动致动器126布置在手持件120上。移动致动器126 围绕手持件120的圆周的径向位置对应于当关节镜100的可枢转部分110 未枢转(或者如果省略了可枢转部分110)时,棱镜115成角度的方向。外 科医生或关节镜100的其他用户可因此能够查看定位在患者身体外的移动 致动器126,以知道定位在患者身体内的棱镜115的取向,这可帮助外科医 生或其他用户调整关节镜100的旋转位置和/或可枢转部分110的枢转位 置。
115.图8示出了关节镜医疗器具100的可枢转部分110的枢转的示例。可 枢转部分110在图8中示出为处于直列式位置,其中可枢转部分110未枢 转并且以附图标记110标记并且在图8中示出为处于枢转位置,其中可枢 转部分110在枢转点112处枢转并且以附图标记110'标记。图8中示出了仅 一个枢转位置,但是如本文所讨论,可枢转部分110的许多枢转位置是可 能的。
116.图8还示出了对应于可枢转部分110处于直列式位置(棱镜115以附 图标记115标记)时以及处于枢转位置(棱镜115以附图标记115'标记) 时的光学传感器140的视角。在可枢转部分110处于直列式位置的情况 下,光学传感器140具有视角va2,在该例示的具体实施中其为约90
°
,但 是考虑到光学传感器特定配置,其可为另一角度。棱镜115允许视角va2大于在没有棱镜115的情况下的可能视角。在没有棱镜115的情况下,光 学传感器140的视角将为较小的视角va1,在该例示的具体实施中其是约 30
°
,但是考虑到光学传感器特定配置,其可为另一角度。因此,棱镜115 被构造成增大光学传感器140的视角。在示例性具体实施中,棱镜115成 角度在约30
°
至约70
°
的范围内,这相应地增大了光学传感器的视角。在该 例示的具体实施中,棱镜115成角度为约60
°
,以便将光学传感器的视角增 大约60
°
,例如从约30
°
增大至约90
°
。
117.在可枢转部分110'处于枢转位置的情况下,光学传感器140仍具有从 在没有棱镜115'的情况下可实现的约30
°
的较小视角va1'增大的约90
°
的视 角va2'。通过将棱镜115布置在光学传感器140远侧并且在光学传感器上 方,结合可枢转部分110枢转的情况,光学传感器140可相对于纵向轴线 la成角度为约90
°
收集图像,并且在一些具体实施中,大于约90
°
。例 如,如在该例示的具体实施中,可枢转部分110'处于枢转位置,约90
°
的视 角va2'允许光学传感器140相对于纵向轴线la成角度大于约90
°
收集图 像。
118.再次参考图1和图2,光学传感器140、压力传感器142、温度传感器 144和惯性传感器146经由呈电缆148的形式的电连接器可操作地联接到控 制单元160。电缆148穿过轴108的内部管腔中的一个内部管腔并且穿过手 持件120到电缆组件106的第一电缆130,以允许如上所述的电力和数据传 递。
119.如图2所示,电缆130、132中的每个电缆可操作地联接到控制单元 160。控制单元160包括处理器162、存储器164、存储装置166和系统总 线168,该系统总线将控制单元160的处理器162、存储器164和存储装置 166互连。处理器162被配置为执行存储在存储器164中和/或存储装置166 上的指令以提供控制单元160的控制功能。在一些具体实施中,处理器162 是单线程处理器。在其他具体实施中,处理器162是多线程处理器。存储 器164被配置为存储信息并且是计算机可读介质,例如易失性存储单元或 非易失性存储单元。存储装置166被配置为向控制单元160提供海量存储 空间并且是计算机可读介质,例如软盘装置、
硬盘装置、光盘装置、磁带 装置、非易失性固态存储器等。在示例性具体实施中,存储器164被配置 为存储预编程指令,这些预编程指令被配置为由处理器162执行,并且存 储装置166被配置为存储所收集的传感器数据。如本文所讨论并且如图2 中的第一电缆130和电连接器148上的箭头所示,可向控制单元160提供 由传感器140、142、144、146收集的数据,处理器162可使得该数据存储 在存储装置166中。控制单元160还可被配置为经由电缆130、148向传感 器140、142、144、146中的一个或多个传感器提供指令,诸如向传感器140、142、144、146中的一个或多个传感器提供收集数据并将所收集的数 据提供给控制单元160的指令。
