一种电动循迹移动桌
所属技术领域
1.本发明提供了一种可移动的桌子,具体来说是一种依靠电力驱动并沿地面记号线进行移动的桌子。
背景技术:
2.目前传统的桌子在教学或商业的使用中,无法根据实际使用需求进行可控的自动化移动。或由于在设计中使用了高成本的激光雷达、地面导轨等辅助定位设备,致使移动桌的制造和安装成本过高,无法在广泛的使用场景中得到实际应用。
3.在一些设计中,移动桌没有将驱动组件与桌体组件进行分离,造成当驱动组件出现故障时,必须进行整体维修或淘汰,无法满足教学或商业使用中低成本维修和快速维修的需要。
技术实现要素:
4.本发明的目的是针对现有技术中的不足,提供一种电动循迹移动桌,通过预先在地面粘贴具有视觉引导作用或磁性引导作用的记号线,具有电动驱动装置桌子依靠视觉或磁性循迹模块,可沿记号线进行移动。
5.为实现上述目的,本发明采取的技术方案是:
6.一种电动循迹移动桌,包括驱动组件和桌体组件,所述桌体组件套于驱动组件之外。
7.所述的驱动组件中部具有电池组、无线遥控电路板、驱动电机程控电路板和驱动电机,电池组经由无线遥控电路板与驱动电机程控电路板相连,驱动电机程控电路板与驱动电机相连。
8.所述驱动组件下部侧壁上设置视觉循迹模块和磁性循迹模块,其实时反馈地面记号线的相对位置信号至与其连接的驱动电机程控电路板。
9.所述驱动组件底部设置四个驱动组件轮,其与驱动电机相连,驱动电机根据驱动电机程控电路板的信号分别控制四个驱动组件轮的转速以完成差速转弯。
10.所述桌体组件上部设置桌面层,中部设置动力容纳腔,底部设置具有四个桌体组件轮的支持层。
11.本发明的有益效果是:本发明通过使用视觉循迹模块和磁性循迹模块实现对地面记号线的相对定位,通过经驱动电机驱动四个驱动组件轮以不同转速运行,实现驱动组件沿既定地面记号线移动,带动套于其外的桌体组件运动,以较低的综合成本达到桌子在任意场地内以无线方式操控移动的效果。
附图说明
12.下面结合附图和实施例对本发明进一步说明。
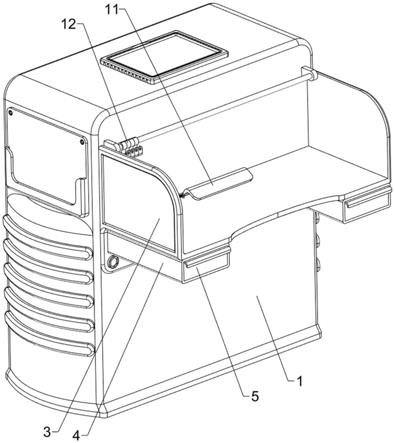
13.图1是本发明在一实施例中的立体结构示意图。
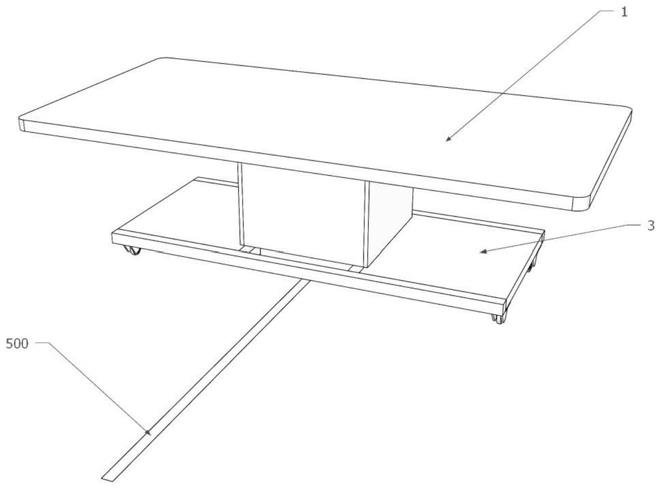
14.图2是本发明在一实施例中在仰视状态下的立体结构示意图。
15.图3是本发明在一实施例中的剖视图。
16.图4是本发明的桌体组件在一实施例中,驱动组件被取出后的剖视图。
17.图5是本发明的驱动组件的在仰视状态下的立体结构示意图。
18.图6是本发明的驱动组件的一种爆炸立体结构示意图。
19.图标:1-桌面层;2-动力容纳腔;3-桌体组件支撑层;4-桌体组件轮;5-驱动组件;6
‑ꢀ
驱动组件轮;100-磁性循迹模块;110-视觉循迹模块;115-视觉循迹摄像头;200-驱动电机; 300-电池组;401-驱动电机程控电路板;402-无线遥控电路板;500-地面记号线。
具体实施方式
20.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
21.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
23.在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
24.此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
