1.本技术涉及食品设备领域,尤其是涉及一种超声波清洗机。
背景技术:
2.长期以来,在食品工业领域,喷射冲洗一直是主流方法,近年来越来越多地考虑消费者食品安全,人们要求在食品工业导入超声波清洗机这一清洗技术,用于清洗食品制造机器、零部件的清洗以及部分食品等。
3.相关技术中的超声波清洗机包括壳体、超声波发生装置和清洗篮,壳体内开设有清洗槽,清洗篮挂设在清洗槽内,清洗槽内容纳有清洗液,超声波发生装置设置于清洗槽内用于发出超声波能量。将清洗物放置于清洗篮内,清洗物沉浸在清洗液中,超声波发生装置发出超声波,超声波通过清洗液传递能量,实现对清洗物的清洗。
4.但是,当清洗物上的杂质较多时,如肉屑等,在取出清洗物时,清洗物上可能还留有杂质。
技术实现要素:
5.为了实现对清洗物的全面清洗,本技术提供一种超声波清洗机。
6.本技术提供的一种超声波清洗机,采用如下的技术方案:
7.一种超声波清洗机,包括壳体、超声波发生装置、清洗篮和储液箱,还包括喷头、泵体、第二控制模块和液位传感器;壳体下端连通设置有排水管,排水管上设置有阀门,喷头通过泵体与储液箱连通;
8.所述第二控制模块,用于接收二次启动指令,根据所述二次启动指令控制阀门在预设的第二时间段内打开,以及控制液位传感器在所述第二时间段内工作;
9.所述液位传感器用于检测清洗槽内的液位高度并输出当前液位信息;
10.所述第二控制模块,还用于在当前液位信息小于基准液位信息时,输出动作指令;
11.所述泵体接收动作指令工作。
12.通过采用上述技术方案,在超声波发生装置通过清洗液对清洗物进行初步清洗后,根据输入的二次启动指令,控制阀门开启,将杂质较多的清洗液排出,当清洗液的液位高度低于基准高度时,说明清洗物此时已经露出原清洗液,此时泵体工作,通过喷头对清洗物再次清洗,达到了对清洗物的全面清洗的效果。
13.可选的,所述第二控制模块,还用于在当前液位信息大于等于基准液位信息时,输出停机指令,所述泵体接收停机指令停机。
14.可选的,所述清洗机还包括摄像头和显示屏,摄像头安装于壳体内,摄像头用于采集清洗槽内的实时图像;显示屏设置于壳体外侧且连接于摄像头,接收实时图像并显示。
15.通过采用上述技术方案,通过图像采集装置和显示屏,便于工作人员实时观察清洗过程。
16.可选的,所述第二控制模块接收阀门的开关状态信息,显示屏连接于第二控制模
块并显示所述开关状态信息。
17.通过采用上述技术方案,通过显示屏显示阀门的开关状态,便于在工作人员加入清洗液时提示工作人员阀门是否关闭。
18.可选的,所述壳体内设置有风机,风机的进风口连通于大气,风机的出风口朝向壳体内。
19.通过采用上述技术方案,通过风机对清洗后的的清洗物和清洗槽进行风干。
20.可选的,所述喷头沿清洗槽内壁的周向设置多个且喷头的方向倾斜向下设置。
21.通过采用上述技术方案,通过设置多个喷头,实现对清洗物的全面清洗。
22.可选的,所述壳体的边沿上设置有压力传感器,清洗篮的边沿搭设在压力传感器上,压力传感器用于检测清洗篮以及清洗篮内载物的总重量并输出重量信息;
23.所述第二控制模块还用于,接收重量信息,在所述重量信息减小至预设的基准重量信息时,生成复位指令;
24.所述阀门接收复位指令关闭。
25.通过采用上述技术方案,所述重量信息减小至基准重量信息时,表征操作者将清洗物从清洗篮中取出,此时生成复位指令,控制阀门关闭。
26.可选的,所述清洗机内还设置有紫外灯。
27.通过采用上述技术方案,通过紫外灯对清洗槽进行杀菌,以避免上一阶段清洗的杂质对下一阶段的清洗物造成影响。
28.综上所述,本技术包括以下至少一种有益技术效果:通过设置喷头、泵体、第二控制模块和液位传感器,在超声波发生装置通过清洗液对清洗物进行初步清洗后,根据输入的二次启动指令,控制阀门开启,将杂质较多的清洗液排出,当清洗液的液位高度低于基准高度时,说明清洗物此时已经露出原清洗液,此时泵体工作,通过喷头对清洗物再次清洗,达到了对清洗物的全面清洗的效果。
附图说明
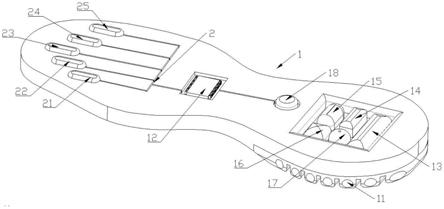
29.图1是本技术实施例超声波清洗机的整体示意图。
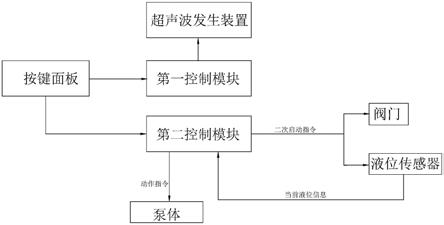
30.图2是本技术实施例第二控制模块的控制示意图。
31.图3是摄像头和显示显示屏的控制示意图。
32.图4是本技术实施例第二控制模块的控制阀门关闭的示意图。
