1.本发明涉及室内三维定位技术和人机协同技术领域,尤其涉及一种室内空间协同作业安全保障方法及系统。
背景技术:
2.在飞机制造、飞机维修、大型装备制造、大型装备维修等大型车间中,常常需要在室内空间实施协同作业,包括作业人员在地面以及多种高度的作业平台的操作,被测部件在一定空间的动作,行车吊装物件的操作,agv车辆在地面的自主活动,机器人在一定空间范围的操作,以及电磁辐射设备的操作等等,这些复杂的操作,一旦发生冲突,就可能引发安全事故,所以室内空间协同作业的安全保障显得尤为重要。
3.室内定位包括无线电定位、毫米波雷达、视频检测等技术手段,其中亚米级及以上的无线电定位技术包括蓝牙、uwb(超宽带)等。上述无线电定位技术,可以达到水平亚米级的定位精度。根据成章才的《基于蓝牙与气压计融合的室内三维定位技术研究》,以及ji li等的《improved height estimation using extended kalman filter on uwb-barometer 3d indoor positioning system》等文献,可以通过引入气压传感器来测量高度的变化,辅助蓝牙和uwb等室内定位,可以达到亚米级的室内高程的测量,实现三维室内定位。
4.当前无线电室内定位技术不能完全满足室内空间协同作业安全保障要求,主要不足体现在以下两个方面:其一是室内定位结果是空间的点,而室内的作业人员、设备、设施具有一定的三维体积和安全空间范围,单纯获得室内三维定位单点结果,不能保障三维物体的安全保障;其二是室内作业的人员、设备、设施具有固定或随机的运动轨迹,单纯考虑当前位置,也不足以实现协同工作的安全保障。因此,现有技术有待改进和提高。
技术实现要素:
5.本发明要解决的技术问题是提供一种室内空间协同作业安全保障方法及系统,解决现有技术单纯获得室内三维定位单点结果,不能保障三维物体的安全,以及单纯考虑当前位置,不足以实现协同工作的安全保障的问题。
6.本发明为解决上述技术问题而采用的技术方案是提供一种室内空间协同作业安全保障方法,包括如下步骤:s1:在室内空间部署定位基站,部署定位告警标签和参考标签;每个所述定位告警标签和参考标签具有唯一的标签编号;所述定位告警标签和参考标签均内置有气压计;所述定位告警标签部署在对协同工作具有安全隐患的物体上;s2:定位基站从定位告警标签获取标签编号及其气压测量值和定位数据包,定位基站根据定位数据包计算得到二维定位结果;定位基站从参考标签获取标签编号及其气压测量值;s3:三维位置解算设备根据参考标签的气压测量值与其高度的对应关系计算得到定位告警标签的高度值,结合定位告警标签的二维定位结果得到三维定位结果,并发送给安全检测设备;s4:安全检测设备从安全规则配置设备获取对协同工作具有安全隐患的物体的三维安全模型,并获取定位告警标签在三维安全模型的三维立体几何体中的位置;s5:安全检测设备根据定位告
警标签的三维定位结果以及步骤s5中获取的三维安全模型信息计算三维模型之间的最近距离;s6:若最近距离小于等于零,则说明三维模型之间有碰撞的可能,安全检测设备发出报警。
7.进一步地,所述定位基站为蓝牙定位基站,所述定位告警标签为双向蓝牙告警标签;所述参考标签为蓝牙参考标签,所述参考标签部署在固定位置,所述参考标签为多个,多个所述参考标签的高度均为不同的已知安装高度。
8.进一步地,所述步骤s2包括:s21:定位基站在室内组网后,发送秒同步消息;s22:定位告警标签接收定位基站发送的秒同步消息后,根据标签编号,每个定位告警标签延迟不同的时间后,发送无线电信号到定位基站,无线电信号传输的内容包括定位告警标签的标签编号、气压测量值和用于aoa定位的数据包;s23:定位基站根据aoa定位的数据包通过aoa定位方法计算定位告警标签的二维位置;s24:参考标签接收定位基站发送的秒同步消息后,根据标签编号,每个参考标签延迟不同的时间后,发送无线电信号到定位基站,无线电信号传输内容包括参考标签的标签编号和气压测量值。