25.需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
26.在图1所示实施例中,电动循迹移动桌上部是桌面层(1),下部是桌体组件支撑层(3),电动循迹移动桌下方的地面上有地面记号线(500),电动循迹移动桌沿地面记号线(500)行驶。
27.在图2所示实施例中,桌面层(1)与桌体组件支撑层(3)的中间为动力容纳腔(2),桌体组件轮(4)与桌体组件支撑层(3)固定,动力容纳腔(2)内有驱动组件(5),驱动组件(5)底部有驱动组件轮(6)。
28.在图3所示实施例中,驱动组件(5)位于动力容纳腔(2)内。
29.在图4所示实施例中,驱动组件(5)被从动力容纳腔(2)内取出。
30.在图5所示中,驱动组件(5)内部底部有驱动组件轮(6)由驱动电机(200)驱动,内壁一侧装有磁性循迹模块(100),内壁另一侧装有视觉循迹模块(110),视觉循迹模块(110)靠地面方向位置具有视觉循迹摄像头(115)。
31.在图6所示中,电池组(300)通过导线与无线遥控电路板(402)相连,当无线遥控电
路板(402)收到相应无线信号后,控制整个设备的启动停止、移动速度和运行时间,输出相应控制命令至驱动电机程控电路板(401)。驱动电机程控电路板(401)同时接收到磁性循迹模块(100)或视觉循迹模块(110)提供的本设备相对地面记号线(500)的位置信息,实时控制驱动电机(200)以不同转速运行。
技术特征:
1.一种电动循迹移动桌,通过使用视觉循迹模块和磁性循迹模块实现对地面记号线的相对定位,通过经驱动电机驱动四个驱动组件轮以不同转速运行,实现驱动组件沿既定地面记号线移动,带动套于其外的桌体组件运动。2.根据权利要求1所述的电动循迹移动桌,其特征是:通过基于磁性的循迹模块探测地面记号线。3.根据权利要求1所述的电动循迹移动桌,其特征是:通过基于视觉识别的循迹模块探测地面记号线。4.根据权利要求1所述的电动循迹移动桌,其特征是:磁性循迹模块和视觉循迹模块输出自身相对于地面记号线的相对位置至与其连接的驱动电机程控电路板,磁性循迹模块和视觉循迹模块均可独立完成位置识别,电动循迹移动桌可仅依靠一种模块正常运行。5.根据权利要求1所述的电动循迹移动桌,其特征是:驱动电机程控电路板可分别控制不同的驱动电机以不同转速运行,带动驱动组件轮,形成不同的轮速用以直线行进或转弯。6.根据权利要求1所述的电动循迹移动桌,其特征是:驱动组件可与桌体组件分离。7.根据权利要求6所述的电动循迹移动桌,其特征是:桌体组件中的桌面层不受限于特定形状,最小面积可与驱动组件上表面相同。8.根据权利要求6所述的电动循迹移动桌,其特征是:桌体组件具有独立的桌体组件轮。
技术总结
本发明的实施例提供了一种可移动的桌子,具体来说为一种电动循迹移动桌,涉及智能家具领域。本发明通过使用视觉循迹模块和磁性循迹模块实现对地面记号线的相对定位,通过经驱动电机驱动四个驱动组件轮以不同转速运行,实现驱动组件沿既定地面记号线移动,带动套于其外的桌体组件运动,以较低的综合成本达到桌子在任意场地内以无线方式操控移动的效果。任意场地内以无线方式操控移动的效果。任意场地内以无线方式操控移动的效果。
技术研发人员:ꢀ(51)Int.Cl.A47B13/00
受保护的技术使用者:深圳市古卡未来科技有限公司
技术研发日:2021.12.15
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。