1.本实用新型涉及机器人技术领域,具体为六足仿生蜘蛛机器人。
背景技术:
2.在灾难搜救中应用救援机器人的研究起步比较晚,虽然现今机器人搜救技术不断更新,但大多仍停留在实验室阶段,并且还存在很多在搜救过程中难以克服的问题,因此在实际搜救行动中能发挥重要作用的搜救机器人很少。
3.现有技术中的机器人,不能沿着垂直墙面吸附运动,在高层幕墙式建筑外体等特殊场合在火灾、地震等危险灾难情况下的搜救、生命探测工作下一般的机器人无法满足使用需求。因此,设计六足仿生蜘蛛机器人是很有必要的。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本实用新型提供六足仿生蜘蛛机器人,本实用新型结构新颖,构思巧妙,通过控制板2控制18个舵机以及真空泵12工作,整体灵活度高,实现其在垂直墙面上的吸附、行走功能,可应用于高层幕墙式建筑外体等特殊场合在火灾、地震等危险灾难情况下的搜救、生命探测工作。
5.为实现上述目的,本实用新型提供如下技术方案:六足仿生蜘蛛机器人,包括机身,所述机身的内部安装有控制板,所述机身的四周安装有仿生机械腿,所述控制板电性连接仿生机械腿;
6.所述仿生机械腿包括连接座、第一舵机、第一关节臂、第二舵机、第二关节臂、第三舵机、第三关节臂、真空泵和真空吸盘;
7.所述连接座固定在机身的四周,所述连接座上安装有第一舵机,所述第一舵机与第一关节臂的一端活动连接,所述第一关节臂的另一端与第二关节臂底部一侧的第二舵机活动连接,所述第二关节臂的底部另一侧安装有第三舵机,所述第三舵机与第三关节臂的一端活动连接,所述第三关节臂的另一端安装有真空泵,所述真空泵的底部安装有真空吸盘。
8.优选的,所述机身的顶部四周安装有微型摄像头。
9.优选的,所述控制板采用stm32控制板。
10.优选的,所述第一舵机、第二舵机和第三舵机均采用mg90s舵机。
11.优选的,所述机身、连接座、第一关节臂、第二关节臂和第三关节臂均采用pla材料3d打印成型。
12.优选的,所述机身采用椭圆形结构。
13.本实用新型的有益效果为:
14.1、通过控制板控制18个舵机以及真空泵工作,整体灵活度高,实现其在垂直墙面上的吸附、行走功能;
15.2、机身、连接座、第一关节臂、第二关节臂和第三关节臂均采用pla材料3d打印成
型,pla材料本身是无毒且可生物降解,相较于其他材料更加绿色环保,同时得到的实体质量较小,更有利于该机器人在墙面上的行走;
16.3、机身选取椭圆形作为基本结构,在最大限度还原真实蜘蛛形态的基础上,增加机器人腿部活动空间,减少仿生机械腿之间的碰撞,避免行走过程中相互干涉;
17.4、通过设置的微型摄像头,基于视觉识别技术使其具有自动避障、循迹、色彩识别功能。
附图说明
18.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
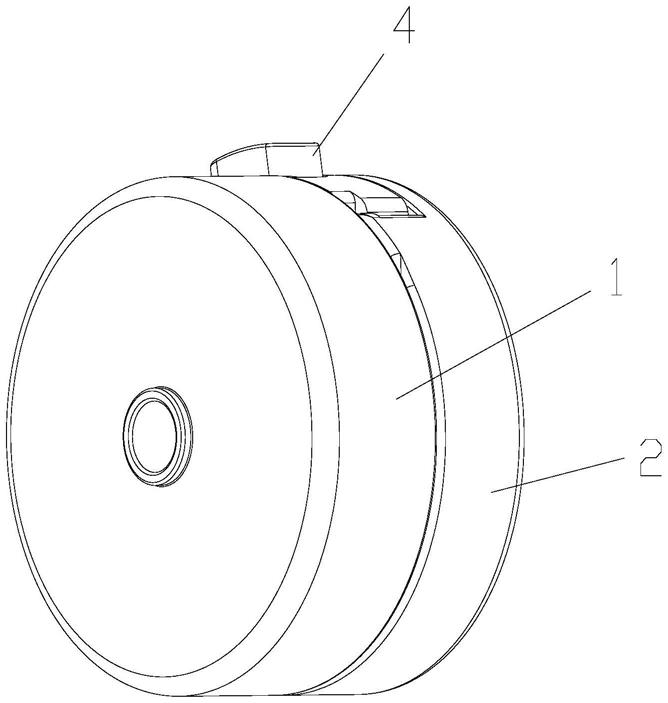
19.图1是本实用新型整体立体结构示意图;
20.图2是本实用新型仿生机械腿立体结构示意图之一;
21.图3是本实用新型仿生机械腿立体结构示意图之二;
22.图中标号:1、机身;2、控制板;3、仿生机械腿;4、微型摄像头;5、连接座;6、第一舵机;7、第一关节臂;8、第二舵机;9、第二关节臂;10、第三舵机;11、第三关节臂;12、真空泵;13、真空吸盘。
具体实施方式
23.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本实用新型的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
24.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
25.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述。
26.实施例一
27.由图1、图2和图3给出,本实用新型提供如下技术方案:六足仿生蜘蛛机器人,包括机身1,机身1的内部安装有控制板2,机身1的四周安装有仿生机械腿3,控制板2电性连接仿生机械腿3;
28.仿生机械腿3包括连接座5、第一舵机6、第一关节臂7、第二舵机8、第二关节臂9、第三舵机10、第三关节臂11、真空泵12和真空吸盘13;