33.附图标记说明:
34.1、壳体;111、清洗槽;112、液位传感器;2、超声波发生装置;3、清洗篮;4、储液箱;5、喷头;51、泵体;52、排水管;53、阀门;6、摄像头;7、风机;8、压力传感器;9、紫外灯。
具体实施方式
35.以下结合附图1-4对本技术作进一步详细说明。
36.本技术实施例公开一种超声波清洗机。参照图1和图2,包括壳体1、超声波发生装置2、清洗篮3、储液箱4和第一控制模块,壳体1内开设有清洗槽111,清洗篮3挂设在壳体1的边沿上,超声波发生装置2连接于第一控制模块,第一控制模块连接有按键面板,用户根据按键面板上相应的操作按键输入控制指令,超声波发生装置2接收控制指令并在第一预设
时间段内工作,实现第一阶段的清洗。
37.当清洗物上的杂质较多时,经过第一阶段清洗后,清洗液内杂质较多,将清洗物从清洗液内取出时,清洗物上可能还会留有部分杂质,为了便于对清洗物进行全面清洗,本技术实施例的超声波清洗机还包括喷头5、泵体51、第二控制模块、液位传感器112和紫外灯9;壳体1下端连通设置有排水管52,排水管52上设置有阀门53,喷头5通过泵体51与储液箱4连通;阀门53为电磁阀,喷头5沿清洗槽111内壁的周向设置多个且喷头5的方向倾斜向下设置;紫外灯9设置于清洗槽111内,用于对清洗槽111进行杀菌。
38.第二控制模块连接于按键面板,用于接收二次启动指令,根据二次启动指令控制阀门53在预设的第二时间段内打开,以及控制液位传感器112在第二时间段内工作;液位传感器112用于检测清洗槽111内的液位高度并输出当前液位信息;第二控制模块,还用于在当前液位信息小于基准液位信息时,输出动作指令;泵体51接收动作指令工作。
39.其中,二次启动指令可以为用户通过按键面板输入的指令,也可以第二控制模块接收到第一控制模块在第一清洗阶段结束后发出的控制指令。
40.第二控制模块接收到二次启动指令后,可通过内部配置的定时器,如单稳态触发的555定时器,在预设的第二时间段内(即定时器的内时时段内)持续输出二次启动指令,二次启动指令可以为高电平信号或者是低电平信号,液位传感器112接收到二次启动指令开始工作,当在当前液位信息小于基准液位信息时,输出动作指令;泵体51接收动作指令工作,基准液位信息表征清洗篮3底面的高度;在当前液位信息大于等于基准液位信息时,第二控制模块输出停机指令,泵体51接收停机指令停机。阀门53打开,液位下降,当液位低于清洗物底面的高度时,泵体51开始工作,将储液箱4内的液体泵送至喷头5处,喷头5对清洗物进行喷淋,实现对清洗物的二次清洗。
41.参照图1和图3,为了工作人员观看清洗过程,本技术实施例在清洗机还包括摄像头6和显示屏,摄像头6安装于壳体1内,摄像头6用于采集清洗槽111内的实时图像;显示屏设置于壳体1外侧且连接于摄像头6,接收实时图像并显示。
42.清洗机在工作进行过程中,可能会出现误操作终止程序,或者是断电的情况,此时若阀门53处于打开状态,则由于断电,导致阀门53持续开启的状态。工作人员再次使用清洗机时,加入清洗液时,清洗液可能会溢出。因为本技术实施例设置的第二控制模块接收阀门53的开关状态信息,显示屏连接于第二控制模块并显示开关状态信息,以便提示操作者知晓阀门53状态。
43.参照图1和图4,在壳体1的边沿上设置有压力传感器8,清洗篮3的边沿搭设在压力传感器8上,压力传感器8用于检测清洗篮3以及清洗篮3内载物的总重量并输出重量信息;第二控制模块还用于,接收重量信息,在重量信息减小至预设的基准重量信息时,生成复位指令;阀门53接收复位指令关闭。其中,基准重量信息表征清洗篮3的自重,当重量信息减小至基准重量信息时,说明工作人员将清洗物从清洗篮3内取出,此时生成复位指令,控制阀门53及时关闭。
44.参照图1,为了实现对清洗物全流程的清洗,本技术实施例壳体1内设置有风机7,风机7的进风口连通于大气,风机7的出风口朝向壳体1内。通过风机7送风,便于将清洗后的清洗物快速风干。
45.本技术实施例一种超声波清洗机的实施原理为:工作人员通过按键面板,输入相
应的控制指令,首先执行第一清洗阶段,通过超声波发生装置2对清洗物进行清洗;第一阶段清洗完毕后,输入二次启动指令,通过泵体51将清洗液泵送至喷头5处,对清洗物上残留的杂质进行进一步清理。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。