120.控制单元160可操作地联接到被配置为在其上显示信息的显示单元 172,例如,crt屏幕、lcd屏幕、触摸屏等。显示单元172经由电缆174 可操作地联接到控制单元的处理器162,以允许处理器162和显示单元172 彼此通信。图2中电缆174上的箭头示出了仅从控制单元160到显示单元 172的数据流,但是显示单元172可被配置为将数据传输到控制单元160, 该数据例如,错误信息、由用户经由显示单元172的用户界面(例如,按 钮、触摸屏等)输入的用户输入等。控制单元160被配置为例如使用处理 器162提供显示指令和数据以显示到显示单元172,诸如控制单元160经由 电缆174提供给显示单元172的显示来自光学传感器140的光学图像的指 令;控制单元160经由电缆174提供给显示单元172的显示由压力传感器 142收集的压力信息的指令;控制单元160经由电缆174提供给显示单元 172的显示由温度传感器144收集的温度信息的指令;控制单元160经由电 缆174提供给显示单元172的显示来自惯性传感器146的取向信息的指令 等。控制单元160可附加地或另选地被配置为与显示单元172无线通信, 而不是使用电缆174进行有线连接。在一些具体实施中,显示单元172和 控制单元160可以是同一计算机系统(例如,单个电子平板电脑、单个膝 上型计算机等)的部分。
121.控制单元160(例如,其处理器162)被配置为使用由惯性传感器146 收集的取向数据来确定光学传感器140的取向。在示例性具体实施中,由 惯性传感器146测量的取向数据包括角度取向数据和轴线取向数据。收集 角度取向数据和轴线取向数据可通过允许确定光学传感器的旋转,例如, 光学传感器140是否正在围绕x轴、y轴或z轴旋转,以及光学传感器的 平移,例如,光学传感器140是否正在沿着x轴、y轴或z轴平移,从而 有利于控制单元160准确确定光学传感器140的取向。
122.控制单元160被配置为如上所述接收来自光学传感器140的光学图像 数据和来自惯性传感器146的取向数据,并且可被配置为使用取向数据来 修改光学图像数据。修改包括使输出到显示单元172的光学图像旋转,以 便在手持件120的旋转期间和之后,例如,在手持件120围绕纵向轴线la 旋转期间和之后,将所显示的光学图像维持为期望取向。在示例性具体实 施中,期望取向是直立取向,但是也可以是另一个取向,诸如侧向。
123.如图2所示,多个输入致动器124经由电缆150可操作地联接到控制 单元160,该电缆可操作地联接到第一电缆130。输入致动器124与控制单 元160之间的连接允许外科医生或其他用户通过致动多个输入致动器124 中的选定的一个输入致动器—例如,在给定用户的手相对于手持件120并 且因此相对于输入致动器124的当前位置时输入致动器124中对用户而言 最容易接近的一个输入致动器—来向手术部位提供冲洗流体。输入致动器 124中的任何一个输入致动器的致动被配置为使得输入致动信号从致动输入 致动器124沿着
电缆150传输并且然后沿着第一电缆130传输到控制单元 160,例如,传输到其处理器162。响应于控制单元接收到输入致动信号, 控制单元160(例如,处理器162)被配置为使得激活信号沿着第三电缆 170(或沿着泵134与控制单元160之间的无线连接而不是沿着第三电缆 170)传输到泵134。泵134流体地联接到关节镜100外部的外部流体源 136。响应于接收到激活信号,泵134被配置为将冲洗流体从流体源136通 过第二电缆132泵送到关节镜100,并且具体地泵送到手持件120,并且然 后通过轴108的内部管腔中的一个内部管腔,并且从轴108离开到达手术 部位。在图2的例示的具体实施中,泵134在控制单元160的外部,但是 泵也可以与控制单元160集成。
124.泵134被配置为继续将流体从流体源136泵送到关节镜100,直到泵 134从控制单元160接收到停止信号。因此,流体可连续地提供给手术部 位。控制单元160被配置为响应于外科医生/用户释放所致动的输入致动器 124而使得停止信号传输到泵134。外科医生/用户释放所致动的输入致动器 124使输入信号停止从该输入致动器传输到控制单元160并且/或者使得停 用信号从去致动的输入致动器124传输到控制单元160,从而触发控制单元 160将停止信号传输到泵134。例如,当输入致动器124呈按钮的形式时, 外科医生或其他用户可按下按钮以使得冲洗流体流动,并且可释放被按下 的按钮以使得冲洗流体停止流动。又如,当输入致动器124呈操纵杆的形 式时,外科医生或其他用户可将操纵杆从第一位置移动到第二位置以使得 冲洗流体流动,并且可将操纵杆从第二位置移动回到第一位置以使得冲洗 流体停止流动。
