1.本实用新型涉及机器人技术领域,具体是一种灾后救援用机器人。
背景技术:
2.我国是世界上地质灾害特别严重的国家之一,地质灾害种类多、危害大,具有区域性和群发性、分布范围广、持久性和周期性特点。
3.灾难的发生往往伴随这房屋的倒塌和路面的损坏,在受灾地区有很多不确定的因素,而不确定的因素会给救援人员带来极大的困难,现在对于受灾区的救援往往会先派出勘探机器人进行勘探,而传统的勘探机器人都是履带式或者车轮式的,此种类型的机器人由于采用了履带或者车轮作为移动方式,所以导致此种类型的机器人的体积较大,对于一些空间狭小的地方无法勘探,而且现有的机器人拍摄角度有限,当机器人进入狭小空间后,救援人员无法准确的找到机器人,容易错过救援时间。
技术实现要素:
4.本实用新型的目的在于提供一种灾后救援用机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
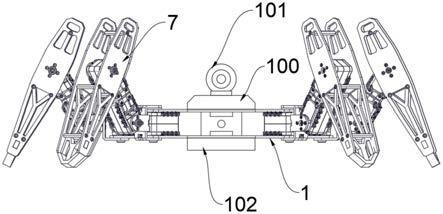
6.一种灾后救援用机器人,包括机身,所述机身的左右两端均固定连接有若干连接架,所述连接架内均设有第一舵机,若干所述连接架上均活动连接有连接件,所述连接件与第一舵机的输出轴连接,所述连接件远离连接架的一端设有第二舵机,所述第二舵机远离连接件的一端活动连接有支撑腿,所述支撑腿与第二舵机的输出轴连接,所述机身的下端固定连接有标记装置。
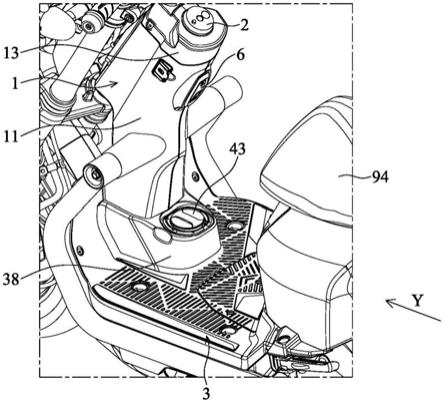
7.作为本实用新型进一步的方案,所述标记装置包括标记盒,所述标记盒的内部卡接网板。
8.作为本实用新型再进一步的方案,所述标记盒的内部底端固定连接有第一电机,所述第一电机的输出轴上固定连接有刮板。
9.作为本实用新型再进一步的方案,所述标记盒的上端卡接有固定框,所述固定框的内部固定连接有保护壳,所述保护壳的内部转动连接有收卷杆,所述收卷杆的一端设有第二电机,所述第二电机位于固定框的内部。
10.作为本实用新型再进一步的方案,所述收卷杆上缠绕有遮挡布,所述遮挡布的起始端固定连接有拉杆,所述拉杆与固定框滑动连接。
11.作为本实用新型再进一步的方案,所述固定框的前后内部上均开设有滑槽,所述拉杆的前后两端均位于滑槽内,所述滑槽的内部设有弹簧,所述弹簧的一端与固定框连接,另一端与拉杆连接。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型使用时,通过遥控器控制第一舵机和第二舵机,让第一舵机和第二
舵机相互配合从而使机器人可在路面上行走,进行环境的勘察,通过多个支撑腿带动机身在路面上行走,使得机器人可适应不同的地形,从而增加机器人的实用性。
14.2、本实用新型使用时,当机器人在进行救援勘探前先拆除固定框和网板,向标记盒内加入带有气味的彩色粉末,再将机器人放到需要搜索的区域,然后开启第二电机带动收卷杆转动,将遮挡布缠绕在收卷杆上,遮挡布在缠绕的过程中会拉动拉杆向靠近保护壳的方向移动,拉杆在移动的过程中会压缩滑槽内的弹簧,当拉杆移动到合适位置后标记盒内的粉末会从标记盒内掉落到地面上,机器人在行走的过程中粉末会标记出机器人的行走路线,从而方便救援人员对机器人发现的目标进行救援。
附图说明
15.图1为一种灾后救援用机器人的结构示意图。
16.图2为一种灾后救援用机器人的俯视图。
17.图3为一种灾后救援用机器人的立体图。
18.图4为一种灾后救援用机器人中连接件的立体图。
19.图5为一种灾后救援用机器人中标记装置的拆分图。