9.进一步地,所述步骤s3包括:s31:定位基站将定位告警标签的标签编号、二维定位结果、气压测量值和时间戳发送给三维位置解算设备;s32:定位基站将参考标签的标签编号、气压测量值和时间戳发送到三维位置解算设备;s33:三维位置解算设备存储了参考标签的安装高度,采用扩展卡尔曼滤波算法,根据气压测量值计算定位告警标签的高度值,结合定位告警标签的二维定位结果得到三维定位结果,并发送给安全检测设备;发送内容包括定位告警标签的标签编号、三维定位结果和时间戳。
10.进一步地,所述步骤s5包括:s51:安全检测设备根据定位告警标签的三维定位结果、三维安全模型和定位告警标签在三维安全模型的三维立体几何体中的位置,计算三维立体几何体的当前位置;s52:安全检测设备采用gjk算法根据三维立体几何体的当前位置计算三维安全模型的最近距离。
11.进一步地,所述安全规则配置设备编辑和存储对协同工作具有安全隐患的物体的三维安全模型,对协同工作具有安全隐患的物体包括作业人员、设备和设施;所述三维安全模型是协同工作空间安全边界的三维模型,具有简单的三维立体几何形状;所述三维安全模型与设备以及设施的工作状态有关,根据设备以及设施的工作状态设置有停机三维安全模型、待机三维安全模型和工作三维安全模型;根据设备以及设施的工作状态调用对应状态的三维安全模型;所述安全规则配置设备编辑和存储作业人员、设备和设施上部署的定位告警标签在三维安全模型中的位置。
12.进一步地,所述步骤s6还包括所述安全检测设备通过定位基站发送告警消息到三维模型对应的定位告警标签,所述定位告警标签根据告警消息发出声光报警。
13.本发明为解决上述技术问题而采用的技术方案是提供一种室内空间协同作业安全保障系统,包括三维室内定位分系统、安全检测设备和安全规则配置设备;所述三维室内定位分系统,包括定位告警标签、参考标签、定位基站和三维位置解算设备;所述定位基站在室内组网,所述定位基站与定位告警标签以及参考标签通讯,所述定位基站对定位告警标签进行aoa定位,所述三维位置解算设备与定位基站连接用于解算定位告警标签的三维位置;所述安全检测设备包括存储器、处理器和网络接口,所述存储器存储有程序和数据,所述程序用于被所述处理器运行以执行计算三维安全模型的三维立体几何体的当前位置
以及计算三维安全模型之间的最近距离;所述网络接口用于连接定位基站和安全规则配置设备;所述安全规则配置设备,包括存储器、处理器和网络接口,所述存储器存储有程序和数据,所述程序用于被所述处理器运行以执行作业人员、设备以及设施的三维安全模型的编辑;所述存储器用于存储作业人员、设备以及设施的三维安全模型数据;所述网络接口用于连接安全检测设备以访问存储在安全规则配置设备的存储器中的三维安全模型数据。
14.进一步地,还包括网络授时设备,所述网络授时设备向系统提供时间基准。
15.本发明对比现有技术有如下的有益效果:本发明提供的室内空间协同作业安全保障方法及系统,采用安全规则配置设备创建作业人员、设备、设施的三维安全模型;采用基于参考气压值的三维室内定位方法,获取室内作业人员、设备、设施三维定位的点结果,计算人员、设备、设施三维安全立体几何体的位置;根据定位点在三维安全立体几何体中的位置进行三维安全模型碰撞检测,可以在碰撞发生前,对碰撞的风险进行报警;有利于提高空间多个人员、设备、设施协同工作的安全性,对比单纯考虑定位点的安全保障方案,安全保障更加立体,可以防范碰撞事故的发生。