125.在其他具体实施中,输入致动器124中的选定的一个输入致动器的第 一致动被配置为触发控制单元160将激活信号传输到泵134,并且输入致动 器124中的选定的一个输入致动器的第二致动(与输入致动器124以第一 致动被致动时相同或不同)被配置为触发控制单元160将停止信号传输到 泵134。因此,外科医生或其他用户无需连续地致动(例如,连续地保持按 钮、向操纵杆施加压力等),以将流体连续地泵送到手术部位,这可减少 在流体正在泵送到手术部位时的手疲劳和/或关节镜100的缓慢旋转。
126.图9示出了插入患者体内并到达手术部位10的关节镜医疗器具100。 在该例示的具体实施中,手术部位10位于患者的肩部,但是也可以位于其 他位置诸如髋部或膝盖。如图9所示,轴108通过患者皮肤中的切口关节 镜式插入,并且将医疗器具100的远侧部分定位在手术部位10处。光学传 感器140布置在轴108的可枢转部分110处,从而允许外科医生在显示单 元172上观察手术部位10。为了观察手术部位10的不同部分,操纵关节镜 100的外科医生或其他用户可使轴108在切口内倾斜,操纵关节镜100的外 科医生或其他用户可使手持件120和轴108(包括可枢转部分110)围绕纵 向轴线la旋转,并且/或者操纵关节镜100的外科医生或其他用户可通过 致动移动致动器126使可枢转部分110枢转。
127.如图9所示,辅助工具12可插入患者体内并到达手术部位10。在该例 示的具体实施中,辅助工具12是刮刀,但是也可使用其他辅助工具,诸如 第二关节镜。刮刀12包括抽吸导管14,该抽吸导管被构造成通过该抽吸导 管从外科手术部位10去除物质,诸如刮离的组织、刮离的骨和冲洗流体。 同一用户可通过用一只手来保持关节镜100(例如,其手持件120)并且用 另一只手来保持辅助工具12(例如,其柄部16),从而同时操纵关节镜 100和辅助工具12。
128.图10示出了操作关节镜医疗器具的一种示例性方法200。相对于图1 和图2的关节
镜医疗器具100描述了方法200,但是也可类似地使用本文描 述的关节镜医疗器具的其他具体实施。一般来说,方法200可用于执行关 节镜手术,其中利用关节镜医疗器具100到达手术部位,基于来自惯性传 感器146的取向数据来修改从光学传感器140输出的光学图像数据,并且 将所修改的光学图像输出到显示单元172,使得显示单元172以期望取向连 续地显示手术部位。
129.方法200包括通过用户诸如外科医生将轴108的远侧端部107a插入患 者体内并到达手术部位,从而利用关节镜医疗器具100到达手术部位202。 方法200还包括用户使手持件120围绕纵向轴线la旋转204,这又使轴 108(包括可枢转部分110,传感器140、142、144、146定位在该可枢转部 分处)旋转,同时将显示在显示单元172上的手术部位的图像维持为期望 取向204。为了将图像保持为期望取向,由控制单元160使用提供给控制单 元160的来自惯性传感器146的取向数据来修改在控制单元160处接收的 来自光学传感器140的光学图像数据。例如,当光学传感器140最初被激 活时,控制单元160使用来自惯性传感器146的取向数据来确定其中光学 传感器140直立取向的零旋转点。随着手持件120沿着纵向轴线la旋转, 控制单元160可基于所收集的取向数据来测量光学传感器140相对于零旋 转点的角度位置。在将手术部位的图像输出到显示器172之前,控制单元 160通过使图像围绕纵向轴线la旋转与光学传感器140相对于零旋转点的 角度位置(如由惯性传感器146收集的取向数据所指示的)相同的角度来 修改图像。随着光学图像数据的收集实时发生控制单元对光学图像数据的 修改,因为光学传感器140被配置为随着收集过程将所收集的光学图像数 据实时传输到控制单元160。惯性传感器146也被配置为将其所收集的取向 数据实时传输到控制单元160。因此,手持件120和轴108的旋转与所修改 的图像输出到显示单元172之间几乎没有延迟。
130.压力传感器142和温度传感器144还可被配置为随着其收集过程实时 传输其所分别收集的压力数据和温度数据,使得压力信息和温度信息可实 时显示在显示单元172上,以帮助向正在监测显示在显示单元172上的信 息的外科医生和/或其他医疗人员提供准确的、更新的信息。
131.图11a至图11c示出了手持件的旋转204和图像182在显示单元172 上维持为期望取向204的一个具体实施。为了便于说明和理解,图11a至 图11c中的图像182是笑脸符号,但是将在使用中原将是手术部位10的图 像。