29.连接座5固定在机身1的四周,连接座5上安装有第一舵机6,第一舵机6与第一关节臂7的一端活动连接,第一关节臂7的另一端与第二关节臂9底部一侧的第二舵机8活动连接,第二关节臂9的底部另一侧安装有第三舵机10,第三舵机10与第三关节臂11的一端活动连接,第三关节臂11的另一端安装有真空泵12,真空泵12的底部安装有真空吸盘13,通过控
制板2控制18个舵机以及真空泵12工作,整体灵活度高,实现其在垂直墙面上的吸附、行走功能,可应用于高层幕墙式建筑外体等特殊场合在火灾、地震等危险灾难情况下的搜救、生命探测工作。
30.优选的,控制板2采用stm32控制板。
31.优选的,第一舵机6、第二舵机8和第三舵机10均采用mg90s舵机,整体灵活度高,能够实现在各种复杂路况上的运动。
32.优选的,机身1、连接座5、第一关节臂7、第二关节臂9和第三关节臂11均采用pla材料3d打印成型,pla材料本身是无毒且可生物降解,相较于其他材料更加绿色环保,同时得到的实体质量较小,更有利于该机器人在墙面上的行走。
33.优选的,机身1采用椭圆形结构,机身1选取椭圆形作为基本结构,在最大限度还原真实蜘蛛形态的基础上,增加机器人腿部活动空间,减少仿生机械腿3之间的碰撞,避免行走过程中相互干涉。
34.实施例二
35.参照图1,作为另一优选实施例,与实施例一的区别在于,机身1的顶部四周安装有微型摄像头4,通过设置的微型摄像头4,基于视觉识别技术使其具有自动避障、循迹、色彩识别功能。
36.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.六足仿生蜘蛛机器人,包括机身(1),其特征在于:所述机身(1)的内部安装有控制板(2),所述机身(1)的四周安装有仿生机械腿(3),所述控制板(2)电性连接仿生机械腿(3);所述仿生机械腿(3)包括连接座(5)、第一舵机(6)、第一关节臂(7)、第二舵机(8)、第二关节臂(9)、第三舵机(10)、第三关节臂(11)、真空泵(12)和真空吸盘(13);所述连接座(5)固定在机身(1)的四周,所述连接座(5)上安装有第一舵机(6),所述第一舵机(6)与第一关节臂(7)的一端活动连接,所述第一关节臂(7)的另一端与第二关节臂(9)底部一侧的第二舵机(8)活动连接,所述第二关节臂(9)的底部另一侧安装有第三舵机(10),所述第三舵机(10)与第三关节臂(11)的一端活动连接,所述第三关节臂(11)的另一端安装有真空泵(12),所述真空泵(12)的底部安装有真空吸盘(13)。2.根据权利要求1所述的六足仿生蜘蛛机器人,其特征在于:所述机身(1)的顶部四周安装有微型摄像头(4)。3.根据权利要求1所述的六足仿生蜘蛛机器人,其特征在于:所述控制板(2)采用stm32控制板。4.根据权利要求1所述的六足仿生蜘蛛机器人,其特征在于:所述第一舵机(6)、第二舵机(8)和第三舵机(10)均采用mg90s舵机。5.根据权利要求1所述的六足仿生蜘蛛机器人,其特征在于:所述机身(1)、连接座(5)、第一关节臂(7)、第二关节臂(9)和第三关节臂(11)均采用pla材料3d打印成型。6.根据权利要求1所述的六足仿生蜘蛛机器人,其特征在于:所述机身(1)采用椭圆形结构。
技术总结
本实用新型公开了六足仿生蜘蛛机器人,包括机身,机身的内部安装有控制板,机身的四周安装有仿生机械腿,控制板电性连接仿生机械腿,仿生机械腿包括连接座、第一舵机、第一关节臂、第二舵机、第二关节臂、第三舵机、第三关节臂、真空泵和真空吸盘,连接座固定在机身的四周,连接座上安装有第一舵机,第一舵机与第一关节臂的一端活动连接,第一关节臂的另一端与第二关节臂底部一侧的第二舵机活动连接。本实用新型结构新颖,构思巧妙,通过控制板2控制18个舵机以及真空泵12工作,整体灵活度高,实现其在垂直墙面上的吸附、行走功能,可应用于高层幕墙式建筑外体等特殊场合在火灾、地震等危险灾难情况下的搜救、生命探测工作。生命探测工作。生命探测工作。
技术研发人员:寇洪瑞 鲍玉冬 毛竹林
受保护的技术使用者:寇洪瑞
技术研发日:2022.01.25
技术公布日:2022/5/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。