附图说明
16.图1为本发明的室内空间协同作业安全保障方法流程图;
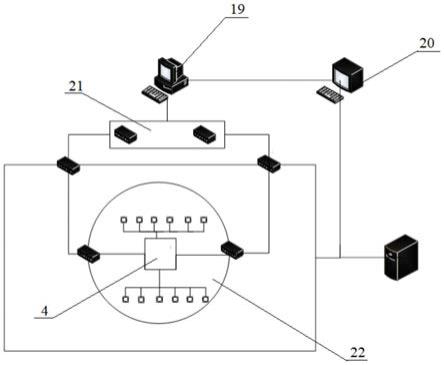
17.图2为本发明实施例的室内空间协同作业安全保障系统的结构示意图;
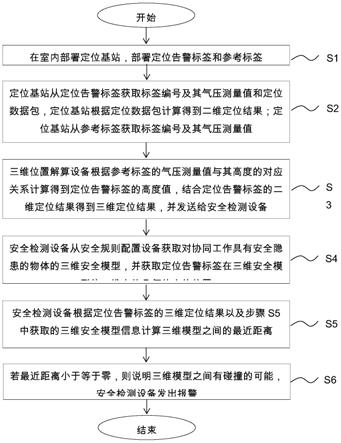
18.图3为本发明实施例的室内空间协同作业安全保障方法的流程示意图;
19.图4为本发明实施例的三维安全模型场景示意图。
具体实施方式
20.下面结合附图和实施例对本发明作进一步的描述。
21.图1为本发明的室内空间协同作业安全保障方法流程图。
22.请参见图1,本发明的室内空间协同作业安全保障方法,包括如下步骤:
23.步骤s1:在室内空间部署定位基站,部署定位告警标签和参考标签;每个所述定位告警标签和参考标签具有唯一的标签编号;所述定位告警标签和参考标签均内置有气压计;所述定位告警标签部署在对协同工作具有安全隐患的物体上;
24.定位基站为蓝牙定位基站,所述定位告警标签为双向蓝牙告警标签;所述参考标签为蓝牙参考标签,所述参考标签部署在固定位置,所述参考标签为多个,多个所述参考标签的高度均为不同的已知安装高度。
25.步骤s2:定位基站从定位告警标签获取标签编号及其气压测量值和定位数据包,定位基站根据定位数据包计算得到二维定位结果;定位基站从参考标签获取标签编号及其气压测量值;
26.步骤s2具体包括:
27.s21:定位基站在室内组网后,发送秒同步消息;
28.s22:定位告警标签接收定位基站发送的秒同步消息后,根据标签编号,每个定位告警标签延迟不同的时间后,发送无线电信号到定位基站,无线电信号传输的内容包括定位告警标签的标签编号、气压测量值和用于aoa(angle-of-arrival)定位的数据包;aoa定位即到达角定位;
29.s23:定位基站根据aoa定位的数据包通过aoa定位方法计算定位告警标签的二维位置;aoa定位方法即为到达角定位方法;
30.s24:参考标签接收定位基站发送的秒同步消息后,根据标签编号,每个参考标签延迟不同的时间后,发送无线电信号到定位基站,无线电信号传输内容包括参考标签的标签编号和气压测量值。
31.步骤s3:三维位置解算设备根据参考标签的气压测量值与其高度的对应关系计算得到定位告警标签的高度值,结合定位告警标签的二维定位结果得到三维定位结果,并发送给安全检测设备;
32.步骤s3包括:
33.s31:定位基站将定位告警标签的标签编号、二维定位结果、气压测量值和时间戳发送给三维位置解算设备;
34.s32:定位基站将参考标签的标签编号、气压测量值和时间戳发送到三维位置解算设备;
35.s33:三维位置解算设备存储了参考标签的安装高度,采用扩展卡尔曼(kalman)滤波算法,根据气压测量值计算定位告警标签的高度值,结合定位告警标签的二维定位结果得到三维定位结果,并发送给安全检测设备;发送内容包括定位告警标签的标签编号、三维定位结果和时间戳。
36.步骤s4:安全检测设备从安全规则配置设备获取对协同工作具有安全隐患的物体的三维安全模型,并获取定位告警标签在三维安全模型的三维立体几何体中的位置;
37.安全规则配置设备编辑和存储对协同工作具有安全隐患的物体的三维安全模型,对协同工作具有安全隐患的物体包括作业人员、设备和设施;所述三维安全模型是协同工作空间安全边界的三维模型,具有简单的三维立体几何形状;所述三维安全模型与设备以及设施的工作状态有关,根据设备以及设施的工作状态设置有停机三维安全模型、待机三维安全模型和工作三维安全模型;根据设备以及设施的工作状态调用对应状态的三维安全模型;所述安全规则配置设备编辑和存储作业人员、设备和设施上部署的定位告警标签在三维安全模型中的位置。