132.如图11a所示,光学传感器140的角度位置ap布置成零旋转点zr, 例如,光学传感器角度位置ap和零旋转点zr对准。这种相对定位对应于 光学传感器140初始激活时,例如,当在外科手术期间首次将电力提供给 光学传感器140时和/或当在外科手术期间控制单元160首次使得光学传感 器140开始收集光学数据时。当光学传感器140的角度位置ap与零旋转点zr对准时,控制单元160无需修改所收集的光学图像,因为图像数据在收 集时已处于期望取向。零旋转点zr被描绘为显示单元172上的参考图像 180,在该显示单元上还示出光学图像182。在示例性具体实施中,图像 180显示在显示单元172上以向外科医生和/或其他医疗人员指示光学传感 器140从零旋转点zr旋转的程度。然而,在一些具体实施中,参考图像 180不显示在显示单元172上,这可帮助减少显示单元172上的杂乱。在该 例示的具体实施中,参考图像180是星形,但是也可具有其他形式,诸如 与飞行仪器上的地平指示器类似的地平指示器(人工地平仪)、圆形、三 角形、文本(例如,“零”、“零点”、“参考”、“zr”等)、正
方 形、小屋(家)图标等。在该例示的具体实施中,期望取向是直立取向, 如直立取向、眼睛在顶部并且嘴巴在底部的笑脸符号所指示,但是其他取 向也是可能的,诸如右侧取向(例如,眼睛在右侧并且嘴巴在左侧)或左 侧取向(例如,眼睛在左侧并且嘴巴在右侧)。
133.当手持件120从图11a的位置围绕纵向轴线la在旋转方向rd上旋 转时,光学传感器140也围绕纵向轴线la旋转。在图11a的例示的具体 实施中,旋转方向rd为顺时针,但是旋转方向rd也可为逆时针。使光学 传感器140在旋转方向rd上旋转使得光学传感器140的角度位置ap不再 与零旋转位置zr对准,从而产生光学传感器140相对于零旋转位置zr的 角度位移ad,如图11b所示。控制单元160通过由惯性传感器146收集并 传输到控制单元160的取向数据来通知角度位移ad。图11b示出了角度位 移ad为约90
°
,例如,零旋转点zr与光学传感器140的角度位置ap之 间为约90
°
的角度,但是其他角度位移ad也是可能的。控制单元160基于 来自惯性传感器146的取向数据(例如,基于角度位移ad)来修改从光学 传感器140传输到控制单元160的光学图像数据。图11b示出了显示单元 172上的所修改的图像182和参考图像180。尽管由参考图像180表示的零 旋转点zr在显示单元172上从图11a中所示其初始位置旋转了约90
°
,但 是与图11a中所示的图像182相比,图像182保持为期望取向,其中角度 位移ad为0
°
。
134.当手持件120从图11b的位置围绕纵向轴线la在旋转方向rd上进 一步旋转时,控制单元160相应地修改图像182以显示在显示单元172 上。图11c示出了角度位移ad为约180
°
,例如,零旋转点zr与光学传 感器140的角度位置ap之间为约180
°
的角度,但是如上所述其他角度位 移ad也是可能的。尽管由参考图像180表示的零旋转点zr在显示单元 172上从图11a中所示其初始位置旋转了约180
°
,并且在显示单元172上 从图11b所示其第一中间位置旋转了约90
°
,但是与图11a和图11b中所 示的图像182相比,图11c中所示处于其第二中间位置的图像182保持为 期望取向。
135.控制单元160被配置为随着关节镜100旋转而连续地更新显示单元 172,使得图像182保持为期望取向并且参考图像180(如果其存在于显示 单元172上)相对于图像182准确地定位。控制单元160还被配置为以其 他方式连续地更新显示单元172,同时在显示单元172上将图像182维持为 期望取向并在显示单元172上将参考图像180维持在对于图像182的同一 相对位置中,诸如通过在放大时、在缩小时、在不同元素移入和移出光学 传感器的视野时等情况下更新图像182。
136.再次参考图10,方法200还包括使用关节镜100的温度传感器144来 测量手术部位10的温度206,以及使用关节镜100的压力传感器142来测 量手术部位10的压力208。如上所述,将温度测量结果和压力测量结果传 输到控制单元160,并且控制单元可将压力信息和温度信息输出到显示单元 172以在其上实时显示。
137.图10中所示的方法200示出了在温度测量204之前发生关节镜的旋转 202并且在压力测量206之前发生温度测量值206,但是旋转202、温度测 量204和压力测量206可能以其他顺序发生,可能其中同一个动作(例 如,旋转202、温度测量204或压力测量206)在其他两个动作202、204、 206中的任一个动作发生之前连续发生多于一次,并且可能在外科手术的整 个执行过程中各自发生多次。
