1.本技术涉及清扫设备技术领域,更具体而言,涉及一种机器人及机器人系统。
背景技术:
2.随着科技的不断发展,智能机器人逐渐走入人们的生活中。其中,拖地机器人能够在房间内完成地板清洁工作。然而,若拖地机器人工作一段时间后,由于抹布的脏污,则会降低拖地机器人的清洁效率,此时,需要人为更换抹布或清洗抹布,则会导致拖地机器人的清洁效率较低,且用户的使用体验较差。
技术实现要素:
3.本技术实施方式提供一种机器人及机器人系统。
4.本技术实施方式的机器人包括壳体、传动件和清洁件。所述传动件设置在所述壳体。所述清洁件设置在所述壳体的底壁,所述传动件可带动所述清洁件运动。在所述机器人移动到基座时,所述清洁件与所述基座设置的清洁结构接触,所述传动件带动所述清洁件运动时,所述清洁件与所述清洁结构相对运动。
5.在某些实施方式中,所述壳体包括顶壁、底壁和侧壁,所述顶壁与所述底板相对,所述侧壁连接所述顶壁和所述底壁,所述顶壁、所述底壁和所述侧壁围设成容置空间,所述传动件设置在所述容置空间。
6.在某些实施方式中,所述容置空间可用于收容水,当所述机器人运动时,所述容置空间可提供水给所述清洁件。
7.在某些实施方式中,所述传动件包括驱动部、转动部和运动部,所述驱动部驱动所述转动部转动,所述转动部转动带动所述运动部运动,以带动所述清洁件运动。
8.在某些实施方式中,所述清洁件包括承载部和清洁部,所述壳体的底壁开设有通孔,所述传动件穿设所述通孔与所述承载部连接,所述清洁件设置在所述承载部,所述传动件可带动所述承载部运动,以带动所述清洁部运动。
9.本技术实施方式的机器人系统包括基座及上述任一实施方式的机器人。所述机器人可移动至所述基座,以清洁所述清洁件。
10.在某些实施方式中,所述基座包括底板,所述底板包括清洁面,所述清洁结构设置在所述清洁面,在所述机器人移动到基座时,所述清洁件与所述清洁结构接触,所述传动件带动所述清洁件运动时,所述清洁件与所述清洁结构相对运动。
11.在某些实施方式中,所述清洁结构可以是间隔设置在所述清洁面的清洁片。
12.在某些实施方式中,所述清洁结构可以是间隔设置在所述清洁面的胶条。
13.在某些实施方式中,所述底板还包括导向件和导向面,所述导向件设置在所述导向面,所述导向面与所述清洁面连接,所述导向件用于引导所述机器人运动至所述清洁面。
14.在某些实施方式中,所述基座还包括水箱,所述水箱设置在所述底板,所述水箱可将水传递至所述清洁面。
可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
30.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
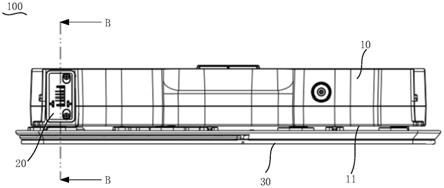
31.请参阅图1和图2,本技术实施方式提供一种机器人100。机器人100包括壳体10、传动件20和清洁件30。传动件20设置在壳体10。清洁件30设置在壳体10的底壁,传动件20可带动清洁件30运动。在机器人100移动到基座200时,清洁件30与基座200设置的清洁结构201接触,传动件20带动清洁件30运动时,清洁件30与清洁结构201相对运动。
32.本技术实施方式的机器人100中,由于传动件20可以带动清洁件30运动,且在机器人100移动到基座200时,清洁件30与基座200设置的清洁结构201接触。此时,传动件20带动清洁件30运动,可使清洁件30相对清洁结构201运动。如此,清洁件30可通过在清洁结构201上的相对运动,以完成对清洁件30的清洁工作,从而省去了人工更换清洁件30或清洗清洁件30的过程,提高了机器人100的清洁效率,并提高了用户的使用体验。
33.下面结合附图作进一步说明。
34.请参阅图1和图2,机器人系统1000包括机器人100和基座200。机器人100可移动至基座200上,以完成对清洁件30的清洁。
35.其中,机器人100可以是擦窗机器人、扫地机器人、拖地机器人等用于打扫卫生的机器人。本技术以机器人100是拖地机器人为例,可以理解,机器人100并不限于拖地机器人。