38.步骤s5:安全检测设备根据定位告警标签的三维定位结果以及步骤s5中获取的三维安全模型信息计算三维模型之间的最近距离;
39.步骤s5具体包括:
40.s51:安全检测设备根据定位告警标签的三维定位结果、三维安全模型和定位告警标签在三维安全模型的三维立体几何体中的位置,计算三维立体几何体的当前位置;
41.s52:安全检测设备采用gjk(gilbert
–
johnson
–
keerthi)算法根据三维立体几何体的当前位置计算三维安全模型的最近距离。
42.步骤s6:若最近距离小于等于零,则说明三维模型之间有碰撞的可能,安全检测设备发出报警。所述安全检测设备通过定位基站发送告警消息到三维模型对应的定位告警标签,所述定位告警标签根据告警消息发出声光报警。
43.请参见图2,本发明的室内空间协同作业安全保障系统,包括三维室内定位分系统、安全检测设备和安全规则配置设备;所述三维室内定位分系统,包括定位告警标签、参考标签、定位基站和三维位置解算设备;所述定位基站在室内组网,所述定位基站与定位告
警标签以及参考标签通讯,所述定位基站对定位告警标签进行aoa定位,所述三维位置解算设备与定位基站连接用于解算定位告警标签的三维位置;
44.安全检测设备包括存储器、处理器和网络接口,所述存储器存储有程序和数据,所述程序用于被所述处理器运行以执行计算三维安全模型的三维立体几何体的当前位置以及计算三维安全模型之间的最近距离;所述网络接口用于连接定位基站和安全规则配置设备;
45.安全规则配置设备,包括存储器、处理器和网络接口,所述存储器存储有程序和数据,所述程序用于被所述处理器运行以执行作业人员、设备以及设施的三维安全模型的编辑;所述存储器用于存储作业人员、设备以及设施的三维安全模型数据;网络接口用于连接安全检测设备以访问存储在安全规则配置设备的存储器中的三维安全模型数据。
46.还包括网络授时设备,所述网络授时设备向系统提供时间基准。
47.请同时参见图2-图4,本发明的室内空间协同作业安全保障方法,在一具体实施例中,步骤如下:
48.蓝牙定位基站发送秒同步消息;在室内空间中分布了多个蓝牙定位基站,形成无线电信号的覆盖,每个蓝牙定位基站每秒在不同的信道上发送秒同步消息;秒同步消息的基准来自于网络授时设备。
49.室内的作业人员佩戴内置气压计的双向蓝牙定位告警标签t1,一般地,佩戴于安全头盔上;同时,对协同工作构成安全隐患的设备、设施也贴上内置气压计的双向蓝牙定位告警标签t2、t3;每个标签有唯一的标签编号;
50.内置气压计的双向蓝牙定位告警标签接收到蓝牙定位基站发送的秒同步消息后,计算延迟时间:tx=rand(idx);其中,tx为延迟时间,单位为ms;
51.rand()可以生成一个0-rand_max之间的一个随机数,rand_max是最大延迟时间,不超过1000ms;标签编号idx作为生成随机数的种子。
52.每个定位告警标签延迟不同的时间tx后,发送无线电信号,信号传输消息内容包括标签编号(idi)、气压测量值(pi)和用于aoa定位的数据包;不同时延可以避免发送信号的冲突。
53.蓝牙定位基站通过aoa定位方法计算定位告警标签的二维位置。
54.蓝牙定位基站将定位告警标签的标签编号、二维定位结果、气压测量值、时间戳(即idi、xi、yi、pi、ti)发送给三维解算设备。其中,标签编号和气压测量值来自定位告警标签主动发射的消息;时间戳的基准来自于网络授时设备。
55.室内空间的气压值随高度不同会发生变化,但是与室外不同,这种变化的线性度不好,需要进行根据在参考高度的气压测量值,计算实际气压测量值所代表的高度。因此,在室内设置内置气压计的蓝牙参考标签ft1、ft2、ft3,安装在室内不同高度。