138.利用关节镜医疗器具100到达手术部位202可包括使用插入工具。通 常,插入工具可有利于将关节镜医疗器具100安全且简单地引导到手术部 位。插入工具可具有多种构
型。
139.图12a和图12b示出了插入工具600的一个具体实施,该插入工具被 构造成有利于将关节镜(例如,关节镜医疗器具100或本文描述的其他关 节镜医疗器具)插入手术部位中。插入工具600包括闭塞器602和可释放 地固定到闭塞器602的引导构件604(在本文中也称为“滑动件”)。闭塞 器602包括柄部603和从柄部603向远侧延伸的细长轴606。细长轴606包 括渐缩远侧端部607a。柄部603被构造成接收在向远侧方向上施加到其上 的插入力,例如通过手或通过抵靠柄部603向远侧推动的工具,以将插入 工具600插入患者身体中并到达身体中的手术部位。轴的远侧端部607a的 渐缩形状被构造成通过随着插入工具600推进穿过患者皮肤中的预形成的 切口(例如,利用手术刀或其他切割工具在皮肤中切割的切口)而加宽切 口,从而辅助插入工具600插入患者的身体中。在其他具体实施中,渐缩 远侧端部607a可包括尖锐边缘,该尖锐边缘被构造成在患者皮肤中形成切 口,并且然后随着插入工具600推进穿过切口而加宽切口。
140.滑动件604包括沿着其长度延伸的引导通道610。引导通道610沿着滑 动件604的外表面。闭塞器602被构造成可释放地安置在引导通道610中 以可释放地固定到滑动件604上。闭塞器602和引导通道610的尺寸和形 状被设定成使得包括细长轴606和柄部603的闭塞器602被构造成以摩擦 配合安置在引导通道610中。至少滑动件604与细长轴606之间的摩擦配 合可帮助确保在插入工具600插入患者的身体中并到达患者体内的手术部 位期间闭塞器602和滑动件604保持配合在一起。柄部603被构造成安置 在引导通道610中以便靠近滑动件604定位,如图12a和图12b所示,这 可帮助确保当插入工具600向远侧推进到患者的身体中并到达手术部位时 滑动件604和闭塞器602相对于彼此保持在固定位置。闭塞器602被构造 成通过在闭塞器602上(例如通过柄部603)向近侧拉动以将闭塞器602滑 出引导通道610而从滑动件604释放。
141.在使用具有关节镜(诸如关节镜100或本文所述的其他关节镜)的插 入工具600的方法的一个具体实施中,一旦插入工具600推进到手术部位 处的期望位置,就从引导构件604释放闭塞器602。闭塞器602从手术部位 移除并从患者的身体中移除,例如,通过向近侧拉动柄部603以使闭塞器 602移动穿过并移出切口。在闭塞器的移除期间细长轴606在引导通道610 内向近侧滑动。在闭塞器602已从引导通道610释放并从手术部位和患者 的身体中移除之后,引导构件604保持定位在切口中并且在手术部位处。 引导构件604的长度被设定成随着引导构件604延伸穿过切口到达手术部 位而允许引导构件604的近侧部分定位在患者的身体外并且引导构件604 的远侧部分定位在患者的身体内。然后,关节镜医疗器具100或本文所述 的其他关节镜的轴108可安置在引导通道610中并在引导通道内向远侧滑 动以到达手术部位。随后,可从引导构件604释放关节镜100,类似于上面 关于从引导通道610释放插入构件602所讨论的。关节镜100和/或一个或 多个其他工具可安置在引导通道610中并滑动以到达手术部位。引导构件 604允许移除并重新插入关节镜100和/或其他工具而无需制造新切口,因 为引导构件604将保持切口部分地打开。
142.如上所述,在示例性具体实施中,连接器(无论是单个连接器还是多 个连接器)被构造成通过连接到被构造成提供电功能、光学功能和流体功 能的多根电缆来制造用于关节镜的所有电连接、光学连接和流体连接。该 多根电缆还被构造成可操作地联接到控制单元。连接器位于该多根电缆的 远侧端部处,并且控制单元位于该多根电缆的近侧端部处。
图1和图2示 出了一个此类具体实施,其中连接器129位于电缆组件106的远侧端部 处,该电缆组件包括第一电缆130和第二电缆132,并且控制单元160位于 电缆组件106的近侧端部处。图1和图2示出了位于电缆组件106的远侧端 部处的连接器129,并且图2示出了可操作地联接到控制单元160的电缆组 件106的近侧端部。