36.请再次参阅图1,机器人100包括壳体10、传动件20和清洁件30。传动件20和清洁件30设置在壳体10。
37.请结合图3,壳体10包括底壁11、顶壁12和侧壁13,侧壁13连接底壁11和顶壁12,底壁11和顶壁12相对。
38.其中,底壁11、顶壁12和侧壁13围设有一容置空间40,传动件20设置在容置空间40内。
39.壳体10的材质可以是金属、合成塑料和树脂等材质。
40.在一个实施例中,当壳体10的材质为金属时,一方面,壳体10可以保证足够的强度,以避免机器人100因碰撞发生损坏,另一方面,壳体10可具有较好的耐腐蚀性,以避免污水或清洁剂等液体对壳体10腐蚀而失去光泽,以提高机器人100的使用寿命。
41.在另一个实施方式中,当壳体10为合成塑料时,一方面,壳体10重量较轻,以便于用户使用机器人100,另一方面,壳体10具有良好的抗摔能力,以提高机器人100的使用寿命。
42.在某些实施方式中,容置空间40还可用于储存水,即壳体10可被作为水箱使用。具体地,在机器人100被用于清洁地面的过程中,清洁件30与地面直接接触,以清洁地面。此时,容置空间40的水可用于打湿清洁件30,以提高清洁件30清洁脏污的能力。
43.在某些实施方式中,容置空间40还可间隔出多个收容空间,如第一个收容空间收容水,第二个收容空间收容清洗剂、清洗液等液体。在机器人100清洁地面过程中,容置空间40的水和清洗剂可同时传递至清洁件30,从而进一步提高清洁件30清洁脏污的能力。
44.请结合图4,传动件20包括驱动部21、转动部22和运动部23。
45.具体地,驱动部21可以是直流电机、交流电机,也可以是单相电机、三相电机,还可以是同步电机、异步电机等。驱动部21用于提供动力给转动部22,即驱动转动部22转动。
46.转动部22连接驱动部21。当驱动部21开始工作时,则转动部22开始转动。
47.更具体地,运动部23分别连接转动部22和清洁件30,运动部23可以凸轮、偏心轮等部件,在转动部22转动时,转动部22还可带动运动部23转动,如此,则可带动清洁件30相对壳体10运动。
48.在一个实施方式中,运动部23为偏心轮,在转动部22带动运动部23转动时,运动部23的运动轨迹可呈类椭圆形,而运动部23和清洁件30连接,如此,清洁件30可被运动部23带动做类椭圆形的运动,以使清洁件30相对壳体10运动。那么,在机器人100进入基座200后,清洁件30与基座200的清洁结构201接触,清洁件30相对壳体10运动的同时,由于基座200不会运动,清洁件30也会相对清洁结构201运动,清洁件30便可与清洁结构201摩擦,从而清洗清洁件30。
49.在另一个实施方式中,运动部23为偏心轮,在转动部22带动运动部23转动时,运动部23转动一圈,运动部23的运动轨迹为沿机器人100的轴向方向上,作直线往复运动。清洁件30同样会沿机器人100的轴向方向上作直线往复运动,以使清洁件30相对壳体10,作直线往复运动。如此,在机器人100进入基座200后,基座200的清洁结构201会接触清洁件30,由于基座200不会运动,机器人100的清洁件30相对壳体10运动的同时,清洁件30也会相对清洁结构201运动,清洁件30便可与清洁结构201发生摩擦,从而达到清洗清洁件30的目的。
50.请结合图3,清洁件30包括承载部31和清洁部32。清洁部32设置在承载部31上。
51.具体地,承载部31与传动件20连接。如图3所示,壳体10的底壁11开设有通孔110,传动件20穿设通孔110与承载部31连接,传动件20可带动承载部31运动,而清洁部32设置在承载部31上,因此,传动件20带动承载部31运动时,则可带动清洁部32运动。
52.更具体地,如图4所示,传动件20的运动部23设置在承载部31上。驱动件驱动转动部22运动时,可带动运动部23运动,而运动部23设置在承载部31上,那么,驱动件驱动转动部22运动时,便可带动承载部31按照运动部23的运动轨迹运动,从而带动清洁件30按照运动部23的运动轨迹运动。