56.内置气压计的蓝牙参考标签接收到蓝牙定位基站发送的秒同步消息后,根据标签编号,延迟不同的时间后,发送无线电信号,信号传输内容包括标签编号(fidj)和气压计测量值(fpj);不同时延可以避免发送信号的冲突。
57.蓝牙定位基站接收到参考标签发送的信号后,将标签编号、气压计测量值、时间戳(即fidj、fpj、tj)发送给三维解算设备;其中,标签编号、气压测量值来自于参考标签主动发射的消息;时间戳的基准来自于网络授时设备。
58.三维解算设备采用扩展kalman滤波算法,根据事前存储的内置气压计的蓝牙参考标签的实际安装高度(zj),计算内置气压计的双向蓝牙告警标签的实际高度(zi),再结合内置气压计的双向蓝牙告警标签的二维定位位置,得出其三维位置(xi、yi、ti)。三维解算设备发送信息到安全检测设备,信息内容包括定位告警标签编号、三维定位结果和时间戳(即idi、xi、yi、zi、ti)。
59.安全检测设备根据定位告警标签实时位置、三维安全模型和定位告警标签在三维立体几何体中的位置,计算三维立体几何体当前位置;如图3所示,当定位告警标签t1、t2、t3位置变化后,更新三维安全模型g1、g2、g3的位置。
60.安全检测设备采用gjk算法计算任意两个三维安全模型的最近距离,以此做碰撞检测。
61.当安全检测设备检测到当前的碰撞可能时,发出报警,包括安全检测设备发生声音报警,在显示画面上,可能碰撞的三维安全模型闪烁;还可以联动控制相应设备,以停止进一步地操作。还可以通过蓝牙定位基站,发送告警消息给相应作业人员、设备、设施上的定位告警标签。定位告警标签可以内置指示灯和蜂鸣器或喇叭,以发出声光报警。
62.安全规则配置设备编辑和存储作业人员、设备、设施三维安全模型,以及定位告警标签在三维安全模型中的位置;通用网络接口,安全检测设备访问安全规则配置设备的存储器中的三维安全模型数据。该安全模型与设备、设施的工作状态有关。同一设备可以编辑和设置多种三维安全模型。如图4所示,g1为佩戴t1标签的作业人员的三维安全模型;g2为作业平台的三维安全模型;g3为机械臂工作状态的三维安全模型。
63.可通过安全检测设备调用安全规则配置设备存储的设备、设施不同的工作状态的安全模型,来推演预测安全隐患。同一设备有多种三维安全模型,例如机械臂有停机、待机、工作三种三维安全模型。可以在机械臂停机和待机时,在安全检测设备上调用安全规则配置设备存储的其工作状态的三维安全模型,以预测其一旦工作,是否会存在安全隐患。此时,当安全检测设备推演出碰撞可能时,也发出告警,即在显示画面上,可能碰撞的三维安全模型闪烁,但是不发送给蓝牙基站和相应的定位告警标签。
64.综上所述,本发明实施例的室内空间协同作业安全保障方法及系统,,采用安全规则配置设备创建作业人员、设备、设施的三维安全模型;采用基于参考气压值的三维室内定位方法,获取室内作业人员、设备、设施三维定位的点结果,计算人员、设备、设施三维安全立体几何体的位置;根据定位点在三维安全立体几何体中的位置进行三维安全模型碰撞检测,可以在碰撞发生前,对碰撞的风险进行报警;有利于提高空间多个人员、设备、设施协同工作的安全性,对比单纯考虑定位点的安全保障方案,安全保障更加立体,可以防范碰撞事故的发生。
65.虽然本发明已以较佳实施例揭示如上,然其并非用以限定本发明,任何本领域技术人员,在不脱离本发明的精神和范围内,当可作些许的修改和完善,因此本发明的保护范围当以权利要求书所界定的为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。