143.该多根电缆可被构造成以各种方式可操作地联接到控制单元。图13示 出了被构造成可操作地联接到控制单元的电缆连接器190的一个具体实 施。电缆连接器190位于电缆组件191的近侧端部处并且被构造成可操作 地联接到控制单元,例如控制单元700(下文进一步讨论)或本文描述的控 制单元的其他具体实施。电缆组件191一般以类似于图1和图2的电缆组 件106的方式被构造和使用。在该例示的具体实施中,电缆组件191包括 第一电缆193和第二电缆195。第一电缆193包括第一导管,该第一导管包 括电线并且以类似于上文关于电缆组件106的第一电缆130所讨论的第一 导管的方式被构造和使用。第二电缆195包括第二导管,该第二导管被构 造成从流体源提供冲洗流体并且以类似于上文关于电缆组件106的第二电 缆132的第二导管所讨论的方式被构造和使用。在该例示的具体实施中, 第二电缆195不包括用于抽吸的第三导管。
144.电缆连接器190包括电连接器192和流体连接器194。电连接器192被 构造成可操作地联接到控制单元的对应电连接器,并且流体连接器194被 构造成可操作地联接到控制单元的对应流体连接器。图14示出了此类控制 单元电连接器和流体连接器的一个具体实施。电连接器192被构造成在控 制单元700的电缆端口704处可操作地联接到对应电连接器702,在下文进 一步讨论。在电连接器192可操作地联接到控制单元的电连接器702的情 况下,控制单元700可经由第一电缆130向关节镜100提供电力,并且数 据可经由第一电缆191从关节镜100传送到控制单元700和/或从控制单元 700传送到关节镜100。流体连接器194被构造成在控制单元700的电缆端 口704处可操作地联接到对应流体连接器706。在流体连接器194可操作地 联接到控制单元的流体连接器706的情况下,控制单元700可经由第二电 缆193提供流体冲洗。
145.电缆连接器190还包括固定构件196,该固定构件被构造成有利于电 缆连接器190与控制单元700的牢固、可释放的连接。如在图14的具体实 施中,控制单元700可包括电缆端口704处的对应固定构件708,该固定构 件被构造成牢固、可释放地接合固定构件196。电缆连接器190和控制单元 700中的一者的固定构件196、708可包括凸构件,例如,销、尖头等,并 且电缆连接器190和控制单元700中的另一者的固定构件196、708可包括 尺寸和形状相应设定的凹构件,例如,孔、盲孔等。
146.被构造成可释放地连接到电缆连接器190的控制单元可具有各种构 型,如上所述。图2示意性地示出了此类控制单元160的一个具体实施。 图15和图16的控制单元700是控制单元160的一个具体实施。
147.在图15和图16的示例性具体实施中,控制单元700包括泵,但是在 其他具体实施中,泵可以是被构造成可操作地联接到控制单元的独立单 元,诸如图2所示的泵134和控制单元160。在该例示的具体实施中,控制 单元700的泵包括蠕动泵,但是泵也可具有其他构型。控制单元700的泵 通常以类似于图2的泵134的方式被构造和使用。控制单元700被构造成 可释放地联接到仓(在本文中也称为“盒”),该仓被构造成可操作地联 接到控制单元700的泵。图16示出了此类仓710的一个具体实施。控制单 元700包括仓保持器712,该仓保
持器被构造成将仓710可释放地安置在其 中。在该例示的具体实施中,仓710和仓保持器712具有互补的矩形形 状,但是它们也可具有其他互补形状。图16示出了尚未安置在仓保持器 712中的仓710。箭头714示出了仓710插入到仓保持器712中的方向。仓710一旦安置在仓保持器712中,就被构造成在与箭头714的方向相反的方 向上从仓保持器移除。
148.管道716从仓710延伸并且被构造成联接到流体源,该流体源通常以 类似于图2的流体源136的方式被构造和使用。在盒710可操作地联接到 控制单元700的情况下,控制单元700的泵被构造成将流体从流体源通过 管道716泵送到流体连接器706,并且从控制单元700离开通过流体连接器 706泵送到电缆组件106的流体连接器194中,流体通过该流体连接器被泵 送到第二电缆193,例如第二电缆的第二导管中,以用于从关节镜100输 出。盒710可具有多种构型。盒的示例性具体实施进一步描述于2010年12 月28日发布的标题为“cassette for irrigation or aspiration machine forendoscopy”的美国专利第7,857,792号中,该美国专利据此全文以引用方 式并入。