20.图6为一种灾后救援用机器人中固定框与遮挡布的拆分图。
21.图中:1、机身;3、连接架;4、第一舵机;5、连接件;6、第二舵机;7、支撑腿;100、控制箱;101、摄像探头;102、标记盒;103、网板;104、固定框;105、第一电机;106、刮板;107、滑槽;108、保护壳;109、第二电机;110、遮挡布;111、拉杆。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.实施例一:
24.请参阅图1~4,本实用新型实施例中,一种灾后救援用机器人,包括机身1,所述机身1的上端固定连接有控制箱100,所述控制箱100的内部设有蓄电池,所述控制箱100的上端连接有摄像探头101,所述机身1的左右两端均固定连接有若干连接架3,所述连接架3的数量设置为六个,所述机身1的一侧各有三个连接架3,所述连接架3与机身1为一体形成,所述连接架3内均设有第一舵机4,若干所述连接架3上均活动连接有连接件5,所述连接件5由两“凵”形的塑料零件相互垂直连接而成,所述连接件5与第一舵机4的输出轴连接,所述连接件5远离连接架3的一端设有第二舵机6,所述第二舵机6远离连接件5的一端活动连接有支撑腿7,所述支撑腿7与第二舵机6的输出轴连接,所述机身1的下端固定连接有标记装置。
25.实施例二:
26.请参阅图5、6,结合实施例1的基础,所述标记装置包括标记盒102,所述标记盒102的内部卡接网板103,所述网板103上设有若干贯穿孔,所述标记盒102的内部底端固定连接有第一电机105,所述第一电机105的输出轴上固定连接有刮板106,所述刮板106接近网板103带不和网板103接触,所述标记盒102的上端卡接有固定框104,所述固定框104为铁质材
料制成,所述固定框104的内部固定连接有保护壳108,所述保护壳108的内部转动连接有收卷杆,所述收卷杆的一端设有第二电机109,所述第二电机109位于固定框104的内部,所述收卷杆上缠绕有遮挡布110,所述遮挡布110的起始端固定连接有拉杆111,所述拉杆111具有磁性,拉杆111可以吸附铁制品,所述拉杆111与固定框104滑动连接,所述固定框104的前后内部上均开设有滑槽107,所述拉杆111的前后两端均位于滑槽107内,所述滑槽107的内部设有弹簧,所述弹簧的一端与固定框104连接,另一端与拉杆111连接,所述标记装置与机身1连接后固定框104的位置位于最下端。
27.本实用新型的工作原理是:
28.本实用新型使用时,通过控制第一舵机4和第二舵机6,让第一舵机4和第二舵机6相互配合从而使机器人可在路面上行走,进行环境的勘察,通过多个支撑腿7带动机身1在路面上行走,使得机器人可适应不同的地形,从而增加机器人的实用性;
29.当机器人在进行救援勘探前先拆除固定框104和网板103,向标记盒102内加入带有气味的彩色粉末(彩色粉末可以是加过色素的面粉,在面粉内加入香料),再将机器人放到需要搜索的区域,然后开启第二电机109带动收卷杆转动,将遮挡布110缠绕在收卷杆上,遮挡布110在缠绕的过程中会拉动拉杆111向靠近保护壳108的方向移动,拉杆111在移动的过程中会压缩滑槽107内的弹簧,当拉杆111移动到合适位置后标记盒102内的粉末会从标记盒102内掉落到地面上,机器人在行走的过程中粉末会标记出机器人的行走路线,从而方便救援人员对机器人发现的目标进行救援。
30.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。