53.清洁部32的材质可以是棉纤维、竹纤维、超细纤维等材质。当机器人100用于清洁地面时,清洁部32与地面直接接触,从而完成对地面的清洁。
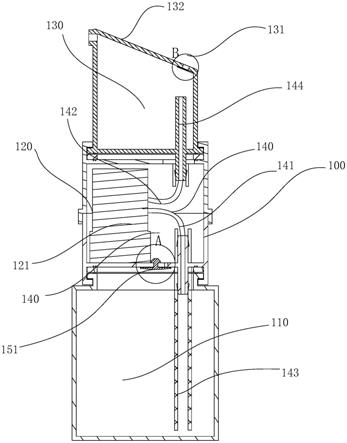
54.请结合图5,基座200包括底板202和水箱203。水箱203设置在底板202上。
55.底板202包括清洁面2021,清洁结构201设置在清洁面2021上。
56.具体地,请结合图6至图8,清洁结构201可以是间隔设置在清洁面2021上的清洁片2011,清洁结构201也可以是间隔设置在清洁面2021的胶条,清洁结构201还可以是间隔设
置在清洁面2021的毛条。
57.在一个实施方式中,若清洁结构201为间隔设置在清洁面2021上的清洁片2011,根据图8,可以看出,多个清洁片2011以将清洁结构201组成如搓衣板形式的结构。如此,在机器人100进入基座200,以使清洁件30与清洁结构201接触时,清洁件30能够相对机器人100的壳体10运动同时,由于基座200不会移动,则清洁件30会相对清洁结构201运动,如此,机器人100可在基座200上完成对清洁件30的自清洁,从而省去用户替换清洁件30的时间,以提高清洁效率。
58.在另一个实施方式中,若清洁结构201为间隔设置在清洁面2021上的胶条和毛条,在机器人100进入基座200,以使清洁件30与清洁结构201接触时,清洁件30能够相对机器人100的壳体10运动同时,由于基座200不会移动,则清洁件30会相对清洁结构201运动,如此,清洁结构201中的多个胶条可将清洁件30上的脏物(如纸屑、毛发等)粘除,而清洁结构201中的多个毛条可与清洁件30摩擦,以使机器人100完成对清洁件30的自清洁,从而省去用户替换清洁件30的时间,以提高清洁效率。
59.请结合图5,在某些实施方式中,底板202还包括导向面2022和导向件2023。导向件2023设置在导向面2022上。
60.导向面2022和清洁面2021连接,根据图5,可以看出,导向面2022和清洁面2021均为底板202的顶面。
61.导向件2023可以包括第一导向部20231和第二导向部20232,第一导向部20231和第二导向部20232相对,第一导向部20231和第二导向部20232之间的距离可被机器人100通过,以使机器人100运动至清洁面2021。
62.具体地,当机器人100向基座200行驶过程中,若机器人100与导向件2023发生碰撞,机器人100便可判断出自身与基座200的相对位置关系,从而改变自身的行动轨迹,以从第一导向件20231和第二导向件20232之间穿过。如此,机器人100便可准确的运动至清洁面2021,以使清洁件30与清洁结构201完全接触,避免清洁件30与清洁结构201接触不完成的情况出现,从而保证清洁件30的自清洁的效果。
63.请结合图5,水箱203设置在底板202上。
64.在一个实施方式中,水箱203可用于储存水,并将水传递至清洁面2021。如此,在机器人100运动至清洁面2021时,清洁件30和清洁结构201接触,清洁面2021的水便可对清洁件30的进行清洗,清洁件30相对清洁结构201运动,便可完成机器人100的自清洁工作。
65.在另一个实施方式中,水箱203中还可存储有清洁液。同样地,水箱203中的清洁液可传递至清洁面2021,如此,清洁件30相对清洁结构201运动时,清洁液便可加强对清洁件30的清洗,从而保证机器人100自清洁工作的清洁效果。
66.在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”的描述意指结合实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
67.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例
性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。