149.管道716与仓710的出口端口718流体连通。控制单元700包括入口 端口(在图16中被遮挡),该入口端口被构造成以流体密封的关系可操作 地联接到出口端口718。在仓710联接到控制单元700的情况下,出口端口 718被构造成与控制单元的流体连接器706流体连通。流体可因此从流体源 通过管道716泵送到仓710中,从仓710离开并通过出口端口718泵送到控 制单元700中,并且通过流体连接器706从控制单元700中泵出。
150.仓710被构造成一次性的(例如,作为医疗垃圾被处理掉)或完全或 部分再循环的。因此,仓710可在单次使用之后,例如,在外科手术中患 者使用之后被处理掉。控制单元700被构造成可重复使用的,并且因此可 在各自对不同患者执行的多个外科手术中使用。控制单元700包括元件诸 如处理器、存储器、泵等,这些元件通常比仓710的元件(例如,外壳 体、管道716等)更昂贵和/或更复杂。因此,控制单元700可重复使用可 允许控制单元的更昂贵和/或更复杂的元件重复使用,而不是必须在单次使 用之后被处理掉。控制单元700被构造成可释放地联接到仓可允许控制单 元700联接到各种不同的仓,诸如,各自被构造成可操作地联接到不同类 型的流体源的仓,各自包括不同尺寸管道的仓等,从而允许外科医生和/或 其他医疗人员选择最适合于其中将使用仓的特定外科手术的仓。
151.图17和图18示出了被构造成可操作地联接到电缆连接器的控制单元 800的另一个具体实施。控制单元800是图2的控制单元160的另一个具体 实施,并且通常以类似于图15和图16的控制单元700的方式被构造和使 用。
152.图15和图16的控制单元700被构造成背面加载单元,其中仓(例 如,仓710)被构造成在控制单元700的背面联接到控制单元700。通常期 望在控制单元700的使用期间可接近并可视化地观察控制单元700的正面 —电缆组件(例如,电缆组件106)从该正面延伸—例如,以有利于电缆组 件与控制单元700的连接和断开,并且有利于用户观察控制单元700的正 面上的用户界面720,该用户界面被配置为接收用户输入和/或向用户显示 信息。控制单元700背面加载可通过使仓710和管道716位于控制单元700 的与电缆端口704和用户界面相对的侧面上,从而有利于这种可及性和视 觉观察。图17和图18的控制单元800被构造成侧面加载单元,其中仓被 构造成在控制单元800的一侧联接到控制单元800。在例示的具体实施中, 该侧被示出为控制单元800的右侧,但是也可相反地在左侧。控制单元800 侧面加载仍可允许控制单元800的可及性和视觉观察,同时在用户在外科 手术之前、期间和/或
之后可更容易到达的位置处提供控制单元的仓保持器 802。控制单元可能在具有背表面的推车、搁板或其他支撑构件上使用,控 制单元可能背面邻接墙壁或其背面面向墙壁。控制单元的背面可因此在至 少一些情况下比控制单元的侧面对用户而言更难以到达。控制单元800侧 面加装载可因此通过处于比背面加载控制单元对用户而言更容易接近的位 置而易于仓与控制单元800的连接和断开。
153.控制单元800包括仓保持器802,该仓保持器通常以类似于控制单元 700的仓保持器712的方式被构造和使用。图18中示出了被构造成通过联 接到仓保持器802而可操作地联接到控制单元800的仓804的一个具体实 施。仓804通常以类似于图16的仓710的方式被构造和使用。如上所述, 仓的示例性具体实施进一步描述于2010年12月28日发布的标题为
ꢀ“
cassette for irrigation or aspiration machine for endoscopy”的美国专利 第7,857,792号中。
154.在图17和图18的例示的具体实施中,被构造成可操作地联接到电缆 连接器的电缆端口806由控制单元800的第一电缆端口808和仓804的第二 电缆端口810限定。在仓804可操作地联接到控制单元806的情况下,例 如,在仓保持器802接收到仓804的情况下,第一电缆端口808和第二电 缆端口810彼此对准,以形成被构造成可释放地联接到电缆连接器的电缆 端口806。
155.图18示出了被构造成可操作地联接到电缆端口806的电缆连接器812 的一个具体实施。电缆连接器812位于电缆组件814的近侧端部处并且被 构造成可操作地联接到控制单元800或本文描述的控制单元的其他具体实 施。电缆组件814一般以类似于图1和图2的电缆组件106的方式被构造和 使用。在该例示的具体实施中,电缆组件814包括第一电缆816和第二电 缆818。第一电缆816包括第一导管,该第一导管包括电线并且以类似于上 文关于电缆组件106的第一电缆130所讨论的第一导管的方式被构造和使 用。第二电缆818包括第二导管,该第二导管被构造成从流体源提供冲洗 流体并且以类似于上文关于电缆组件106的第二电缆132的第二导管所讨 论的方式被构造和使用。在该例示的具体实施中,第二电缆818不包括用 于抽吸的第三导管。
156.电缆连接器812包括电连接器(在图18中被遮挡),该电连接器以类 似于图13的电连接器192的方式被构造和使用;包括流体连接器(在图18 中被遮挡),该流体连接器以类似于图13的流体连接器194的方式被构造 和使用;并且包括固定构件(在图18中被遮挡),该固定构件以类似于图 13的固定构件196的方式被构造和使用。在电连接器812的电连接器可操 作地联接到控制单元的电连接器(在图18中被遮挡)的情况下,控制单元 800可经由第一电缆816向关节镜提供电力,并且数据可经由第一电缆816 从关节镜传送到控制单元800和/或从控制单元800传送到关节镜。在电缆 连接器812的流体连接器可操作地联接到控制单元的流体连接器(在图18 中被遮挡)的情况下,控制单元800可经由第二电缆818提供流体冲洗。 如在图14的具体实施中,电缆端口806可包括对应固定构件(在图18中 被遮挡),该固定构件被构造成牢固、可释放地接合电缆连接器812的固 定构件。
157.在图17和图18的具体实施中,控制单元800包括泵820,但是在其他 具体实施中,泵可以是被构造成可操作地联接到控制单元的独立单元,诸 如图2所示的泵134和控制单元160。在该例示的具体实施中,泵820包括 第一蠕动泵822和第二蠕动泵824,但是泵也可具有其他构型。泵820通常 以类似于图2的泵134的方式被构造和使用。
machine for endoscopy”的 美国专利第7,857,792号中。
163.在图19的例示的具体实施中,当联接到控制单元800时,关节镜的电 缆组件不可操作地联接到由控制单元800和仓904限定的电缆端口。相 反,包括第一电缆914和第二电缆916的电缆组件912从仓904延伸。电缆 组件912被构造成可操作地联接到关节镜918。关节镜918以类似于图1和 图2的关节镜100的方式被构造和使用。在该例示的具体实施中,关节镜 918被构造成可释放地联接到电缆组件912,但在其他具体实施中,关节镜 可固定地联接到电缆组件912。第一电缆914和第二电缆916以类似于图1 和图2的第一电缆130和第二电缆132的方式被构造和使用。第一电缆914 包括第一导管,该第一导管包括电线并且以类似于上文关于电缆组件106 的第一电缆130所讨论的第一导管的方式被构造和使用。第二电缆916包 括第二导管,该第二导管被构造成从流体源提供冲洗流体并且以类似于上 文关于电缆组件106的第二电缆132的第二导管所讨论的方式被构造和使 用。在该例示的具体实施中,第二电缆916不包括用于抽吸的第三导管。 相反,如上所述,抽吸管道930被构造成经由外科工具838在手术部位处 提供抽吸功能。
164.本文所公开的装置可被设计成在单次使用之后废弃,或者其可被设计 成多次使用。然而无论是哪种情况,该装置都可在至少使用一次之后经过 修复再行使用。修整可包括拆卸装置、之后清洁或替换特定零件以及后续 重新组装步骤的任意组合。具体地,该装置可拆卸,而且可以任意组合选 择性地替换或移除装置的任意数目的特定零件或部件。在清洁和/或更换特 定部件时,装置可在至少一次使用之后经过修复再行使用。修整可包括拆 卸装置、之后清洁或替换特定零件以及后续重新组装步骤的任意组合。具 体地,该装置可拆卸,而且可以任意组合选择性地替换或移除装置的任意 数目的特定零件或部件。在清洁和/或替换特定部件后,可对该装置进行重 新组装,以便随后在修复设施处使用或就在外科手术之前由手术团队使 用。本领域的技术人员将会理解,修整装置可利用各种技术来进行拆卸、 清洁/替换和重新组装。此类技术的使用以及所得的修复装置均在本技术的 范围内。
165.本领域的技术人员基于上述实施方案将理解所述关节镜医疗器具和组 件及方法的其他特征和优点。因此,本公开不应受到已具体示出和描述内 容的限制,除非所附权利要求有所指示。本文引用的所有出版物和参考文 献全文明确地以引用方式并入本文。
166.已在上文在本文提供的整体公开内容的上下文中仅以举例的方式描述 了本公开。应当理解,在不脱离本公开的总体范围的情况下,可以在权利 要求书的实质和范围内进行修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。